
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper, a numerical solution of the coupled Burgers' equations based on septic B-spline collocation method is presented. The scheme is based on the Crank–Nicolson formulation for time integration and septic B-spline functions for space integration. The method has been showed unconditionally stable by using Von-Neumann technique. The efficiency of this method is demonstrated by applying two test problems. The obtained numerical results are found in a good agreement with the exact solution. This method is efficient, powerful, and economical. It can also applicable to other linear and nonlinear partial differential equations.
1. Introduction
The coupled Burger equations originally derived by Esipov to study the model of polydisperse sedimentation (Esipov, Citation1995). It's a simple model of sedimentation or evolution of scaled volume concentrations of two kinds of particles in fluid suspensions and colloids, under the effect of gravity (Nee and Duan, Citation1998).
The study of Burger equations have an important tasks for the system describes various kinds of physical phenomena, such as a mathematical model of turbulence, traffic, and the approximate theory of flow through a shock wave travelling in viscous fluid (Burger, Citation1948; Cole, Citation1951). Therefore many techniques have been proposed to obtain analytical and numerical solutions for one dimensional coupled Burgers equations, for example, a modified extended tanh-function method (Soliman, Citation2006), adomian decomposition method (Kaya, Citation2001), variational iteration method (Abdou and Soliman, Citation2005), and a conjugate filter approach (Wei and Gu, Citation2002). Esipov has gave numerical solutions and comparisons (Esipov, Citation1995). The Fourier pseudo-spectral method (Rashid and Ismail, Citation2009), Chebyshev spectral collocation method (Khater et al., Citation2008), adomin-pade technique (Deghan et al., Citation2007), fully implicit and Crank-Nicolson schemes (Srivastava et al, Citation2013; Srivastava et al, Citation2013). Implicit logarithmic finite-difference method (Srivastava et al, Citation2014), and collocation of local radial basis functions (Islam et al., Citation2012). For more about Burgers' equation see (Bonkile et al., Citation2018; Lashkarian et al., Citation2019; Pana et al., Citation2018; Prakasha et al., Citation2015; Shi et al., Citation2017; Wang and Kara, Citation2018; Karakoc et al., Citation2014).
Spline functions theory is very active field of approximate theory in partial differential equations. Many researchers have proposed numerical solution for the nonlinear equations including Burger equations, such as, Galerkin B-Spline-collocation method (Bryan et al., Citation2017), exponential cubic B-spline differential quadrature method (Korkmaz and Akmaz, Citation2015), trigonometric cubic B-spline differential quadrature method (Korkmaz and Akmaz, Citation2018), cubic B-spline collocation method (Sharifi and Rashidinia, Citation2016), B-spline collocation and self-adapting differential evolution (jDE) algorithm (Luo et al., Citation2018), fourth-order cubic B-spline collocation method (Rohila and Mittal, Citation2018), cubic B-spline collocation scheme (Mittal and Arora, Citation2011), non-polynomial spline method (Ali et al., Citation2015), collocation method with cubic trigonometric B-spline (Raslan et al., Citation2016), collocation method with quintic B-spline method (Raslan et al., Citation2017), generalized differential quadrature method (Mokhtari et al., Citation2011), exponential cubic B-spline finite element method (Ersoy and Dag, Citation2015), B-spline Differential Quadrature Method (Bashan et al., Citation2015), and the Galerkin quadratic B-spline finite element method (Kutluay and Ucar, Citation2013). The septic B-spline approach has been used to establish approximate solutions for several partial differential equations (Ramadan et al., Citation2005; El-Danaf, Citation2008; Soliman and Hussien, Citation2005; Quarteroni et al., Citation2007; Karakoc and Zeybek, Citation2016; Geyikli and Karakoc, Citation2011).
The organization of this paper is as follows. In Section 2, septic B-spline collocation method is described. In Section 3 and 4, the collocation method is explained and applied to the coupled Burger equations. In Section 5, the stability analysis of the method is discussed. In Section 6, two numerical test problems is presented and discussed. Section 7 concludes the paper.
2. Septic B-spline collocation method
Consider a mesh as a uniform partition of the solution domain
with
The septic B-spline basis functions
at knots
given as below:
(1)
(1)
where
forms a basis over the region
Each septic B-spline covers eight elements so that an element is covered by eight septic B-splines.
3. Solution of coupled burger equations
The coupled Burger equations is given by
(2)
(2)
(3)
(3)
with the boundary conditions:
(4)
(4)
and initial conditions:
(5)
(5)
To apply the proposed method, the time derivative was discretized by forward finite difference approximation and using Crank-Nicolson approach to Equationequations (2)(2)
(2) and Equation(3)
(3)
(3) , which obtained:
(6)
(6)
(7)
(7)
where
is the time step. The nonlinear terms in Equationequations (6)
(6)
(6) and Equation(7)
(7)
(7) are linearized using the form given by Rubin and Graves ((Rubin and Graves, Citation1975). Then the nonlinear terms are approximated as the below:
(8)
(8)
by approximating
and
by using septic B-spline functions
and the time dependent parameters
and
for
and
respectively, so the approximate solution written as:
(9)
(9)
using approximate function (9) and septic B-spline functions (1), the approximate values at the knots of
and their derivatives up to second order are determined in terms of the time parameters
and
respectively, as:
(10)
(10)
by substituting the approximate solution for
and its derivatives from Equationequations (10)
(10)
(10) , Equationequations (6)
(6)
(6) and Equation(7)
(7)
(7) yields the following difference equations with the unknowns
and
(11)
(11)
(12)
(12)
where
The systems in the Equationequations (11)(11)
(11) and Equation(12)
(12)
(12) consists of
equation in
unknowns. To get a unique solution to the systems, 12 additional constraints are required. These are obtained from the boundary conditions (4). Application the boundary conditions enables us to eliminate the parameters
from the system. Thus, we have a system of dimension (2 N + 2) × (2 N + 2), which is the septa-diagonal system that can be solved by any algorithm.
4. Initial values
To solve the system, we apply the initial conditions to determine: and
When t = 0, Equationequation (9)(9)
(9) becomes:
The approximate solution must satisfy the following:
(i) It must agree with the initial conditions at the knots
(ii) The derivatives of the approximate initial condition agree with the exact initialconditions at both ends of the range.
The initial conditions and the derivatives at the boundaries are used as below:
which is a septa-diagonal system for unknown initial values
and
of order
after eliminating the values of
and
This system can be solved by any algorithm. Once the initial vectors of parameters have been calculated, the numerical solution of coupled Burger equations U and V can be determined from the time evaluation of the vectors
and
by using the recurrence relations:
5. Stability analysis of the method
The stability analysis based on the von Neumann concept in which the growth factor of a typical Fourier mode defined as:
(13)
(13)
where
are the harmonics amplitude,
is the imaginary unit.
k is the mode number, h is the element size, and g is the amplification factor of the schemes.
The non-linear terms in the scheme are linearized by assuming the nonlinear terms as a constants and
respectively. At
the Equationequations (11)
(11)
(11) and Equation(12)
(12)
(12) can be rewritten as:
(14)
(14)
where
(15)
(15)
where
Substituting (13) into the difference Equationequation (14)(14)
(14) , yields
(16)
(16)
where
and
Similarly, substituting (13) into the difference Equationequation (15)(15)
(15) , results:
(17)
(17)
where
and
From Equationequations (16)(16)
(16) and Equation(17)
(17)
(17) ,
hence the scheme is unconditionally stable.
6. Numerical tests and results of coupled burgers' equations
The performance of the proposed method was tested by using two numerical examples, in this section and
error norms obtained by the following formulas:
Test problem (1):
Numerical solution of coupled Burgers Equationequations (2)(2)
(2) and Equation(3)
(3)
(3) is calculated for
which leads (2) and (3) as:
with the following initial and boundary conditions:
and
The exact solution is
In the first computation, and
error norms at
was computed with various values of
The corresponding results are presented in . Second computation,
and
error norms at time level
with decreasing values of
was calculated, the results are showed in . The results of both computations are the same for
and
because of the symmetric initial and boundary conditions. Furthermore, comparison of the numerical results of the problem (1) with the results obtained from Raslan et al. (Citation2016) for
with different time
has been studied. The results are presented in .
Table 1. -norm and
-norm for
at deferent
Table 2. -norm and
-norm for
when
Table 3. Comparison between numerical results of problem (1) and results obtained from (Raslan et al., Citation2016) for the variable and
with,
The graphical illustrations are presented in for computed solutions of and
at
represented solutions of
and
for
and
at
illustrated solutions (exact and approximation) of
and
for
and
at
The profiles of
and
at
and various values of
and
are plotted at different time steps and are showed in and .
Figure 1. Approximate solutions of in (A) and
in (B) for
and
at
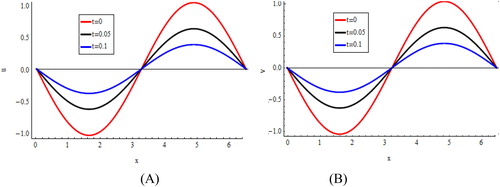
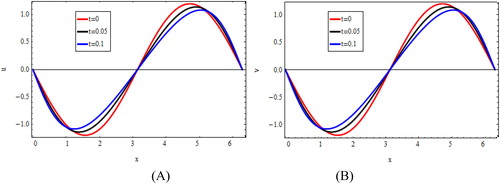
Figure 2. Approximate solutions of in (A) and
in (B) for
and
at
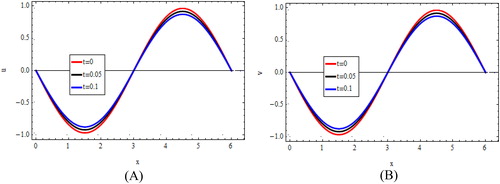
Figure 3. Exact and approximate solutions of in (A) and
in (B) for
and
at
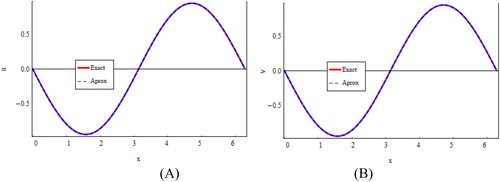
Figure 4. Approximate solutions of in (A) and
in (B) for
and
at
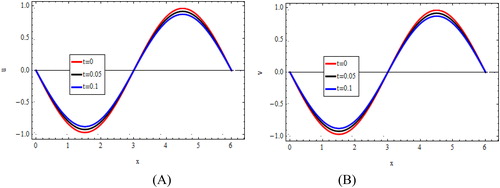
Figure 5. Approximate solutions of in (A) and
in (B) for
and
at
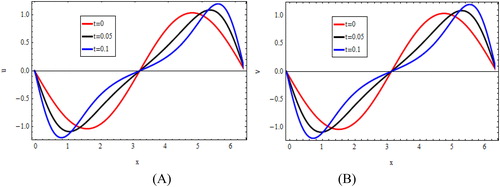
Figure 6. Approximate solutions of in (A) and
in (B) for
and
at
Test problem (2)
Numerical solutions of considered coupled Burgers' equations have been obtained for with different values of
and
at different time levels. In this situation the exact solution is
The initial and boundary conditions are taken from the exact solution given below:
where
and
The numerical solutions for
and
have been computed for the domain
and number of partitions
and
and
norms have been presented in for
and
and include comparison of our numerical results of problem (2) with results obtained from (Raslan et al., Citation2016) for the variables
and
with
at different time
and different values of
and , contain comparison of our numerical results of problem (2) with results obtained from (Raslan et al., Citation2016) for the variables
and
with
at different values of
and
Table 4. -norm and
-norm for
at deferent values of
and
Table 5. Comparison between numerical results of problem (2) and results obtained from (Raslan et al., Citation2016) for the variable with
Table 6. Comparison between numerical results of problem (2) and results obtained from (Raslan et al., Citation2016) for the variable with
Table 7. Comparison between numerical results of problem (2) and results obtained from (Raslan et al., Citation2016) for the variable with
Table 8. Comparison between numerical results of problem (2) and results obtained from (Raslan et al., Citation2016) for the variable with
Table 9. - norm and
-norm for
at deferent values of
and
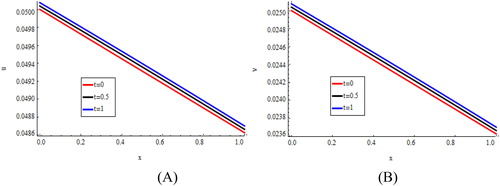
The corresponding graphical illustrations are presented in (), computed approximation solutions of and
for
and
at
Figure 7. Approximate solutions of in (A) and
in (B) for
and
at
7. Conclusions
In this paper, a numerical scheme for the nonlinear coupled Burger's equations has been proposed using a collocation method based on septic B-spline functions. The proposed method is unconditionally stable. The method has been evaluated by two test problems. The accuracy of the method has been measured by computing and
error norms. The obtained numerical results are quite satisfactory and comparable with the analytic solution and better than the obtained numerical results in (Raslan et al., Citation2016). Based on the stability and accuracy of the proposed method, the method can be extended to solve various linear and nonlinear partial differential equations.
Disclosure statement
No potential conflict of interest was reported by the authors.
Related Research Data
References
- Abdou, M. A., & Soliman, A. A. (2005). Variational iteration method for solving Burgers and coupled Burger equations. The Journal of Computational and Applied Mathematics, 181(2), 245–251.
- Ali, K. K., Raslan, K. R., & El-Danaf, T. S. (2015). Non-polynomial spline method for solving coupled Burgers’ equations. Computational Methods for Differential Equations, 3(3), 218–230.
- Bashan, A., Karakoc, S. B. G., & Geyikli, T. (2015). B-spline differential quadrature method for the modified Burgers' equation. Cankaya University Journal of Science and Engineering, 12(1), 1–13.
- Bonkile, M. P., Awasthi, A., Lakshmi, C., Mukundan, V., & Aswin, V. S. (2018). A systematic literature review of Burgers’ equation with recent advances. Pramana: Journal of Physics, 90, 69.
- Bryan, R., Todd, O., Lee, M. K., & Robert, M. (2017). A mass-conserving mixed Fourier-Galerkin B-spline-collocation method for direct numerical simulation of the variable- density Navier-Stokes equations. APS Division of Fluid Dynamics, 2017, A32.006R.
- Burger, J. M. (1948). A mathematical model illustrating the theory of turbulence. Advances in Applied Mechanics, 1, 171–199.
- Cole, J. D. (1951). On a quasi linear parabolic equations occurring in aerodynamics. Quarterly of Applied Mathematics, 9(3), 225–236.
- Deghan, M., Asgar, H., & Mohammad, S. (2007). The solution of coupled Burgers equations using Adomian-Pade technique. Appl. Math. Comput, 189(2), 1034–1047.
- El-Danaf, T. S. (2008). Septic B-spline method of the Korteweg-de Vries-Burger’s equation. Communications in Nonlinear Science and Numerical Simulation, 13, 554–566.
- Ersoy, O., & Dag, I. (2015, March 2). An exponential cubic B-spline finite element method for solving the nonlinear coupled Burger equation. arXiv:1503.00456 [Math NA].
- Esipov, S. E. (1995). Coupled Burger's equations-a model of polydispersive sedimentation. Physical Review. E, Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 52(4), 3711–3718.
- Geyikli, T., & Karakoc, S. B. G. (2011). Septic B-spline collocation method for the numerical solution of the modified equal width wave equation. Applied Mathematics, 2(6), 739–749.
- Islam, S., Sarler, B., Vertnik, R., & Kosec, G. (2012). Radial basis function collocation method for the numerical solution of the two-dimensional transient nonlinear couple Burgers equations. Appl. Math. Model, 36(3), 1148–1160.
- Karakoc, S. B. G., Bashan, A., & Geyikli, T. (2014). Two different methods for numerical solution of the Modified Burgers' equation. The Scientific World Journal, 2014, 780269.
- Karakoc, S. B. G., & Zeybek, H. (2016). Solitary-wave solutions of the GRLW equation using septic B-spline collocation method. Journal of Applied Mathematics and Computing, 289, 159–1571. doi:10.1016/j.amc.2016.05.021
- Kaya, D. (2001). An explicit solution of coupled viscous Burgers equations by the Decomposition method. Int. J. Math. Math. Sci, 27(11), 675–680. doi:10.1155/S0161171201010249
- Khater, A. H., Temsah, R. S., & Hassan, M. M. (2008). A Chebyshev spectral collocation method for solving Burgers-type equations. The Journal of Computational and Applied Mathematics, 222(2), 333–350.
- Korkmaz, A., & Akmaz, H. K. (2015). Numerical simulations for transport of conservative pollutants. Selcuk Journal of Applied Mathematics, 16(1), 1–11.
- Korkmaz, A., & Akmaz, H. K. (2018). Numerical solution of non-conservative linear transport problem. TWMS Journal of Applied and Engineering Mathematics, 8(1a), 167–177.
- Kutluay, S., & Ucar, Y. (2013). Numerical solutions of the coupled Burgers’ equation by the Galerkin quadratic B‐spline finite element method. Mathematical Methods in the Applied Sciences, 36(17), 2403–2415. doi:10.1002/mma.2767
- Lashkarian, E., Hejazi, S. R., Habibi, N., & Motamednezhad, A. (2019). Symmetry properties, conservation laws, reduction and numerical approximations of time fractional cylindrical- Burger equation. Communications in Nonlinear Science and Numerical Simulation, 67, 176–191.
- Luo, X. Q., Liu, L. B., Ouyang, A., & Long, G. (2018). B-spline collocation and self-adapting differential evolution (jDE) algorithm for a singularly perturbed convection–diffusion problem. Soft Computing, 22(8), 2683–2693.
- Mittal, R. C., & Arora, G. (2011). Numerical solution of the coupled viscous Burgers’ equation. Communications in Nonlinear Science and Numerical Simulation, 16(3), 1304–1313.
- Mokhtari, R., Toodar, A. S., & Chegini, N. G. (2011). Application of the generalized differential quadrature method in solving Burgers’ equations. Communications in Theoretical Physics, 56(6), 1009–1015.
- Nee, J., & Duan, J. (1998). Limit set of trajectories of the coupled viscous Burgers’ equations. Applied Mathematics Letters, 11(1), 57–61.
- Pana, K., Wu, X., Yue, X., & Ni, R. (2018). A spatial sixth-order CCD-TVD method for solving multidimensional coupled Burgers’ equation. arXiv:1805.08407v1 [Math NA].
- Prakasha, A., Kumar, M., & Sharma, K. K. (2015). Numerical method for solving fractional coupled Burgers equations. Journal of Applied Mathematics and Computing., 260, 314–320.
- Quarteroni, A., Sacco, R., & Saleri, F. (2007). Numerical mathematics. Berlin: Springer-Verlag.
- Ramadan, M. A., El- Danaf, T. S., & Abd Alaal, F. E. (2005). A numerical solution of the Burgers' equation using septic B-splines. Chaos Solitons & Fractals, 26, 795–804.
- Rashid, A., & Ismail, A. I. (2009). A Fourier pseudo spectral method for solving coupled Viscous Burgers equations. Computational Methods in Applied Mathematics, 9(4), 412–420.
- Raslan, K. R., El-Danaf, T. S., & Ali, K. K. (2016). Collocation method with cubic trigonometric B-spline algorithm for solving coupled Burges' equations. Far East Journal of Applied Mathematics, 95(2), 109–123.
- Raslan, K. R., El-Danaf, T. S., & Ali, K. K. (2017). Collocation method with quintic B- spline method for solving coupled Burges' equations. Far East Journal of Applied Mathematics, 96(1), 55–75.
- Rubin, S. G., & Graves, R. A. (1975). Cubic spline approximation for problems in fluid mechanics. NASA TRR-436. Washington, DC: NASA.
- Rohila, R., & Mittal, R. C. (2018). Numerical study of reaction diffusion Fisher’s equation by fourth order cubic B-spline collocation method. Mathematical Sciences, 12(2), 79–89.
- Sharifi, S., & Rashidinia, J. (2016). Numerical solution of hyperbolic telegraph equation by cubic B-spline collocation method. Journal of Applied Mathematics and Computing, 281, 28–38.
- Shi, F., Zheng, H., Cao, Y., Li, J., & Zhao, R. (2017). A fast numerical method for solving coupled Burgers’ equations. Numerical Methods for Partial Differential Equations, 33(6), 1823–1838.
- Soliman, A. A. (2006). The modified extended tanh-function method for solving Burgers type equations. Journal of Physics A: Mathematical and Theoretical, 361(2), 394–404.
- Soliman, A. A., & Hussien, M. H. (2005). Collocation solution for RLW equation with septic spline. Journal of Applied Mathematics and Computing, 161, 623–636.
- Srivastava, V. K., Awasthi, M. K., Tamsir, M., & Singh, S. (2013). An implicit finite-difference solution to one dimensional coupled Burgers' equation. Asian-European Journal of Mathematics, 6(4), 1350058.
- Srivastava, V. K., Awasthi, M. K., & Tamsir, M. (2013). A fully implicit finite-difference solution to one dimensional coupled nonlinear Burgers equation. International Journal of Computing Science and Mathematics, 7(4), 283–288.
- Srivastava, V. K., Tamsir, M., Awasthi, M. K., & Singh, S. (2014). One-dimensional coupled Burgers' equation and its numerical solution by an implicit logarithmic finite-difference method. AIP Advances, 4(3), 037119.
- Wang, G. W., & Kara, A. H. (2018). Group analysis, fractional explicit solutions and conservation laws of time fractional generalized Burgers’ equation. Communications in Theoretical Physics, 69(1), 5–8.
- Wei, G. W., & Gu, Y. (2002). Conjugate filter approach for solving Burgers’ equation. The Journal of Computational and Applied Mathematics, 149(2), 439–456.