
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The aim of this work is to discuss the solvability of a boundary value problem for a nonlinear integro-differential equation. First, we derive an equivalent nonlinear Fredholm integral equation (NFIE) to this problem. Second, we prove the existence of a solution to the NFIE using the Krasnosel’skii fixed point theorem under verifying some sufficient conditions. Third, we solve the NFIE numerically and study the convergence rate via methods based upon applying the modified Adomian decomposition method and Liao’s homotopy analysis method. As applications, some examples are illustrated to support our work. The results in this work refer to both methods are efficient and converge rapidly, but the homotopy analysis method may converge faster when we succeed in choosing the optimal homotopy control parameter.
1. Introduction
Many problems arising in applied physics, biology, chemistry and engineering can be described using mathematical models that depend on utilizing integral and differential operators with imposed conditions. For example, the so-called Chandrasekhar H-function that appears in the radiative transfer processes, is defined in terms of integral equation. The evolution of biological populations is characterized by employing delayed integro-differential equations of the Volterra type. Continuous medium-nuclear reactors are analysed using models that employ systems of integro-differential equations. Also, there are the singular integral equations that occur during the process of formulating mixed boundary value problems in mathematical physics, especially in solid mechanics and elasticity. Using the Green function approach, we can transform many partial differential equations to equivalent integral equations. So, trying to find solutions for these equations attracts many researchers. Because we cannot determine the exact solutions for most of these equations, “many numerical” or “semi-analytic” techniques are developed to overcome this gap. From these methods, there are the Adomian decomposition method (ADM), homotopy perturbation method (HPM), variational iteration method (VIM), homotopy analysis method (HAM) and many other methods, see Abdou, Soliman, and Abdel-Aty (Citation2020), Hamoud and Ghadle (Citation2018), He (2020a, 2020b), Mirzaee and Alipour (Citation2019), Rezabeyk, Abbasbandy, and Shivanian (Citation2020), Saeedi, Tari, and Babolian (Citation2020) among others. These techniques can be applied to find approximate solutions for a large class of linear and nonlinear integral equations and many functional equations as well. Also, in some special cases, when the series solution converges to a known function we can get a closed form-solution using these methods. For example, Wazwaz (Citation2010) confirmed that the VIM is very reliable in solving first- and second-kind integral equations of the Volterra type and most calculations can be significantly reduced. Alhendi, Shammakh, and Al-Badrani (Citation2017) found that the VIM and HPM are very effective when applying them to solve quadratic fractional integro-differential equations. Elborai, Abdou, and Youssef (Citation2013) studied the mean square convergence of the series solution for a stochastic integro-differential equation and estimated the truncation error by the ADM. Kurt and Tasbozan (Citation2019) utilized the HAM to solve the modified Burgers equation. Singh, Kumar, Baleanu, and Rathore (Citation2018) used the Sumudu transform along with the HAM to find approximate solutions to some fractional equations of the Drinfeld–Sokolov–Wilson type. Hetmaniok, Słota, Trawiński, and Wituła (Citation2014) explained the applicability of the HAM in solving nonlinear integral equations of second kind. Hamoud, Ghadle, and Atshan (Citation2019) applied the MADM (modified Adomian’s decomposition method) to find an approximate solution for a class of fractional nonlinear integro-differential equation of the Caputo-Volterra–Fredholm type. Issa, Hamoud, and Ghadle (Citation2021) used the MADM, VIM and HPM to solve a fuzzy integro-differential equation of the Volterra type numerically and compared the results, see Adomian (Citation1994), Alidema and Georgieva (Citation2018), Bakodah, Al-Mazmumy, and Almuhalbedi (Citation2019), Liao (Citation2012), Maitama and Zhao (Citation2019) and Singh, Nelakanti, and Kumar (Citation2014) for more applications regarding these elegant methods and the references therein.
The current article discusses the solvability of a two-point boundary value problem for a nonlinear integro-differential equation in the form
(1.1)
(1.1)
subject to the boundary conditions
(1.2)
(1.2)
where
is a finite non-negative integer. The parameters
are two non zero real parameters. The functions
and the kernel K are known functions satisfying certain conditions to be assigned in the next section while
is the sought function to be determined in the space
(see Def. (2.1)). The present form of EquationEq. (1.1)
(1.1)
(1.1) is not discussed before to the best of our knowledge. This work is organized as follows. In the section “Outcomes for existence and uniqueness”, we derive a corresponding nonlinear Fredholm integral equation (NFIE) for EquationEquation (1.1)
(1.1)
(1.1) under verifying condition (1.2). Then, we apply the Krasnosel’skii fixed point theorem to prove the existence of solutions for this NFIE under satisfying some sufficient conditions. The uniqueness of this solution is investigated as well. The convergence of solution and truncation error is studied in the “Analysis of MADM” section. The homotopy analysis technique is applied to problem (1.1) under verifying condition (1.2) in the “Analysis of HAM” section. Next, we present some applications in the section “Numerical and analytical outcomes”. The section “Conclusion” is devoted to the discussion of results.
2. Outcomes for existence and uniqueness
In order to prove Thm. (2.1) we suppose the following postulates.
the functions A1 and A2 are elements in the space
the known free function f belongs to the space
the known kernel
is continuous in
Theorem 2.1.
Let conditions are satisfied. Then the boundary value problem (1.1)-(1.2) is equivalent to the following NFIE.
(2.1)
(2.1)
where:
(2.2)
(2.2)
(2.3)
(2.3)
(2.4)
(2.4)
(2.5)
(2.5)
(2.6)
(2.6)
(2.7)
(2.7)
Proof.
Let where the function
is an element in the space
So, we have
(2.8)
(2.8)
and
(2.9)
(2.9)
Putting x = b in EquationEquation (2.9)(2.9)
(2.9) , then using the result in EquationEquations (2.8)
(2.8)
(2.8) and Equation(2.9)
(2.9)
(2.9) gives
(2.10)
(2.10)
(2.11)
(2.11)
where:
It is easy to see that
(2.12)
(2.12)
Substituting EquationEquations (2.10) (2.11)(2.11)
(2.11) and Equation(2.12)
(2.12)
(2.12) in EquationEquation (1.1)
(1.1)
(1.1) gives
(2.13)
(2.13)
It is easy to figure out Set
Therefore, we have
Using EquationEquation (2.7)
(2.7)
(2.7) yields
The converse can be done easily and thereby it is omitted. The proof is completed. □
Remark 2.1.
It is worth mentioning that Thm. (2.1) is valid whether the kernel is continuous or has a singularity of the weak type at the straight line y = x.
Definition 2.1.
By a solution for the boundary value problem EquationEquation (1.1)(1.1)
(1.1) , we mean proving the existence of a function
satisfying EquationEquation (1.1)
(1.1)
(1.1) , and the boundary conditions (1.2).
Let the constant We define the following positive real constants.
We consider the following assumption.
(iv)
Theorem 2.2.
Let conditions are verified. Then the NFIE (2.1) possesses continuous solutions.
Proof.
Let The radius r is a finite positive solution for the equation
Let u1, u2 be any two functions in the set Ωr. Define the following two operators.
(2.14)
(2.14)
Applying the Cauchy inequality and then, simplifying the right-hand side yield
Using condition (iii), passing the supremum over and then, utilizing the value of
give
(2.15)
(2.15)
Using similar arguments as we used above implies
(2.16)
(2.16)
Using EquationEquations (2.15)(2.15)
(2.15) and Equation(2.16)
(2.16)
(2.16) give
(2.17)
(2.17)
Therefore, Now, suppose
be two elements in
The functions F, H1 and H2 are continuous in x from applying conditions
and therefore, we have
(2.18)
(2.18)
Also, we have
(2.19)
(2.19)
So, Tu1 and Wu2 are elements in the space Consequently, the operator T + W is a self-operator on Ωr. Let
be any two functions in the set Ωr. So,
(2.20)
(2.20)
Therefore, the operator T is a contraction operator on Ωr from applying condition (iv). Consider the sequence with
such that
when
It is clear that
and
Applying the Arzela convergence theorem implies
where e(l) is a finite positive constant depends on l. Therefore, the operator W is a sequentially continuous operator on Ωr and hence it is continuous on Ωr. It is clear from EquationEquation (2.16)
(2.16)
(2.16) that
and hence the set
is uniformly bounded. Consider the sequence
with
Using similar steps as we followed in EquationEquation (2.19)
(2.19)
(2.19) implies
when
Therefore, there exists a sub-sequence
which converges uniformly in
from applying the Arzela-Ascoli theorem and consequently the set
is compact. As a result, the operator W is completely continuous. Now all conditions of the Krasnosel’skii theorem are satisfied and therefore, the operator T + W has at least one fixed point in the set Ωr which is a solution for the NFIE (2.1). The proof is completed.□
In what follows we suppose that:
(v)
Theorem 2.3.
Let the conditions and (v) are verified. Then the NFIE (2.1) has a unique continuous solution.
Proof.
It is clear that the operator T + W is a self-operator on Ωr. Using similar steps as we have done in EquationEquation (2.20)(2.20)
(2.20) leads to
(2.21)
(2.21)
Using EquationEquations (2.20)(2.20)
(2.20) and Equation(2.21)
(2.21)
(2.21) lead to
(2.22)
(2.22)
So, the operator T + W is contraction on Ωr from utilizing condition (v) and consequently, the NFIE (2.1) posses a unique continuous solution in Ωr from applying the Banach fixed point theorem. The proof is completed. □
For the next theorem, let Also, let
where
and
Theorem 2.4.
Let the conditions are verified. Then the following linear Fredholm integral equation (LFIE)
(2.23)
(2.23)
possesses a unique continuous solution in
Proof.
The proof is similar to the arguments that we have used above. So, it is omitted.
3. The MADM for the NFIE
This section is devoted to using the MADM (Wazwaz, Citation1999) to find an approximate solution to the NFIE (2.1) subject to satisfying conditions of Thm. (2.3). Assume the sought function u(x) of EquationEquation (2.1)(2.1)
(2.1) can be approximated using the formula
(3.1)
(3.1)
Substituting EquationEquation (3.1)
(3.1)
(3.1) in EquationEquation (2.1)
(2.1)
(2.1) gives
(3.2)
(3.2)
where Adomain’s polynomial,
is evaluated using the equation below.
(3.3)
(3.3)
Let and define
to get the recursive equations defined below.
(3.4)
(3.4)
Theorem 3.1.
The approximate solution determined by EquationEquation (3.1)(3.1)
(3.1) for the NFIE (2.1) converges to the exact solution u(x) under satisfying conditions of Thm. (2.3).
Proof.
Let be the sequence of partial sums where
Let m and n be two distinct positive integers with
Then
(3.5)
(3.5)
Substitute in EquationEquation (3.5)
(3.5)
(3.5) yields
(3.6)
(3.6)
Applying the triangle inequality and setting m, and n to be big enough give
Therefore, we have
(3.7)
(3.7)
Using condition (v), the sequence
with
is a Cauchy sequence in
Consequently
converges and
from Thm. (2.3). The proof is completed.□
4. The HAM for the NFIE
This section is devoted to applying the HAM (Liao, Citation2012) to the NFIE (2.1) under satisfying conditions of Thm. (2.3). From EquationEquation (2.1)(2.1)
(2.1) , we define the nonlinear operator
by
(4.1)
(4.1)
From EquationEquations (2.1)(2.1)
(2.1) and Equation(4.1)
(4.1)
(4.1) , we have
(4.2)
(4.2)
Define the homotopy of the sought function u(x) as below.
(4.3)
(4.3)
the convergence of the method is controlled using the parameter
the homotopy parameter is denoted by
the linear operator
the nonlinear operator N is defined using EquationEquation (4.1)
In this work, we define by
Setting
(4.5)
(4.5)
and then solving EquationEquation (4.5)
(4.5)
(4.5) gives the zero-order deformation as below.
(4.6)
(4.6)
Remark 4.1.
The zero-order deformation implies the following important notes.
Putting q = 0 in EquationEquation (4.6)
Putting q = 1 in EquationEquation (4.6)
During the increasing of the parameter q from 0 to 1, the function
Assuming the parameter is chosen such that
EquationEquation (4.6)
(4.6)
(4.6) possesses a solution and this solution is analytic at q = 0 (Liao, Citation2003). So, we can assume the solution of the NFIE (2.1) on the form
(4.7)
(4.7)
where
(4.8)
(4.8)
and the difference EquationEquation (4.9)
(4.9)
(4.9) is used to generate the terms
as we will see in the next section.
(4.9)
(4.9)
5. Numerical and analytical outcomes
Example 5.1.
Consider the following boundary value problem
(5.1)
(5.1)
Applying EquationEquation (2.11)(2.11)
(2.11) yields
(5.2)
(5.2)
where
(5.3)
(5.3)
(5.4)
(5.4)
(5.5)
(5.5)
The exact (closed form) solution of EquationEquation (5.3)(5.3)
(5.3) is
with
and hence
with
from using EquationEquations (5.2)
(5.2)
(5.2) and Equation(2.7)
(2.7)
(2.7) . The kernel
is a real-valued continuous function in
and
Actually, it is obvious that
So, EquationEquation (5.3)
(5.3)
(5.3) has a unique solution in
with
(1.) Approximate solution using the MADM
(5.6)
(5.6)
Using the recursive EquationEquation (5.6)
(5.6)
(5.6) implies
(5.7)
(5.7)
where presents the absolute errors between the exact solution and the first four approximate solutions using the MADM. We observe that the approximate solutions, that are obtained using the MADM, converge very fast to the exact solution, see .
Figure 1. The exact (closed form) solution and approximate solutions
and
for Ex. (5.1) using the MADM.
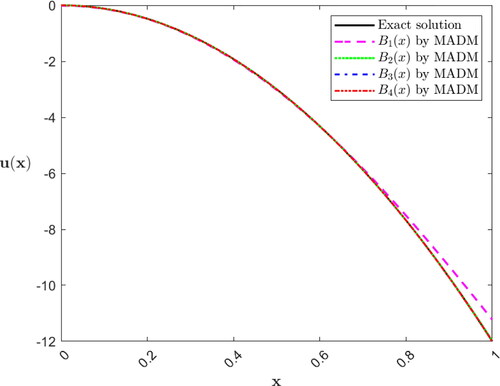
Table 1. The exact solution of Ex. (5.1) along with the approximate solutions
and
using the MADM and the corresponding infinite norm of absolute errors in bold.
(2.) Approximate solution using the HAM
The zero-order deformation is defined, from using EquationEquation (4.6)(4.6)
(4.6) , as below.
(5.8)
(5.8)
where
and the operator N is defined as follows.
(5.9)
(5.9)
where the functions H(x, t), and
are defined by EquationEquations (5.4)
(5.4)
(5.4) and Equation(5.5)
(5.5)
(5.5) respectively. It is obvious that setting p = 0, and p = 1 in EquationEquation (5.8)
(5.8)
(5.8) yields
and
Applying the recursive EquationEquations (4.9)
(4.9)
(4.9) gives
(5.10)
(5.10)
The values of
that ensure the convergence of the approximate solution to the exact (closed form) solution are evaluated from the line segments that are nearly parallel to the
axis in the
curves in . Minimizing the squared of residual yields the optimal value of
see . For example, minimizing the squared residual that is based on utilizing
where
gives
see . Using
gives the same results that we obtained when we utilized the MADM in . So, from the results that are obtained in and , we can notice that the two methods are very efficient in solving Ex. (5.1) and converge very fast to the exact solution under satisfying conditions of Thm. (2.3). But the HAM may converge slightly faster than the MADM when we use the optimal value of
corresponding to each
Figure 2. The curves of
in Ex. (5.1) based on using
and
approximations in the HAM.
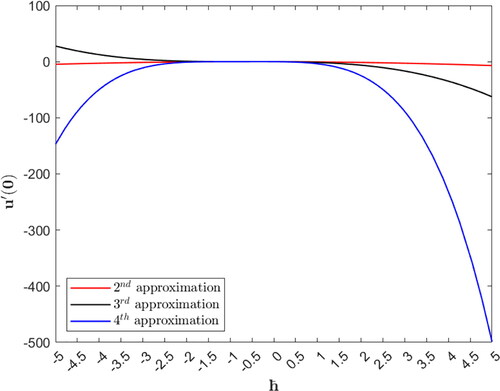
Figure 3. Depiction of the optimal value of the control parameter corresponding to each
using the HAM in Ex. (5.1).
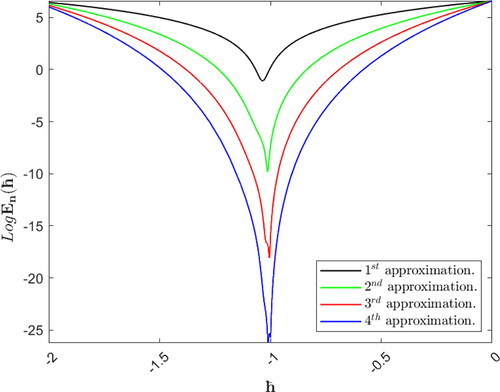
Table 2. The exact solution of Ex. (5.1) along with the approximate solutions
and
utilizing the HAM and the corresponding infinite norm of absolute errors in bold.
Example 5.2.
Consider the following boundary value problem
(5.11)
(5.11)
Applying EquationEquation (2.11)(2.11)
(2.11) yields
(5.12)
(5.12)
where
and
(5.13)
(5.13)
(5.14)
(5.14)
(5.15)
(5.15)
The exact (closed form) solution of EquationEquation (5.13)(5.13)
(5.13) is
with
where
Applying EquationEquation (5.12)
(5.12)
(5.12) yields
with
The kernel
is a real-valued continuous function in
and
Indeed, it is easy to see that
Therefore, EquationEquation (5.13)
(5.13)
(5.13) has a unique solution in Ωr with
(1.) Approximate solution using the MADM
(5.16)
(5.16)
Using the recursive EquationEquation (5.16)
(5.16)
(5.16) implies
(5.17)
(5.17)
where shows the absolute errors between the exact solution and the first four approximate solutions using the MADM. We can observe that the approximate solutions, that are obtained using the MADM, converge very fast to the exact solution, see .
Figure 4. The exact (closed form) solution and approximate solutions
and
for Ex. (5.2) using the MADM.
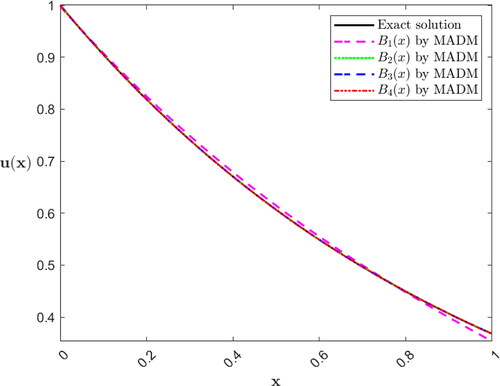
Table 3. The exact solution of Ex. (5.2) along with the approximate solutions
and
using the MADM and the corresponding infinite norm of absolute errors in bold.
(2.) Approximate solution using the HAM
The zero-order deformation is defined, from using EquationEquation (4.6)(4.6)
(4.6) , as below.
(5.18)
(5.18)
where
and the operator N is defined as follows.
(5.19)
(5.19)
where the functions H(x, t), and
are defined by EquationEquations (5.14)
(5.14)
(5.14) and Equation(5.15)
(5.15)
(5.15) respectively. It is obvious that setting p = 0, and p = 1 in EquationEquation (5.18)
(5.18)
(5.18) yields
and
Applying the recursive EquationEquations (4.9)
(4.9)
(4.9) gives
(5.20)
(5.20)
The values of that ensure the convergence of the approximate solution to the exact (closed form) solution are evaluated from the line segments that are nearly parallel to the
axis in the
curves in . Minimizing the squared of residual yields the optimal value of
see . For example, minimizing the squared residual that is based on utilizing
where
gives
see . Using
gives the same results that we obtained when we utilized the MADM in . So, from the results that are obtained in and , we can notice that the two methods are very efficient in solving Ex. (5.2) and converge very fast to the exact solution under satisfying conditions of Thm. (2.3). But the HAM may converge slightly faster than the MADM when we use the optimal value of
corresponding to each
Figure 5. The curves of
in Ex. (5.2) based on using
and
approximations in the HAM.
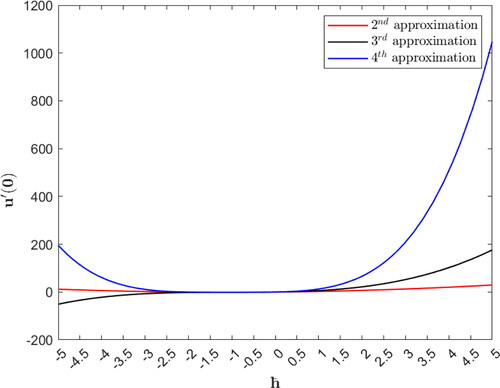
Figure 6. Depiction of the optimal value of the control parameter corresponding to each
using the HAM in Ex. (5.2).
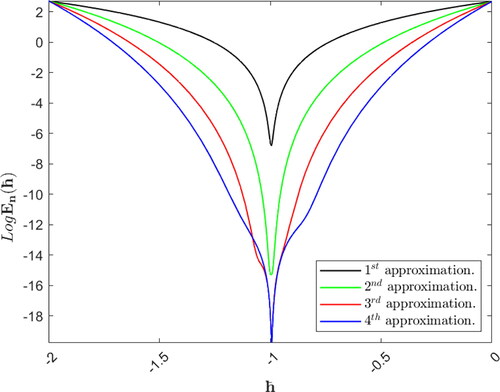
Table 4. The exact solution of Ex. (5.2) along with the approximate solutions
and
utilizing the HAM and the corresponding infinite norm of absolute errors in bold.
6. Conclusion
In this work, we have studied a boundary value problem for a nonlinear integro-differential equation. An equivalent NFIE has been derived for the proposed problem, then the Krasnosel’skii fixed point has been applied to investigate the existence of continuous solutions. Moreover, the sufficient conditions which guarantee the uniqueness of the solution are proved. We have determined an approximate solution to the NFIE using the MADM. The convergence and error estimates of this approximate solution are studied as well. After that, the homotopy analysis technique is applied to get another approximate solution for the NFIE. We compared the accuracy and convergence rate of the approximate solution using the two techniques. It turns out for us that both methods are efficient and converge very rapidly, but the HAM may converge slightly faster when we succeed in choosing the optimal homotopy control parameter. We may study the fractal version that is corresponding to EquationEquation (1.1)(1.1)
(1.1) for future suggested work (He, 2020a, 2020b).
Authors’ contributions
The authors conducted the current research article equally and approved the submitted manuscript.
Availability of data and materials
All the needed data are enclosed in the current article.
Geolocation information
Latitude: 21.5908352
Longitude: 39.159398399999986
Acknowledgments
The authors thank the anonymous referees for their valuable comments.
Disclosure statement
The authors affirm that there are no competing interests.
Funding
Not applicable.
References
- Abdou, M. A., Soliman, A. A., & Abdel-Aty, M. A. (2020). On a discussion of Volterra–Fredholm integral equation with discontinuous kernel. Journal of the Egyptian Mathematical Society, 28(1), 11. doi:https://doi.org/10.1186/s42787-020-00074-8
- Adomian, G. (1994). Solving frontier problems of physics: The decomposition method. Kluwer Academic Publishers, Boston.
- Alhendi, F., Shammakh, W., & Al-Badrani, H. (2017). Numerical solutions for quadratic integro-differential equations of fractional orders. Open Journal of Applied Sciences, 7(4), 157–170. doi:https://doi.org/10.4236/ojapps.2017.74014
- Alidema, A., & Georgieva, A. (2018). Adomian decomposition method for solving two-dimensional nonlinear Volterra fuzzy integral equations. AIP Conference Proceedings, 2048:050009.
- Bakodah, H. O., Al-Mazmumy, M., & Almuhalbedi, S. O. (2019). Solving system of integro differential equations using discrete Adomian decomposition method. Journal of Taibah University for Science, 13(1), 805–812. doi:https://doi.org/10.1080/16583655.2019.1625189
- Elborai, M. M., Abdou, M. A., & Youssef, M. I. (2013). On Adomian’s decomposition method for solving nonlocal perturbed stochastic fractional integrodifferential equations. Life Science Journal, 10(4), 550–555.
- Hamoud, A. A., & Ghadle, K. P. (2018). The approximate solutions of fractional Volterra-Fredholm integro-differential equations by using analytical techniques. Issues of Analysis, 25(1), 41–58. doi:https://doi.org/10.15393/j3.art.2018.4350
- Hamoud, A., Ghadle, K., & Atshan, S. (2019). The approximate solutions of fractional integro-differential equations by using modified Adomian decomposition method. Khayyam Journal of Mathematics, 5(1), 21–39.
- He, J. H. (2020a). A simple approach to Volterra-Fredholm integral equations. Journal of Applied and Computational Mechanics, 6(Special Issue), 1184–1186.
- He, J. H. (2020b). A short review on analytical methods for to a fully fourth-order nonlinear integral boundary value problem with fractal derivatives. International Journal of Numerical Methods for Heat & Fluid Flow, 30(11), 4933–4943. doi:https://doi.org/10.1108/HFF-01-2020-0060
- Hetmaniok, E., Słota, D., Trawiński, T., & Wituła, R. (2014). Usage of the homotopy analysis method for solving the nonlinear and linear integral equations of the second kind. Numerical Algorithms, 67(1), 163–185. doi:https://doi.org/10.1007/s11075-013-9781-0
- Issa, M., Hamoud, A., & Ghadle, K. (2021). Numerical solutions of Fuzzy integro-differential equations of the second kind. Journal of Mathematics and Computer Science, 23, 67–74.
- Kurt, A., & Tasbozan, O. (2019). Approximate analytical solutions to conformable modified Burgers equation using homotopy analysis method. Annales Mathematicae Silesianae, 33(1), 159–167. doi:https://doi.org/10.2478/amsil-2018-0011
- Liao, S. J. (2003). Beyond perturbation introduction to the homotopy analysis method. Chapman and Hall/CRC, Boca Raton.
- Liao, S. J. (2012). Homotopy analysis method in nonlinear differential equation. Beijing: Higher Education Press and Berlin/Heidelberg: Springer-Verlag.
- Maitama, S., & Zhao, W. (2019). Local fractional homotopy analysis method for solving non-differentiable problems on Cantor sets. Advances in Difference Equations, 2019(1), 22. doi:https://doi.org/10.1186/s13662-019-2068-6
- Mirzaee, F., & Alipour, S. (2019). Numerical solution of nonlinear partial quadratic integro-differential equations of fractional order via hybrid of block-pulse and parabolic functions. Numerical Methods for Partial Differential Equations, 35(3), 1134–1151. doi:https://doi.org/10.1002/num.22342
- Rezabeyk, S., Abbasbandy, S., & Shivanian, E. (2020). Solving fractional-order delay integro-differential equations using operational matrix based on fractional-order Euler polynomials. Mathematical Sciences, 14(2), 97–107. doi:https://doi.org/10.1007/s40096-020-00320-1
- Saeedi, L., Tari, A., & Babolian, E. (2020). A study on functional fractional integro-differential equations of Hammerstein type. Computational Methods for Differential Equations, 8(2020), 173–193.
- Singh, J., Kumar, D., Baleanu, D., & Rathore, S. (2018). An efficient numerical algorithm for the fractional Drinfeld–Sokolov–Wilson equation. Applied Mathematics and Computation, 335(C), 12–24. doi:https://doi.org/10.1016/j.amc.2018.04.025
- Singh, R. R., Nelakanti, G., & Kumar, J. (2014). Approximate solution of Urysohn integral equations using the Adomian decomposition method. TheScientificWorldJournal, 2014, 150483. doi:https://doi.org/10.1155/2014/150483
- Wazwaz, A. (2010). The variational iteration method for solving linear and nonlinear Volterra integral and integro-differential equations. International Journal of Computer Mathematics, 87(5), 1131–1141. doi:https://doi.org/10.1080/00207160903124967
- Wazwaz, A. M. (1999). A reliable modification of Adomian decomposition method. Applied Mathematics and Computation, 102(1), 77–86. doi:https://doi.org/10.1016/S0096-3003(98)10024-3