
OCCUPATIONAL APPLICATIONS
Occupational exoskeletons receive rising interest in industry as these devices diminish the biomechanical load during manual materials handling. Still, we have limited knowledge when it comes to in-field use. This gap often contributes to failure in the implementation of exoskeleton in industry. In this study, we investigated how a training protocol consisting of in-field use of a passive back exoskeleton affected the biomechanics of logistic workers. More specifically, we focused on how the variation of the muscular and kinematic patterns of the user was altered after exoskeleton training. We found that training had a positive effect on exoskeleton use, as a relative decrease of 6–9% in peak back muscle activity was observed post-training. Additionally, training decreased knee flexion by 6°–16°, indicating a more stoop lifting technique. The findings point at the potential benefits of applying a training approach when implementing a back-supporting exoskeleton in logistics.
TECHNICAL ABSTRACT
Background: Occupational exoskeletons are an attractive solution to reduce the prevalence of attrition and work-related musculoskeletal disorders, such as low back pain, among manual workers. However, research has mostly focused on acute effects, while the effects of in-field use, and exoskeleton training are still to be addressed. Purpose: The aim of the present paper was to investigate how in-field use and exoskeleton training affected the biomechanics, acceptance, and comfort of logistic workers when using a passive back exoskeleton. Methods: Twenty workers were randomly distributed into control and intervention group. The tests consisted of standard lifting tasks with and without exoskeleton before and after a 5-week period. The intervention group underwent a 5-week progressive training protocol aiming at increasing the duration of use of the exoskeleton. The variation in muscle activity (surface electromyography) and full-body kinematics (IMU-based motion capture) were assessed during logistic work tasks. Additionally, acceptance, comfort, and perceived effort were collected. Compliance to the training protocol reached 74%. Results: Using the exoskeleton resulted in a 13–20% reduced variation in muscle activity of the back muscles across groups and lifting conditions including trunk extension. The changes in variation were driven by a decrease in peak muscle activity, which was further lowered by 6–9% after the 5-week training. Additionally, training induced decreased knee flexion indicating a more stoop lifting technique in the intervention group. Conclusions: The present results demonstrate that exoskeleton training optimized the human-exoskeleton interaction by deriving more effects of the exoskeleton – in this case by lowering the peak muscle activity of the user during manual materials handling. This underlines the importance of introducing training when implementing exoskeletons in industry. Additionally, the results indicate that a progressive implementation of back supporting exoskeletons in logistics can be beneficial in terms of lowering the biomechanical load during manual materials handling.
1. Introduction
In the logistics industry, workers frequently perform heavy lifts and repetitive movements in awkward postures. The risk of developing work-related musculoskeletal disorders (WMSDs) is therefore a major concern (Da Costa & Vieira, Citation2010). The highest prevalence of observed WMSDs in manual work is back pain, which was reported as an issue by 43% of all workers within the past 12 months in 2015 (De Kok et al., Citation2019). Thus, this represents the biggest contributor to attrition and sick leave among manual workers (Govaerts et al., Citation2021; James et al., Citation2018). Additionally, back pain is stated as a society-related issue, as the leading worldwide cause to years lost to disability (Bendix, Citation2006; Buchbinder et al., Citation2018).
To address this issue, occupational exoskeletons have emerged as a relevant solution, as these wearable mechanical systems, designed to assist the worker with additional force, have been shown to lower the acute physical load of target areas of the body (Bär et al., Citation2021). Passive back exoskeletons especially have been suggested as beneficial in logistics manual materials handling (MMH), as decreases in the level of muscular activity and compression forces of the lower back during lifting tasks, including forward trunk bending, have been revealed through surface electromyographic (SEMG) and musculoskeletal modeling analyses, respectively (Koopman et al., Citation2020; Schmalz et al., Citation2022). Furthermore, even though active exoskeletons seem to be better suited for heavier demanding tasks (Poliero et al., Citation2022; Schwartz et al., Citation2023; Toxiri et al., Citation2019), passive exoskeletons are often preferred in the field compared with active exoskeletons, as they are lighter, which is advantageous for work including a lot of walking. Moreover, passive exoskeletons are in general more affordable, which is a determining criterion for large-scale deployment for companies (Baldassarre et al., Citation2022). However, several limitations associated with the use of occupational passive exoskeletons need to be investigated before facilitating a large-scale implementation in industry (Nussbaum et al., Citation2019). One of the most critical factors related to occupational implementation is modification of kinematics, which can both be positive or negative related to the context of use (Madeleine & Madsen, Citation2009). Yet, this is often related to discomfort leading to a lack of user acceptance (de Looze et al., Citation2016). Moreover, discomfort can be driven by other factors as well (e.g. adjustability/fit, or thermal discomfort), resulting in unsuccessful implementation of the devices (Nussbaum et al., Citation2019). Yet, our knowledge is almost entirely based on laboratory or short-term studies, emphasizing the need of in-field investigations on how biomechanics, level of comfort, and acceptance alters over time (Nussbaum et al., Citation2019).
One of the largest barriers to the occupational use of exoskeletons is the facilitation of successful implementation including training the use of such devices (Crea et al., Citation2021). Previous studies underline the importance of training through well-designed training protocols (Diamond-Ouellette et al., Citation2022; Moyon et al., Citation2019). Furthermore, Poggensee and Collins (Citation2021) found that the time for the effects of exoskeleton use to stabilize are much longer than most studies tend to use for familiarization. These authors reported a steady state after 91–131 min, but underline that this is highly context-dependent and that the exposure time needed may vary widely, which could lead to identifications of flaws more related to user training than to the actual exoskeleton design. Additionally, we have recently reported that training can result in a reduction of kinematic changes observed when using a shoulder exoskeleton (Schrøder Jakobsen et al., Citation2023). None of the abovementioned investigations on familiarization effects on exoskeleton use have been conducted on back supporting exoskeletons (Diamond-Ouellette et al., Citation2022; Moyon et al., Citation2019; Poggensee & Collins, Citation2021; Schrøder Jakobsen et al., Citation2023), leaving the effects of training and in-field use of a passive back exoskeleton still to be demonstrated.
As mentioned earlier, several studies have applied SEMG and kinematic analyses to assess the biomechanical benefits of occupational exoskeleton use, extracting changes in average or peak muscular activity (e.g., Koopman et al., Citation2020; Schmalz et al., Citation2022; Toxiri et al., Citation2019). However, no reported studies have investigated the extent of variation in muscle activity and kinematics, as a measure of changes between peak and minimum activation level or angle (Szeto et al., Citation2009). The extent of variation is suggested to be an important component in ergonomics, as a lack of variability is considered a risk factor for development of WMSDs (Madeleine et al., Citation2008; Mathiassen, Citation2006). Additionally, training has been shown to affect motor variability, which could influence the changes caused in relation to exoskeleton use (Bartlett, Citation2007; Madeleine & Madsen, Citation2009; Madeleine et al., Citation2008).
The aim of the present study was to investigate how biomechanical variation would be affected by a 5-week training period including progressive in-field use of a specific passive back exoskeleton (PBE) at a Danish logistics company. Biomechanical variation was investigated in accordance with Szeto et al. (Citation2009). This approach was used to assess the PBE impact on motor variability, but also to assess the impact on maximum load (90th percentile) and minimum load (10th percentile), which both could be influenced by PBE usage due to the mechanical leverage and weight of the PBE, respectively. Additionally, changes in comfort, acceptance, and usability were monitored. It was hypothesized that familiarization would derive more potential of the PBE as seen in previous studies, and further decrease the peak muscle activity of the lower back (Diamond-Ouellette et al., Citation2022; Moyon et al., Citation2019; Poggensee & Collins, Citation2021). In this case, decreases in the level of muscle activity and movement amplitude would result in decreased extent of biomechanical variation. This study was conducted in prolongation to an already published study (Schrøder Jakobsen et al., Citation2023), in which a similar training protocol was used to investigate the effect of familiarization of a passive shoulder exoskeleton. Several flaws of using the shoulder exoskeleton for logistic MMH were identified, leading to the present research of the PBE as this model was found more suitable for the present work task.
2. Materials and Methods
2.1. Participants
A convenience sample of 20 able-bodied, adult, full-time employed workers, among a total of 50 employees at a Danish wholesale logistics company, volunteered to participate. The daily routine of the workers consisted of order picking, lasting approximately 20–30 min per order. One worker was excluded after enrollment, as he resigned from work during the study. The workers were divided into a control group [CON: n = 10 (3♀/7♂), mean (SD) age = 30.3 (8.2) years, height = 177.9 (12.1) cm, body mass = 81.1 (15.6) kg, working experience 4.9 (5.3) years] and an intervention group [INT: n = 9 (2♀/7♂), age = 29.8 (7.3) years, height = 181.0 (9.9) cm, body mass = 81.8 (13.2) kg, working experience = 5.3 (8.4) years], using stratified randomization with sex, age, and work experience as strata. The workers were all novices using the PBE. However, five workers (two CON and three INT) participated earlier in a similar protocol concerning a shoulder supporting exoskeleton (Schrøder Jakobsen et al., Citation2023). A wash-out period of 20 wk was used to minimize potential carry-over effects, which has been considered sufficient in previous investigations of exoskeleton training (Poritz et al., Citation2019). The study was conducted following approval from the secretariat of The North Denmark Region Committee on Health Research Ethics (LBK nr. 1083), and all workers provided written informed consent as per the guidelines of the committee and the Declaration of Helsinki.
2.2. Exoskeleton Design
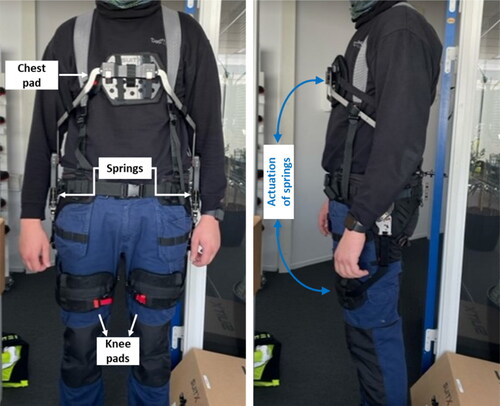
The PBE used in the present study was the BackX-S (Version 3.0, mass: 3.2 kg, SuitX by Ottobock SE & Co. KGaA, Duderstadt, Germany; ). This is a passive, spring-based exoskeleton designed to decrease the extension moment at the L5/S1 joint and the muscle forces of the lower back (Kazerooni et al., Citation2019). The PBE is intended for use in MMH and consists of a harness around the waist and a rigid frame including two pads on each thigh and a pad on the chest. It incorporates a passive torque generation mechanism on each side of the hip joint during forward bending, assisting the trunk extensor muscles (Madinei et al., Citation2020). The PBE can be adjusted in height, depth, width, and waist size to fit user anthropometrics. Additionally, the PBE can function in three modes—one not providing any assistance; one providing support to the user from the start of the bending and for all postures; and one only providing support from 30˚ of forward bending enabling the user to freely walk—making the PBE well-suited for logistics work. The latter was used for the present study, as a change in assistance level is reported less important than training (Poggensee & Collins, Citation2021). The PBE has two levels of support (high and low), with the high setting of support level giving a maximum supporting torque of the springs of approximately 41 Nm (Schwartz et al., Citation2023). Only the high support level was used in the present intervention.
Figure 1. A worker wearing the BackX-S v3.0 (from the frontal and sagittal plane, respectively). Chest and knee pads, and springs are illustrated. Additionally, the directions of actuation of the springs are indicated by blue arrows.
2.3. Study Design
The INT group underwent a training protocol for the PBE with a duration of five weeks, while both groups (INT and CON) took part in weekly workshops concerning occupational ergonomics. The workshop included ergonomic topics on the implementation of mini breaks, stretching pauses, and lifting strategies. The CON group did not wear the PBE during the 5-week intervention. The training was identical to the protocol used in Schrøder Jakobsen et al. (Citation2023), including a 30-min introduction session; a 60-min training session comprising how to don, doff, and maneuver the PBE; and a training period. The training period comprised five weeks of daily use of the PBE by the workers, increasing from 7.5 h/week to a full workweek (37 h/week). The 5-week duration of the protocol was justified by the fact that neural adaptations take place after 4–6 wk (e.g., Vangsgaard et al., Citation2014). An additional description of the training period is given in . Compliance with the training period was self-reported by the workers, by filling out a scheme day-by-day, and was verified by the experimenter present at the test facility (the warehouse) several times a week. The schemes were kept in the exoskeleton storage room.
Table 1. Training protocol.
The workers underwent a pre- and post-test separated by five weeks, in which only the INT group underwent the training protocol. Before initiating the pretest, anthropometric and demographic data were collected for each worker. Workers were allocated one PBE fitted to their anthropometrics by a company representative—the representative did not take part in the research. During the test sessions, the workers performed a series of standardized lifting tasks. The tasks were replications of work scenarios and were based on observations and discussions including industry stakeholders. The lifting tasks consisted of moving boxes from a 15 cm shelf height to a 100 cm truck height. This was done in a 180˚ rotational movement, as the truck was located behind the worker (). The lifting task was done with three different boxes: paper cups, margarine, and wine. Additional descriptions including the dimensions of each box are given in . Both groups performed each lift four times with and without wearing the PBE for assistance. The tasks were conducted in a randomized order during the pretest and were performed in the same sequence for the post-test for the specific worker. The workers received no instruction on how to lift, but to do it in a controlled manner as close as possible to normal.
Figure 2. Snapshots of a worker lifting a box from a shelf (height = 15 cm) to a truck (height = 100 cm) during one of the test sessions wearing the measurement hardware (surface electromyography and kinematics assessments) and the passive back exoskeleton. The figure illustrates the movement of the task chronologically from left to right.

Table 2. Descriptions of the work tasks in the test sessions. Specification of the items (mass and dimensions).
2.4. Surface Electromyography
SEMG was recorded during the test sessions using wireless amplifiers (Telemyo DTS, Noraxon USA Inc., Scottsdale USA) with a sampling frequency of 1500 Hz. Surface electrodes (Neuroline 720 72000-S/25 type, AMBU, Ballerup, Denmark) were placed over the muscles with an inter-electrode distance of 2 cm on abraded ethanol-cleaned skin along the direction of the muscle fibers. SEMGs of the erector spinae longissimus (ES) and lower trapezius (LT) were recorded bilaterally. The electrodes recording the ES muscles were placed two finger-widths laterally from the proc. spin of L1, while the electrodes recording the LT muscles were placed 2/3 along the line from the trigonum spinae to the 8th thoracic vertebra. The placement of the electrodes were conducted according to SENIAM recommendations (Hermens et al., Citation1999). These muscles were examined to get an estimate of the muscle activity of the lower and upper back, respectively. Additionally, the upper trapezius was chosen to examine a potential side effect of using the PBE, in terms of the user carrying the box further from the body, causing an increased moment leading to a higher muscular demand. After placing the electrodes on the skin covering the relevant muscles, the signals were visually inspected before a series of normalization tasks were initiated to assess the maximum isometric voluntary contractions (MVC). For estimating the MVC of the ES, the workers performed an upper trunk extension on a massage table against resistance provided by the researcher, while having their legs fixed to the table by inextensible straps. The workers performed the trunk extension isometrically in a prone position in accordance with Vera-Garcia et al. (Citation2010). For estimating the MVC of the LT, the workers performed an arm raise above the head as resistance was applied above the elbow from the researcher, with the subject in a prone position on the massage table in accordance with Ekstrom et al. (Citation2005). Each MVC task was performed three times with a duration of three-seconds, separated by one minute of rest to avoid fatigue development (Stephens & Taylor, Citation1972).
2.5. Kinematics
The joint angles of the workers were estimated during the test sessions using an inertial motion capture setup (Xsens Awinda hardware, Xsens Technologies BV, Enschede, The Netherlands). A total of 17 strap-based inertial measurement units (IMUs), sampled at 60 Hz, were attached to different segments of the body according to pre-established guidelines. The IMUs drove a 23-segmentsmodel enabling a full-body kinematic analysis. Before initiating the recordings, the model was scaled individually to the worker based on the previously measured anthropometrics. After scaling the model and mounting of the equipment, the system was calibrated prior to the lifting tasks.
2.6. Perceived Effort and Exoskeleton Evaluation
Ratings of perceived exertion (RPE) were estimated during the test sessions using a Borg CR10 scale as a measure of perceived effort. The workers rated each lifting task conducted in the test sessions with and without the use of the PBE. Furthermore, usability, comfort, and acceptance of the PBE were examined using the 16-statement, 7-point Likert scale, Questionnaire for the Evaluation of Physical Assistive Devices (QUEAD) filled in by the workers after each test session (Schmidtler et al., Citation2017). The QUEAD was translated into the native tongue of the workers using published guidelines (Tsang et al., Citation2019).
2.7. Data Analysis
SEMG and kinematic data were processed using a customized MATLAB script (Version R2021b, The MathWorks, Natick, MA, USA). The full wave SEMG signals were detrended, rectified, and filtered (Butterworth bandpass filter [10–500 Hz]), before applying a 50 ms moving average window. The SEMG signals recorded during the lifting tasks were normalized to the maximal SEMG signals recorded during MVCs of the respective muscle. The full sequence of the signal was segmented to the actual movement of the work task using the kinematic data. The 10th and 90th percentiles of the SEMG amplitude were calculated from the fully processed signals to estimate the effects of the PBE at low and high efforts of the work task, respectively. The 90th–10th percentile range was calculated to represent the extent of variation in muscle activity during the work task (Szeto et al., Citation2009).
Kinematic data were initially processed in Xsens MVN Analyze 2021.0.1 software using the HD Reprocessing Engine, before further processing in MATLAB. The signal was segmented to the actual movement of the work task in accordance with the SEMG signals before extracting the relevant variables. Forward trunk-bending with respect to the vertical axis and bilateral knee flexion (the angle between the thigh and shin segments) were analyzed to examine the impact of the PBE on the user’s lifting strategy (changes in squat/stoop lifting). Additionally, trunk axial rotation with respect to the pelvis (cumulative T8-S1) was analyzed to investigate whether the PBE added restrictions to the range of motion (ROM) of the trunk. Finally, shoulder flexion (the anterior angle of the upper arm segment in relation to the trunk) was analyzed bilaterally to examine whether the PBE forced the user to handle the box further from the body, which could affect the effort required for the work task. The 10th percentile, 90th percentile, and the 90th–10th percentile range were calculated similar to the SEMG data.
Questions in the QUEAD were divided into clusters of (1) perceived usefulness, (2) perceived ease of use, (3) emotions, (4) attitude, and (5) comfort based on a pre-established procedure (Schmidtler et al., Citation2017). The RPE values were not further processed.
2.8. Statistical Analysis
Statistical analysis was performed in SPSS version 26 (IBM corp., Armonk, NY, USA). Normality and sphericity were assessed using Shapiro-Wilk tests and Mauchly’s sphericity test, respectively. All dependent variables were found to be normally distributed and the variances to be equal, thus parametric statistical tests were used. A two-way, repeated measures, multivariate analysis of variance (2RM-MANOVA) was conducted to assess the effects of exoskeleton use and training within and between the INT and CON group. The 2RM-MANOVA was conducted with multiple dependent variables (SEMG amplitude, joint angle amplitude, and RPE), and PBE use (EXO/NoEXO) and training (Pre/Post) as independent factors. The clusters of the QUEAD scores were analyzed with training as the only independent factor. Additionally, the relationship between age and BMI and QUEAD scores were analyzed using Pearson correlation coefficients (r). The multivariate design was used to reduce the number of statistical tests conducted and thereby to avoid inflating family-wise error (accumulation of type I error). All statistical tests were performed with an alpha-level <.05. Partial eta squared (ƞ2) was extracted as a measure of effect size (Richardson, Citation2011).
3. Results
3.1. Compliance to the Use of the Passive Back Exoskeleton
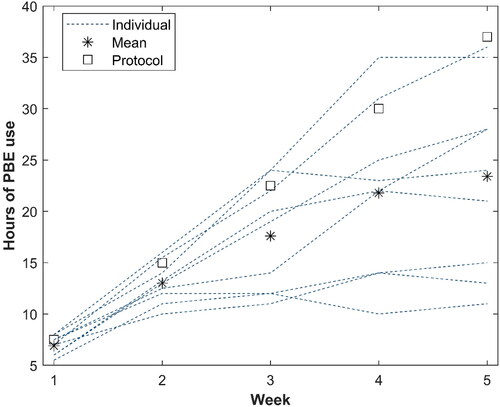
The day-by-day reports of the workers PBE use revealed a total mean (SD) compliance rate of 73.9 (21.5) %, equivalent to 82.8 (24.1) h. Deviations from the protocol (consisting of 112 h of total PBE use) were partly due to sickness leave and special work tasks, like seated truck driving, not justifying the use of the PBE. The individual and mean reported PBE use of the INT group are shown in .
Figure 3. Mean and individual self-reported PBE use during the 5-week training period (n = 9). Additionally, the intended use stated in the training protocol is included.
3.2. Muscle Activity
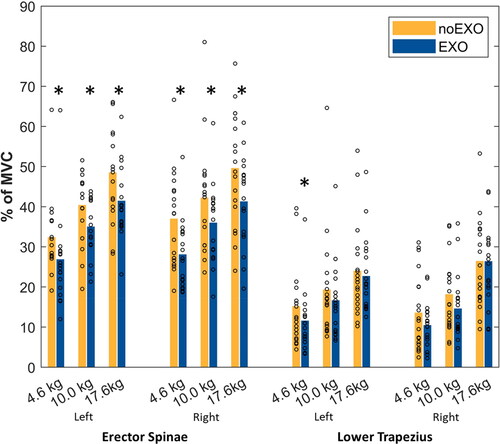
The 2RM-MAVONA revealed no significant effects of PBE assistance on the 10th percentile of the SEMG amplitude of the muscles (see supplemental online material). However, significant decreases in the 90th percentile of the SEMG amplitude were revealed, leading also to a significant decrease in the 90th–10th percentile difference across all the lifting conditions of the left (4.6 kg; p <.001, ƞ2 = 0.780, 10.0 kg; p <.001, ƞ2 = 0.632, 17.6 kg; p = .002, ƞ2 = 0.522) and right erector spinae (4.6 kg; p <.001, ƞ2 = 0.579, 10.0 kg; p = .001, ƞ2 = 0.565, 17.6 kg; p = .001, ƞ2 = 0.583). Additionally, decreased muscle activity was revealed at the left lower trapezius during the 4.6 kg (p = .039, ƞ2 = 0.308) when using the PBE ().
Figure 4. Mean and individual values of the 90th–10th percentile difference in SEMG amplitude of left/right erector spinae and lower trapezius during noEXO/EXO conditions (n = 19). *Indicates significant differences (α <.05).
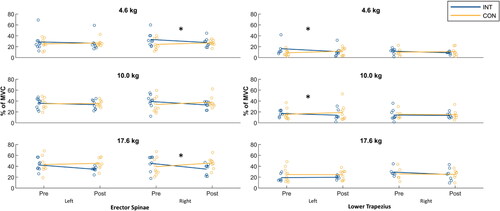
The 2RM-MANOVA revealed no significant interaction between PBE assistance and training in the 10th percentile of SEMG amplitude (see additional online material). However, significant decreases were revealed in the 90th percentile of the SEMG amplitude during the post-test for the INT group, leading again to significant decreases in the 90th–10th percentile difference at the right erector spinae during the 4.6 kg (p = .016, ƞ2 = 0.327) and 17.6 kg lifts (p = .015, ƞ2 = 0.376). Additionally, decreased muscle activity was revealed at the left lower trapezius at 4.6 kg (p = .003, ƞ2 = 0.535) and 10.0 kg lift (p = .021, ƞ2 = 0.369) ().
Figure 5. Mean and individual values of the 90th–10th percentile difference in SEMG amplitude of left/right erector spinae and lower trapezius of CON (n = 10) and INT (n = 9) group during EXO condition from the pre/post-tests. *Indicates significant differences (α <.05).
3.3. Kinematics
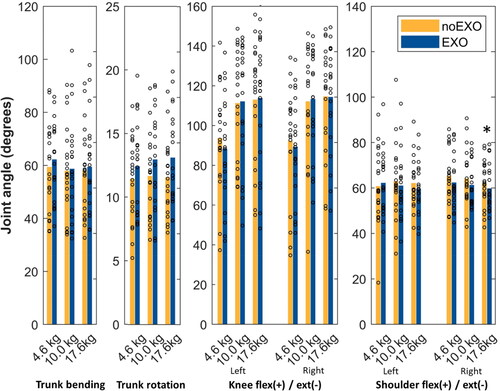
The 2RM-MANOVA revealed no significant effects of PBE assistance in the 10th percentile of the joint angles (see additional online material). A significant decrease in the 90th percentile of the right shoulder flexion led to a significant effect at the in the 90th–10th percentile difference (p = 0.015, ƞ2 = 0.316) when using the PBE during the 17.6 kg lift ().
Figure 6. Mean and individual values of the 90th–10th percentile difference in joint angles of trunk bending, rotation, and left/right knee and shoulder flexion/extension during noEXO/EXO conditions (n = 19). *Indicates significant differences (α <.05).
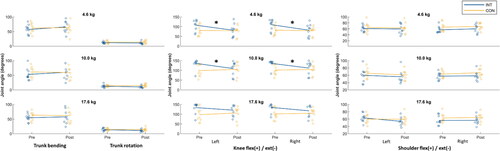
The 2RM-MANOVA revealed no significant interaction between PBE assistance and training in the 10th percentile of the joint angles (see additional online material). However, significant decreases were revealed in the 90th percentile knee flexion during the post-test for the INT group, leading to significant decreases in the 90th–10th percentile difference of left and right knee flexion for the INT group at 4.6 kg (left: p = .021, ƞ2 = 0.290, right, p = .016, ƞ2 = 0.312) and 10.0 kg lifts (left: p = .030, ƞ2 = 0.261, right: p = .034, ƞ2 = 0.261) ().
Figure 7. Mean and individual values of the 90th–10th percentile difference in joint angles of trunk bending and rotation, left/right knee, and shoulder flexion/extension of CON (n = 10) and INT (n = 9) group during EXO condition from the pre/post-tests. *Indicates significant differences (α <.05).
3.4. Perceived effort and PBE Evaluation
The 2RM-MANOVA revealed significant decreases of the RPE across all lifts (4.6 kg; p = .001, ƞ2 = 0.532, 10.0 kg; p <.001, ƞ2 = 0.754, 17.6 kg; p <.001, ƞ2 = 0.791) when using the PBE (). No interaction between PBE use and training was found (). The 2RM-MANOVA revealed no effect of training on either perceived usefulness, perceived ease of use, emotions, attitude, or comfort (). The correlation analysis revealed a significant negative correlation between age and emotions toward the PBE (r = −0.502, p = .028) and perceived ease of use (r = −0.531, p = .019).
Figure 8. A: Mean and individual values of the rated perceived exertion (RPE) during noEXO/EXO conditions (n = 19). *Indicates significant differences (α <.05). B: Mean and individual values of the rated perceived exertion (RPE) of CON (n = 10) and INT (n = 9) group during EXO condition from the pre/post-tests. *Indicates significant differences (α <.05).
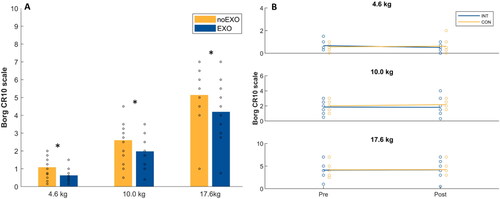
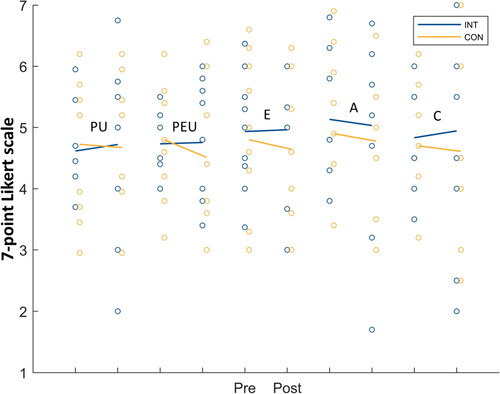
Figure 9. Mean and individual values of the Questionnaire for the Evaluation of Physical Assistive Devices (QUEAD) Likert-scale ratings. Pre/Post training ratings of perceived usefulness (PU), perceived ease of use (PEU), emotions (E), attitude (A), and comfort (C), are included for the intervention (INT, n = 9) and control group (CON, n = 10).
4. Discussion
4.1. Acceptance of a Passive Back Exoskeleton among Workers
The design of the present study was identical to the one used in Schrøder Jakobsen et al. (Citation2023), where a passive shoulder supporting exoskeleton was examined. However, compliance to PBE use in the present study was significantly higher than what was observed earlier. The contrast of the two exoskeletons is not only evidenced by the compliance rate, but also in terms of perceived usefulness, attitude, and comfort. The PBE received mean ratings between 4.7 and 5.2 (), equivalent to slight positivity toward the exoskeleton. The shoulder exoskeleton was rated lower when using the same survey (Schrøder Jakobsen et al., Citation2023). Potential reasons for the low compliance and usability ratings were given in Schrøder Jakobsen et al. (Citation2023), for example the shoulder exoskeleton not being suitable for the task, and the extra layer causing restrictions of movement and heat issues, leading to discomfort. Despite the heat issue, the remaining drawbacks were not present when using the PBE, underlining the overall indication that this PBE is more suitable for logistics work than the passive shoulder exoskeleton previously tested in this company. The PBE in the present study was chosen because of the free walking possibility for the users. However, it cannot be excluded that comparisons to other passive or active back supporting exoskeleton models from other brands might have led to different conclusions. The results illustrated that the users differed in terms of acceptance of the PBE (). Thus, even though the PBE received a relatively positive rating, the opinions toward exoskeleton use still varies on an individual level. By investigating the relationship between demographic/anthropometric data and the PBE ratings of the workers, we found that age was negatively correlated to both emotions toward the PBE and perceived ease of use. These findings might illustrate an age barrier to be considered, indicating that implementation of occupational exoskeleton might be easier to realize among younger workers.
4.2. Immediate Effects of Passive Back Exoskeleton Assistance
In agreement with laboratory investigations, PBE assistance successfully reduced the peak muscle activity of the back musculature when performing standardized MMH tasks, indicated by the significant changes and underlined by the large effect sizes revealed in the statistical analysis (e.g., Kazerooni et al., Citation2019). As seen in , this was supported by decreased ratings of perceived exertion, indicating the beneficial effects of the PBE in terms of reducing the biomechanical load of the workers when performing logistics work. The decreased SEMG amplitude of the 90th percentile along the unaltered amplitude of the 10th percentile resulted in decreased variation in the work tasks (). Variations in motor control strategies are reflecting motor learning as well as neural adaptability and flexibility aiming at performing the motor task in an optimal way (Faisal et al., Citation2008; Stergiou & Decker, Citation2011). Research points at a lack of variation as a risk factor for the development of WMSDs, which could be a drawback of using the PBE (Madeleine et al., Citation2008; Mathiassen, Citation2006). Yet, decreased variation was only seen at the SEMG amplitude and not in the actual movement variability derived from the kinematics (), underlining variability tradeoffs between macroscopic and microscopic levels of a system (Bar-Yam, Citation2004). Thus, our findings suggest that PBE usage does not reduce the range of motion variation in the back and knees. Rather, it solely diminishes the muscular variability of the workers by decreasing peak activity levels. This underlines the benefits of the PBE in terms of reducing the muscular load of the back without causing lower variation of the movement pattern, which indicates that the use of the PBE could have a positive impact on the risk of developing WMSDs.
4.3. Effects of Training on the Assistance of a Passive Back Exoskeleton
The present study used a training approach inducing progressive PBE use over a 5-week training regimen to derive neural adaptations (Vangsgaard et al., Citation2014). In line with the hypothesis, the results indicated positive effects of the training approach as decreases in muscle activity of both erector spinae and lower trapezius were revealed for the INT group at post-testing (). Additionally, a slightly more stooped lifting technique was preferred by the INT group post training (i.e., significant reductions in knee flexion when lifting 4.6 and 10.0 kg). In fact, this change in technique was further supported by a tendency of increased forward trunk bending. In the present study, the workers showed a tendency to use a more stoop lifting technique when handling lighter boxes, compared with heavier boxes where a more squat-like technique was preferred, as indicated by larger knee flexion and lower forward trunk bending. Thus, the explanation behind the changes in lifting technique could be due to the decreased perceived exertion, driving the workers toward their preferred technique for lighter lifting. Additionally, evidence suggests that stoop lifting is often preferred during repetitive lifting to avoid fatigue development, which could also advocate for the change in lifting technique (van Dieën et al., Citation1999). Note that the literature does not provide support for one technique over another in terms of preventing low back pain (Burgess-Limerick, Citation2003; Straker, Citation2003; van Dieën et al., Citation1999).
These findings are in line with recent evidence that suggests that exoskeleton training can derive optimized exoskeleton use and underlines the importance of including a training protocol as a part of implementation (Diamond-Ouellette et al., Citation2022; Poggensee & Collins, Citation2021). Additionally, it supports the criticisms of assessing the effects of acute exoskeleton use without considering adaptational changes, as potential identified flaws could be related to a lack of training rather than the actual exoskeleton design (Poggensee & Collins, Citation2021). The present study demonstrates that five weeks progressive use of a PBE changed the biomechanics of lifting in MMH. The observed biomechanical adaptations can be seen as a favorable trait. However, long-term effects are not clarified making longitudinal studies warranted.
4.4. Methodological Considerations
Firstly, this study only assessed the effect of the PBE in a specific standardized setup. Even though the test sessions were performed in field settings, the results might not be generalizable to warehouse MMH in general, which include more complex and awkward movements (Punnett & Wegman, Citation2004). Secondly, blinding of the workers was obviously not possible due to the physical appearance of the exoskeleton. Although the workers received information to conduct the lift as close to how they do it in their daily work, this might have affected the lifting technique of the workers during the test sessions. Thirdly, unobstructive sensors were chosen to enable in-field measurements, even though drifting over time can be an issue (Skals et al., Citation2021a; Skals et al., Citation2021b). Fourthly, other more thorough methods of assessing variability exist, e.g., calculations of the entropy measures and Lyapunov exponents (Baida et al., Citation2018). Yet, the 90th–10th percentile difference has earlier been used to assess ergonomic variation (Szeto et al., Citation2009). Finally, five of the workers participating in the study took part in an earlier exoskeleton intervention (Schrøder Jakobsen et al., Citation2023). Even if the two studies were separated by a wash-out period of 20 wk and used different exoskeleton models, we cannot completely exclude any carry over effects.
5. Conclusions
The present study demonstrated that the use of a PBE reduced back muscle activity variation. No change in kinematics variation was observed underlining that the decrease only occurred at a muscular level without restricting the overall movement variation. The decrease in variation of muscle activity was driven by reduced peak muscle activity, highlighting a positive effect of using a passive back exoskeleton in logistics manual materials handling. The current results suggest potential benefits of exoskeleton training in terms of performance enhancement, as a five-week training period optimized the effect of the PBE by further reducing the peak in muscle activity of the back muscles. Kinematic changes were observed as a training effect, as the workers performed a more stoop lifting technique post training. However, this is not identified as a drawback, as it may reflect preference in the motor repertoire of the workers. These results show that training can help optimize human-exoskeleton interaction by deriving more potential benefits of exoskeleton use, which underlines the importance of introducing training when implementing exoskeleton in industry. Furthermore, it also indicates assistance of the passive back exoskeleton to be beneficial to logistics manual materials handling, even though longitudinal studies are warranted.
Supplemental Material
Download PDF (1.4 MB)Acknowledgements
The authors are grateful to the workers who volunteered for the research.
Conflict of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Additional information
Funding
References
- Baida, S. R., Gore, S. J., Franklyn-Miller, A. D., & Moran, K. A. (2018). Does the amount of lower extremity movement variability differ between injured and uninjured populations? A systematic review. Scandinavian Journal of Medicine & Science in Sports, 28(4), 1320–1338. https://doi.org/10.1111/sms.13036
- Baldassarre, A., Lulli, L. G., Cavallo, F., Fiorini, L., Mariniello, A., Mucci, N., & Arcangeli, G. (2022). Industrial exoskeletons from bench to field: Human-machine interface and user experience in occupational settings and tasks. Frontiers in Public Health, 10, 1039680. https://doi.org/10.3389/fpubh.2022.1039680
- Bär, M., Steinhilber, B., Rieger, M. A., & Luger, T. (2021). The influence of using exoskeletons during occupational tasks on acute physical stress and strain compared to no exoskeleton–A systematic review and meta-analysis. Applied Ergonomics, 94, 103385. https://doi.org/10.1016/j.apergo.2021.103385
- Bartlett, R. (2007). Movement coordination and movement variability. Sports Biomechanics, 6(2), 119–120. https://doi.org/10.1080/14763140701400931
- Bar-Yam, Y. (2004). Multiscale complexity/entropy. Advances in Complex Systems, 7(01), 47–63. https://doi.org/10.1142/S0219525904000068
- Bendix, T. (2006). Physical exercises and low back pain. Scandinavian Journal of Medicine & Science in Sports, 16(4), 217–218. https://doi.org/10.1111/j.1600-0838.2006.00576.x
- Buchbinder, R., van Tulder, M., Öberg, B., Costa, L. M., Woolf, A., Schoene, M., & Croft, P. (2018). Low back pain: A call for action. Lancet, 391(10137), 2384–2388. https://doi.org/10.1016/S0140-6736(18)30488-4
- Burgess-Limerick, R. (2003). Squat, stoop, or something in between? International Journal of Industrial Ergonomics, 31(3), 143–148. https://doi.org/10.1016/S0169-8141(02)00190-7
- Crea, S., Beckerle, P., De Looze, M., De Pauw, K., Grazi, L., Kermavnar, T., Masood, J., O’Sullivan, L. W., Pacifico, I., Rodriguez-Guerrero, C., Vitiello, N., Ristić-Durrant, D., & Veneman, J. (2021). Occupational exoskeletons: A roadmap toward large-scale adoption. Methodology and challenges of bringing exoskeletons to workplaces. Wearable Technologies, 2, e11. https://doi.org/10.1017/wtc.2021.11
- Da Costa, B. R., & Vieira, E. R. (2010). Risk factors for work-related musculoskeletal disorders: A systematic review of recent longitudinal studies. American Journal of Industrial Medicine, 53(3), 285–323. https://doi.org/10.1002/ajim.20750
- De Kok, J., Vroonhof, P., Snijders, J., Roullis, G., Clarke, M., & Peereboom, K. (2019). Work-related musculoskeletal disorders: Prevalence, costs and demographics in the EU. European Agency for Safety and Health at Work.
- de Looze, M. P., Bosch, T., Krause, F., Stadler, K. S., & O’Sullivan, L. W. (2016). Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics, 59(5), 671–681. https://doi.org/10.1080/00140139.2015.1081988
- Diamond-Ouellette, G., Telonio, A., Karakolis, T., Leblond, J., Bouyer, L. J., & Best, K. L. (2022). Exploring the change in metabolic cost of walking before and after familiarization with a passive load-bearing exoskeleton: A case series. IISE Transactions on Occupational Ergonomics and Human Factors, 10(3), 161–172. https://doi.org/10.1080/24725838.2022.2124325
- Ekstrom, R. A., Soderberg, G. L., & Donatelli, R. A. (2005). Normalization procedures using maximum voluntary isometric contractions for the serratus anterior and trapezius muscles during surface EMG analysis. Journal of Electromyography and Kinesiology, 15(4), 418–428. https://doi.org/10.1016/j.jelekin.2004.09.006
- Faisal, A. A., Selen, L. P., & Wolpert, D. M. (2008). Noise in the nervous system. Nature Reviews Neuroscience, 9(4), 292–303. https://doi.org/10.1038/nrn2258
- Govaerts, R., Tassignon, B., Ghillebert, J., Serrien, B., De Bock, S., Ampe, T., El Makrini, I., Vanderborght, B., Meeusen, R., & De Pauw, K. (2021). Prevalence and incidence of work-related musculoskeletal disorders in secondary industries of 21st century Europe: A systematic review and meta-analysis. BMC Musculoskeletal Disorders, 22(1), 751. https://doi.org/10.1186/s12891-021-04615-9
- Hermens, H. J., Freriks, B., Merletti, R., Stegeman, D., Blok, J., Rau, G., Disselhorst-Klug, C., & Hägg, G. (1999). European recommendations for surface electromyography. Roessingh Research and Development, 8(2), 13–54.
- James, S. L., Abate, D., Abate, K. H., Abay, S. M., Abbafati, C., Abbasi, N., Abbastabar, H., Abd-Allah, F., Abdela, J., Abdelalim, A., and Abdollahpour, I. (2018). Global, regional, and national incidence, prevalence, and years lived with disability for 354 diseases and injuries for 195 countries and territories, 1990–2017: A systematic analysis for the Global Burden of Disease Study 2017. Lancet, 392(10159), 1789–1858. https://doi.org/10.1016/S0140-6736(18)32279-7
- Kazerooni, H., Tung, W., & Pillai, M. (2019). Evaluation of trunk-supporting exoskeleton. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, (Vol. 63, No. 1, pp. 1080–1083). SAGE Publications. https://doi.org/10.1177/1071181319631261
- Koopman, A. S., Kingma, I., de Looze, M. P., & van Dieën, J. H. (2020). Effects of a passive back exoskeleton on the mechanical loading of the low-back during symmetric lifting. Journal of Biomechanics, 102, 109486. https://doi.org/10.1016/j.jbiomech.2019.109486
- Madeleine, P., & Madsen, T. M. T. (2009). Changes in the amount and structure of motor variability during a deboning process are associated with work experience and neck–shoulder discomfort. Applied Ergonomics, 40(5), 887–894. https://doi.org/10.1016/j.apergo.2008.12.006
- Madeleine, P., Mathiassen, S. E., & Arendt-Nielsen, L. (2008). Changes in the degree of motor variability associated with experimental and chronic neck–shoulder pain during a standardised repetitive arm movement. Experimental Brain Research, 185(4), 689–698. https://doi.org/10.1007/s00221-007-1199-2
- Madeleine, P., Voigt, M., & Mathiassen, S. E. (2008). The size of cycle-to-cycle variability in biomechanical exposure among butchers performing a standardised cutting task. Ergonomics, 51(7), 1078–1095. https://doi.org/10.1080/00140130801958659
- Madinei, S., Alemi, M. M., Kim, S., Srinivasan, D., & Nussbaum, M. A. (2020). Biomechanical evaluation of passive back-support exoskeletons in a precision manual assembly task: “Expected” effects on trunk muscle activity, perceived exertion, and task performance. Human Factors, 62(3), 441–457.
- Mathiassen, S. E. (2006). Diversity and variation in biomechanical exposure: What is it, and why would we like to know? Applied Ergonomics, 37(4), 419–427. https://doi.org/10.1016/j.apergo.2006.04.006
- Moyon, A., Petiot, J. F., & Poirson, E. (2019). Investigating the effects of passive exoskeletons and familiarization protocols on arms-elevated tasks. In Human Factors and Ergonomics Society Europe Chapter 2019 Annual Conference.
- Nussbaum, M. A., Lowe, B. D., de Looze, M., Harris-Adamson, C., & Smets, M. (2019). An introduction to the special issue on occupational exoskeletons. IISE Transactions on Occupational Ergonomics and Human Factors, 7(3-4), 153–162. https://doi.org/10.1080/24725838.2019.1709695
- Poggensee, K. L., & Collins, S. H. (2021). How adaptation, training, and customization contribute to benefits from exoskeleton assistance. Science Robotics, 6(58), eabf1078. https://doi.org/10.1126/scirobotics.abf1078
- Poliero, T., Fanti, V., Sposito, M., Caldwell, D. G., & Di Natali, C. (2022). Active and passive back-support exoskeletons: A comparison in static and dynamic tasks. IEEE Robotics and Automation Letters, 7(3), 8463–8470. https://doi.org/10.1109/LRA.2022.3188439
- Poritz, J. M., Taylor, H. B., Francisco, G., & Chang, S. H. (2019). User satisfaction with lower limb wearable robotic exoskeletons. Disability and Rehabilitation Assistive Technology, 15(3), 322–327. https://doi.org/10.1080/17483107.2019.1574917
- Punnett, L., & Wegman, D. H. (2004). Work-related musculoskeletal disorders: The epidemiologic evidence and the debate. Journal of Electromyography and Kinesiology, 14(1), 13–23. https://doi.org/10.1016/j.jelekin.2003.09.015
- Richardson, J. T. (2011). Eta squared and partial eta squared as measures of effect size in educational research. Educational Research Review, 6(2), 135–147. https://doi.org/10.1016/j.edurev.2010.12.001
- Schmalz, T., Colienne, A., Bywater, E., Fritzsche, L., Gärtner, C., Bellmann, M., Reimer, S., & Ernst, M. (2022). A passive back-support exoskeleton for manual materials handling: Reduction of low back loading and metabolic effort during repetitive lifting. IISE Transactions on Occupational Ergonomics and Human Factors, 10(1), 7–20.
- Schmidtler, J., Bengler, K., Dimeas, F., & Campeau-Lecours, A. (2017). A questionnaire for the evaluation of physical assistive devices (quead): Testing usability and acceptance in physical human-robot interaction. In 2017 IEEE International Conference on Systems, Man, and Cybernetics (Smc) (pp. 876–881). IEEE.
- Schrøder Jakobsen, L., de Zee, M., Samani, A., Desbrosses, K., & Madeleine, P. (2023). Biomechanical changes, acceptance, and usability of a passive shoulder exoskeleton in manual material handling. A field study. Applied Ergonomics, 113, 104104. https://doi.org/10.1016/j.apergo.2023.104104
- Schwartz, M., Desbrosses, K., Theurel, J., & Mornieux, G. (2023). Biomechanical consequences of using passive and active back-support exoskeletons during different manual handling tasks. International Journal of Environmental Research and Public Health, 20(15), 6468. https://doi.org/10.3390/ijerph20156468
- Skals, S., Bláfoss, R., Andersen, L. L., Andersen, M. S., & de Zee, M. (2021a). Manual material handling in the supermarket sector. Part 2: Knee, spine and shoulder joint reaction forces. Applied Ergonomics, 92, 103345. https://doi.org/10.1016/j.apergo.2020.103345
- Skals, S., Bláfoss, R., Andersen, M. S., Andersen, M. S., & de Zee, M. (2021b). Manual material handling in the supermarket sector. Part 1: Joint angles and muscle activity of trapezius descendens and erector spinae longissimus. Applied Ergonomics, 92, 103340. https://doi.org/10.1016/j.apergo.2020.103340
- Stephens, J. A., & Taylor, A. (1972). Fatigue of maintained voluntary muscle contraction in man. The Journal of Physiology, 220(1), 1–18. https://doi.org/10.1113/jphysiol.1972.sp009691
- Stergiou, N., & Decker, L. M. (2011). Human movement variability, nonlinear dynamics, and pathology: Is there a connection? Human Movement Science, 30(5), 869–888. https://doi.org/10.1016/j.humov.2011.06.002
- Straker, L. (2003). Evidence to support using squat, semi-squat and stoop techniques to lift low-lying objects. International Journal of Industrial Ergonomics, 31(3), 149–160. https://doi.org/10.1016/S0169-8141(02)00191-9
- Szeto, G. P. Y., Straker, L. M., & O’Sullivan, P. B. (2009). Examining the low, high and range measures of muscle activity amplitudes in symptomatic and asymptomatic computer users performing typing and mousing tasks. European Journal of Applied Physiology, 106(2), 243–251. https://doi.org/10.1007/s00421-009-1019-4
- Toxiri, S., Näf, M. B., Lazzaroni, M., Fernández, J., Sposito, M., Poliero, T., Monica, L., Anastasi, S., Caldwell, D.G., & Ortiz, J. (2019). Back-support exoskeletons for occupational use: An overview of technological advances and trends. IISE Transactions on Occupational Ergonomics and Human Factors, 7(3-4), 237–249. https://doi.org/10.1080/24725838.2019.1626303
- Tsang, S., Royse, C. F., & Terkawi, A. S. (2019). Guidelines for developing, translating, and validating a questionnaire in perioperative and pain medicine. Saudi Journal of Anaesthesia, 11(Suppl 1), S80–S89. https://doi.org/10.4103/sja.SJA_203_17
- van Dieën, J. H., Hoozemans, M. J., & Toussaint, H. M. (1999). Stoop or squat: A review of biomechanical studies on lifting technique. Clinical Biomechanics, 14(10), 685–696. https://doi.org/10.1016/S0268-0033(99)00031-5
- Vangsgaard, S., Taylor, J. L., Hansen, E. A., & Madeleine, P. (2014). Changes in H reflex and neuromechanical properties of the trapezius muscle after 5 weeks of eccentric training: A randomized controlled trial. Journal of Applied Physiology, 116(12), 1623–1631. https://doi.org/10.1152/japplphysiol.00164.2014
- Vera-Garcia, F. J., Moreside, J. M., & McGill, S. M. (2010). MVC techniques to normalize trunk muscle EMG in healthy women. Journal of Electromyography and Kinesiology, 20(1), 10–16. https://doi.org/10.1016/j.jelekin.2009.03.010