
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The primary objective of this research paper is to introduce a novel technique known as the double ARA transform (DARAT) for effectively solving a broad spectrum of problems, encompassing both linear and nonlinear scenarios. This study specifically explores the application of DARAT to address the regular and singular one-dimensional coupled Burgers’ equations. Significant enhancements have been made to the original ARA transform to improve its precision and accuracy in handling linear problems. Additionally, DARAT has been seamlessly integrated with the well-established Adomian decomposition technique, which is renowned for its efficacy in solving nonlinear issues. The effectiveness of our proposed method is demonstrated through its remarkable ability to solve partial differential equations (PDEs), with the results clearly illustrated through graphical representations and detailed tables. These outcomes affirm the method’s robustness in deriving accurate solutions for both regular and singular coupled Burgers’ equations.
1. Introduction
Integral transform methods are foundational and broadly employed in solving partial differential equations (PDEs). These equations are critical for modeling a vast array of phenomena across various disciplines related to mathematics, such as physics, engineering, and other scientific fields. These models are articulated through diverse PDEs as referenced in studies by (Alam & Tunc, Citation2016; Alam & Tunç, Citation2020; Eddine & Ragusa, Citation2022; Constanda, Citation2018; Evans, Citation2010; Islam, Alam, Fayz-Al-Asad, & Tunç, Citation2021; A. K. H. Sedeeg, Citation2023).
Integral transforms are similarly effective in resolving PDEs. This study primarily employs the double ARA transform to tackle these equations. This double integral transform offers a potent tool, transforming PDEs into algebraic equations that facilitate the derivation of exact solutions. This research builds on significant advancements by scholars who have dedicated substantial effort to develop and apply these methods across a broad spectrum of mathematical challenges. Notable examples include the double Laplace transform (R. R. Dhunde, Bhondge, & Dhongle, Citation2013; R. Dhunde & Waghmare, Citation2017; Eltayeb & Kilicman, Citation2010; Eltayeb & Kiliçman, Citation2013; Eshag, Citation2017), the double Laplace-Sumudu transform (S. A. Ahmed, Elzaki, & Hassan, Citation2020), the double Sumudu transform (Z. Ahmed, Idrees, Belgacem, & Perveen, Citation2019; Al-Omari, Citation2012; Eltayeb & Kilicman, Citation2010; Tchuenche & Mbare, Citation2007), the double Laplace-ARA transform(A. K. Sedeeg, Mahamoud, & Saadeh, Citation2022), the double ARA - Sumudu transform (Qazza, Burqan, Saadeh, & Khalil, Citation2022; Saadeh, Qazza, & Burqan, Citation2022), the double Elzaki transform (Idrees, Ahmed, Awais, & Perveen, Citation2018), the double Kamal transform (Sonawane & Kiwne, Citation2019), the double Shehu transform (Alfaqeih & Misirli, Citation2020), among others.
More recently, Saadeh et al (Saadeh, Qazza, & Burqan, Citation2020) introduced an innovative integral transform termed the ARA transform, formulated as follows:
(1.1)
(1.1)
The name "ARA" uniquely identifies this transform and is not an abbreviation. One of its distinctive properties is the ability to generate various integral transforms by altering the value of Additionally, as highlighted in Saadeh et al. (Citation2020), this transform effectively circumvents the singularity at
presenting a significant advantage for mathematical applications. Extensive research has been dedicated to the development and application of this transform; for instance, it has been applied by Saadeh et al (Burqan et al., Citation2021; Qazza, Burqan, & Saadeh, Citation2021) in solving complex fractional differential equations and fractional neutral pantograph equations. Furthermore, Abdelilah and colleagues have combined the ARA transform with the Laplace transform (A. K. Sedeeg et al., Citation2022) to address partial differential equations, and it has been integrated with the Sumudu transform by Qazza et al as well as Saadeh et al to tackle both integral and fractional equations effetively (Qazza et al., Citation2022; Saadeh et al., Citation2022). In a more recent study, Saadeh and colleagues (Saadeh, Sedeeg, Amleh, & Mahamoud, Citation2023) innovatively merged the ARA transform with the Laplace and Sumudu transforms to solve multi-variable partial differential equations, thereby confirming its efficacy as a tool for solving linear partial differential and integral equations.
Given the robust capabilities highlighted previously, we have adopted the new double ARA transform to solve both the regular and singular one-dimensional coupled Burgers’ equations. This work introduces an innovative analytical method, the DARAT, combined with the Adomian decomposition technique, providing the scientific community with a potent and reliable tool for addressing a broad spectrum of linear and nonlinear problems within the realm of partial differential equations (PDEs). The effectiveness of this approach is demonstrated through the graphical and tabulated solutions included in this paper, which not only underscore the method’s efficacy but also solidify its value as a significant asset in mathematical modeling and analysis. Although primarily yielding approximate numerical solutions that rapidly converge towards exact solutions, it’s important to note that there are certain limitations related to the conditions under which the method can be applied effectively.
The objective of this paper is to propose an analytical solution for one-dimensional regular and singular coupled Burgers’ equations using the double ARA decomposition method (DARADM), as referenced by (Eltayeb, Bachar, & Kılıçman, Citation2019; Mohamed, Hamza, & Sedeeg, Citation2023; Nee & Duan, Citation1998; Younis, Zafar, Ul-Haq, & Rahman, Citation2013). The coupled Burgers’ equations addressed are expressed as belows:
(1.2)
(1.2)
subject to
(1.3)
(1.3)
where
and
are unknown functions,
and
are given functions,
and
are parameters depend on the system characteristics such as Peclet number, Stokes velocity of particles due to gravity, and Brownian diffusivity.
Burgers’ equation serves as a potent model for various mathematical challenges, particularly in the context of fluid dynamics where phenomena such as shocks or viscous dissipation play crucial roles. The equation’s analytical solutions were first explored by Bateman in 1915. Named after Jan Burgers, who began his seminal work in 1939 and published in Citation1948, Burgers’ equation has been a fundamental tool in modeling turbulence and a myriad of other physical phenomena. These include, but are not limited to, shock flows, traffic flow, and acoustic transmission through fog. The significance of this equation extends across physics and other sciences, prompting ongoing research into its applications in modeling natural and biological phenomena, particularly in their fractional forms. Notably, Burgers’ equation has been applied in simple models of traffic flow, introduced independently by Lighthill-Whitham and Richards, and in coagulation theory. Its nonlinear nature makes it a valuable prototype for modeling diverse and seemingly unrelated phenomena such as shock flows, wave propagation in combustion chambers, vehicular traffic, and acoustic transmission.
This article is structured as follows: Section 2 outlines some fundamental aspects of the single ARA transformation of order one. Section 3 introduces the new double ARA integral transform and discusses some of its properties. Sections 4 and 5 apply the double ARA decomposition method to the one-dimensional Burgers’ equation, both in its singular and regular coupled forms. Section 6 presents three case studies where the double ARA decomposition method (DARADM) is applied. Finally, Sections 7 and 8 contain discussions of the results and conclusions of this study.
2. Facts and properties of single ARA transform of order one (Saadeh et al., Citation2020)
In this section we introduce the definition and basic facts about single ARA transform of order one.
Definition 2.1.
The ARA transformation of order one of piecewise continuous function on
is express by
(2.1)
(2.1)
For simplicity, let us denote by
Thus, the inverse single ARA transform is expressed as
(2.2)
(2.2)
The below theorem shows the existence condition for single ARA integral transform EquationEquation (2.1)(2.1)
(2.1) .
Theorem 2.1.
(Existence conditions). Let be exponential order bounded by
and piecewise continuous on
then
exists for
and satisfies:
(2.3)
(2.3)
where
is a positive constant.
In the following, we state some basic properties of single ARA transform.
Assume that and
and
Then:
(2.4)
(2.4)
(2.5)
(2.5)
(2.6)
(2.6)
(2.7)
(2.7)
(2.8)
(2.8)
(2.9)
(2.9)
(2.10)
(2.10)
(2.11)
(2.11)
(2.12)
(2.12)
The above results can be obtained from the definition of single ARA transforms and simple calculations.
3. Double ARA transform of order one (DARAT)
In this section, a new integral transform, DARAT. We present basic properties concerning the existence conditions, linearity, and the inverse of this transform. Moreover, some essential properties and results are used to compute the DARAT for some basic functions. We introduce the convolution theorem and the derivatives properties of the new transform.
Definition 3.1.
Let be continuous function of two positive variables
and
Then the DARAT of
is defined as
(3.1)
(3.1)
provided the integral exists.
Clearly, the DARAT is a linear integral transformation as shown below.
where
and
are constants and
and
exists and the inverse of the DARAT is given by:
(3.2)
(3.2)
In addition, Abdelilah and others, during their previous study, found that the relationship between the DL-ARA and the DARAT transforms is that the defined operator is a constant multiple of the operator defined in Sedeeg et al. (Citation2022).
Property 3.1.
Let and
Then:
Proof of Property 3.1.
Using the definition of ARA transform, we get
3.1. Double ARA transform of some elementary functions
In the following arguments, we introduce the Double ARA Transform for some basic functions.
Let
and
Let
Let
from Property 3.1 and EquationEq. (2.7)(2.7)
(2.7) , we get
Similarly,
Using the property of complex analysis, we have
Using Euler’s formulas and
and the formulas
and
Now, we find the DARAT of the following functions.
Let
where is Bessel function of order zero.
3.2. Existence conditions for double ARA transform
Let be function of exponential order
and
as
and
If there exists a positive
such that
and
we have
we can write
as
and
The below theorem shows the existence condition for double ARA integral transform EquationEq.(3.1)(3.1)
(3.1) .
Theorem 3.1.
(Saadeh, Citation2022) Let be a continuous function on the region
of exponential orders
and
Then
exists for
and
provided
and
3.3. Some theorems of double ARA transform
The below theorem shows the Shifting Property for ARA integral transform.
Theorem 3.2.
(Shifting Property). (Saadeh, Citation2022) Let be a continuous function and
Then
(3.3)
(3.3)
The below theorem shows the periodic function for ARA integral transform.
Theorem 3.3.
(Periodic Function). (Saadeh, Citation2022) Let exists, where
periodic function of periods
and
such that
then
(3.4)
(3.4)
The below theorem shows the ARA transform for Heaviside function.
Theorem 3.4.
(Heaviside Function). (Saadeh, Citation2022) Let exists and
then
(3.5)
(3.5)
where
is the Heaviside unit step function defined as
The below theorem shows the convolution theorem for ARA integral transform.
Theorem 3.5.
(Convolution Theorem). (Saadeh, Citation2022) Let and
are exists and
and
then
(3.6)
(3.6)
where
and the symbol
is denotes the double convolution with respect to
and
Now, we establish the double ARA transform of the functions
and
Theorem 3.6.
(Derivatives Properties). Let then
Proof of Theorem 3.6.
Using the definition of DARAT of we get
a)
(3.7)
(3.7)
By differentiating the both sides with respect to in EquationEq.(3.7)
(3.7)
(3.7) , we have
Calculating the partial derivative of second integral, we can get
(3.8)
(3.8)
Therefore,
(3.9)
(3.9)
c) Differentiating the both sides with respect to
in EquationEq.(3.8)
(3.8)
(3.8) , we have
Thus,
(3.10)
(3.10)
From EquationEquation (3.10)(3.10)
(3.10) , we have
Similarly, we can easily prove that:
e) Differentiating the both sides with respect to
in EquationEq.(3.8)
(3.8)
(3.8) , we have
Therefore,
From () and (
), we have
Now, we establish the double ARA transform of the derivatives
and
Theorem 3.7.
(Saadeh, Citation2022) Let then
Now, we establish the double ARA transform of the derivatives and
Theorem 3.8.
Let then
Proof of Theorem 3.8.
Using the definition of double ARA transform of we have
Differentiating the both sides with respect to
We calculate the partial derivative in second integral as follows:
(3.13)
(3.13)
Substituting EquationEquation (3.13)(3.13)
(3.13) into EquationEquation (3.12)
(3.12)
(3.12) , we get
Thus,
Using Theorem 3.7, we have
In a similar manner, one can prove that
4. Method of DARADM for solving one-dimensional Burgers’ equation
In this section, we use double ARA decomposition method (DARADM) for solving regular and singular one-dimensional Burgers’ equation.
4.1. DARADM for regular one-dimensional Burgers’ equation
Consider the regular one- dimensional Burgers’ equation of the general form
(4.1)
(4.1)
subject to
(4.2)
(4.2)
where
is unknown function,
and
are given functions and
and
are constants (Hamza & Elzaki, Citation2015).
Taking double ARA transform for both sides of EquationEquation (4.1)(4.1)
(4.1) , we have
(4.3)
(4.3)
Applying Theorem 3.7, and applying single ARA transform for initial condition in EquationEquation (4.2)(4.2)
(4.2) , we have
(4.4)
(4.4)
The double ARA decomposition method defines the solution of one- dimensional Burgers’ equation as by the infinite series.
(4.5)
(4.5)
We can give Adomian’s polynomials as follows:
(4.6)
(4.6)
In particular, the Adomian polynomials for the nonlinear term can be computed by the following equations.
Applying the inverse double ARA transform on both sides of EquationEquation (4.4)(4.4)
(4.4) , making use of EquationEquations (4.5)
(4.5)
(4.5) and Equation(4.6)
(4.6)
(4.6) , we have
(4.7)
(4.7)
On comparing both side of the EquationEquation (4.7)(4.7)
(4.7) we have
(4.8)
(4.8)
In general, the recursive relation is given by the following equations:
(4.9)
(4.9)
Provided the double inverse ARA transform with respect to and
exist for EquationEquations (4.7)
(4.7)
(4.7) —Equation(4.9)
(4.9)
(4.9) .
4.2. DARADM for singular one-dimensional Burgers’ equation
Consider the singular one- dimensional Burgers’ equation with Bessel operator of the form
(4.10)
(4.10)
and with initial conditions
(4.11)
(4.11)
where the linear terms
is Bessel operator and
and
are real constants,
is unknown function and
and
are given function.
Multiplying both sides of EquationEquation (4.10)(4.10)
(4.10) by
we get
(4.12)
(4.12)
Applying double ARA transform on both sides of EquationEquation (4.12)(4.12)
(4.12) , we get
(4.13)
(4.13)
Applying Theorems 3.7 and 3.8 and applying single ARA transform for initial condition, we have
(4.14)
(4.14)
Simplifying EquationEquation (4.14)(4.14)
(4.14) , we obtain
(4.15)
(4.15)
Integrating both sides of EquationEquation (4.15)(4.15)
(4.15) from
to
respect to
we have
(4.16)
(4.16)
Multiplying both sides of EquationEquation (4.16)(4.16)
(4.16) by
we get
(4.17)
(4.17)
Using double ARA decomposition method to define a solution of the system as by infinite series
(4.18)
(4.18)
Here the nonlinear operators can be defined as
(4.19)
(4.19)
In particular, the Adomian polynomials for the nonlinear terms and
can be computed by the following equations:
Applying the inverse double ARA transform on both sides of EquationEq. (4.17)(4.17)
(4.17) , making use of EquationEquations (4.18)
(4.18)
(4.18) and Equation(4.19)
(4.19)
(4.19) , we have
(4.20)
(4.20)
The first few components can be written as
(4.21)
(4.21)
(4.22)
(4.22)
Provided the double inverse ARA transform with respect to and
exist for EquationEquations (4.20)
(4.20)
(4.20) —Equation(4.22)
(4.22)
(4.22) .
5. Method of DARADM for solving one-dimensional coupled Burgers’ equation
In this section, we use double ARA decomposition method (DARADM) for solving regular and singular one-dimensional coupled Burgers’ equation.
5.1. DARADM for regular one-dimensional coupled Burgers’ equation
Consider the regular one-dimensional coupled Burgers’ equation of the form:
(5.1)
(5.1)
subject to
(5.2)
(5.2)
For Here,
are unknown functions,
and
are given functions,
and
are arbitrary constants depend on the system parameters such as Peclet number, Stokes velocity of particles due to gravity and Brownian diffusivity (Eltayeb et al., Citation2019).
Taking double ARA transform for both sides of EquationEquation (5.1)(5.1)
(5.1) , we have:
(5.3)
(5.3)
Applying Theorem 3.7, and applying single ARA transform for initial conditions in EquationEquation (5.2)(5.2)
(5.2) , we have
(5.4)
(5.4)
(5.5)
(5.5)
The double ARA decomposition method defines the solution of one- dimensional coupled Burgers’ equation as and
by the infinite series.
(5.6)
(5.6)
We can give Adomian’s polynomials
and
respectively as follows:
(5.7)
(5.7)
In particular, the Adomian polynomials for the nonlinear terms and
can be computed by the following equations:
Applying the inverse double ARA transform on both sides of EquationEquation (5.3)(5.3)
(5.3) and EquationEq.(5.4)
(5.4)
(5.4) , making use of EquationEquations (5.6)
(5.6)
(5.6) and Equation(5.7)
(5.7)
(5.7) , we have
(5.8)
(5.8)
and
(5.9)
(5.9)
On comparing both sides of the EquationEquation (5.8)(5.8)
(5.8) and EquationEq.(5.9)
(5.9)
(5.9) we have
(5.10)
(5.10)
In general, the recursive relation is given by the following equations:
(5.11)
(5.11)
and
(5.12)
(5.12)
Provided the double inverse ARA transform with respect to and
exist for EquationEquations (5.10)
(5.10)
(5.10) —Equation(5.12)
(5.12)
(5.12) .
5.2. DARADM for singular one-dimensional coupled Burgers’ equation
Consider the singular one- dimensional coupled Burgers’ equation with Bessel operator of the form:
(5.13)
(5.13)
and with initial conditions
(5.14)
(5.14)
where the linear terms
is known as Bessel operator,
are unknown functions,
are given functions and
and
are real constants (Eltayeb et al., Citation2019).
Multiplying both sides of EquationEquation (5.13)(5.13)
(5.13) by
we get
(5.15)
(5.15)
Applying double ARA transform on both sides of EquationEquation (5.15)(5.15)
(5.15) , we get
(5.16)
(5.16)
Applying Theorems 3.7 and 3.8, and applying single ARA transform for initial conditions in EquationEq. (5.14)(5.14)
(5.14) , we have
(5.17)
(5.17)
Simplifying EquationEquation (5.17)(5.17)
(5.17) , we obtain
(5.18)
(5.18)
Integrating both sides of EquationEquation (5.18)(5.18)
(5.18) from
to
respect to
we have
(5.19)
(5.19)
Multiplying both sides of EquationEquation (5.19)(5.19)
(5.19) by
we get
(5.20)
(5.20)
Using double ARA decomposition method to define a solution of the system as and
by infinite series
(5.21)
(5.21)
Here the nonlinear operators can be defined as
(5.22)
(5.22)
Applying the inverse double ARA transform on both sides of EquationEquation (5.20)(5.20)
(5.20) , making use of EquationEquations (5.21)
(5.21)
(5.21) and (5.22), we have
(5.23)
(5.23)
and
(5.24)
(5.24)
The first few components can be written as
(5.25)
(5.25)
and
(5.26)
(5.26)
(5.27)
(5.27)
provided the double inverse ARA transform with respect to
and
exist for EquationEquations (5.25)
(5.25)
(5.25) – Equation(5.27)
(5.27)
(5.27) .
6. Applications
In this section, we introduce the solution of one-dimensional Burgers’ equation, regular and singular one-dimensional coupled Burgers’ equation. All the following figures of selected examples are obtained using Mathematica software 13.
Example 6.1.
Consider the homogeneous regular one-dimensional Burgers’ equation
(6.1)
(6.1)
subject to
(6.2)
(6.2)
Using EquationEquations (4.8)(4.8)
(4.8) and Equation(4.9)
(4.9)
(4.9) , we have
In the same way, we get
Therefore, the exact solution of EquationEq.(6.1)(6.1)
(6.1) is given by
The following figures, and illustrates the 3D and 2D graph of exact and approximate solutions of Example 6.1 ().
Figure 1. The 3D graph of exact and approximate solutions of EquationEq. (6.1)(6.1)
(6.1) .
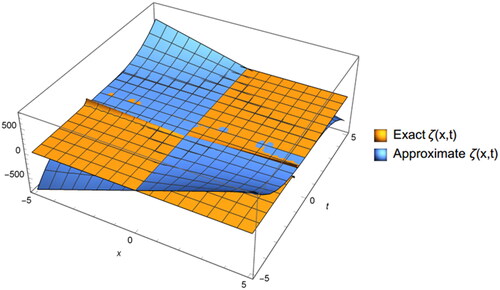
Figure 2. The 2D graph of exact and approximate solutions of EquationEq. (6.1)(6.1)
(6.1) .
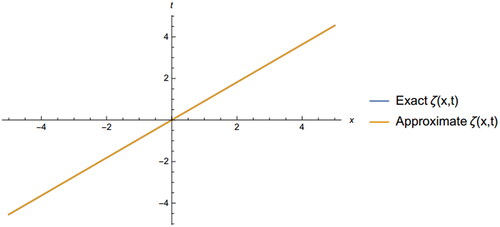
Table 1. Solution for the (first three approximations) with exact solution for example 6.1 at
Example 6.2.
Consider the homogeneous singular one-dimensional Burgers’ equation
(6.3)
(6.3)
subject to
(6.4)
(6.4)
By following similar above steps, we obtain
(6.5)
(6.5)
Using EquationEquations (4.21)(4.21)
(4.21) and Equation(4.22)
(4.22)
(4.22) the components are given by
In a similar way, we obtain
Thus, it is obvious that the self-canceling some terms appear among various components and following terms, then we have
Therefore, the exact solution is given by
The following figures, and illustrates the 3D and 2D graph of exact and approximate solutions of Example 6.2 ().
Figure 3. The 3D graph of exact and approximate solutions of EquationEq. (6.3)(6.3)
(6.3) .
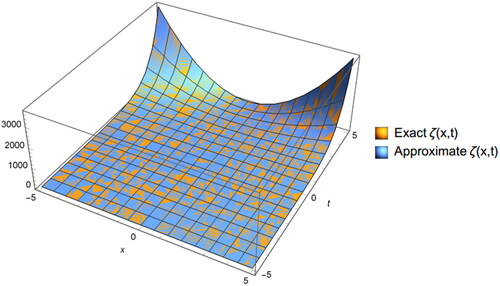
Figure 4. The 2D graph of exact and approximate solution of EquationEq. (6.3)(6.3)
(6.3) .
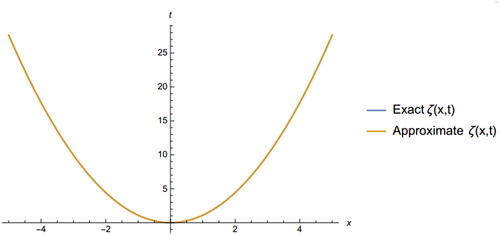
Table 2. Solution for the (first three approximations) with exact solution for example 6.2 at
Example 6.3.
Consider the homogeneous regular one-dimensional coupled Burgers’ equation
(6.6)
(6.6)
subject to
(6.7)
(6.7)
Using EquationEquations (5.10)(5.10)
(5.10) —Equation(5.12)
(5.12)
(5.12) , we have
And
and similar to the other components. Therefore, by using EquationEquation (5.6)
(5.6)
(5.6) , the series solutions are given by
and hence the exact solutions is
The following figures, and illustrates the 3D and 2D graph of exact and approximate solutions of Example 6.3 ().
Figure 5. The 3D graph of exact and approximate solutions of EquationEq. (6.6)(6.6)
(6.6) .
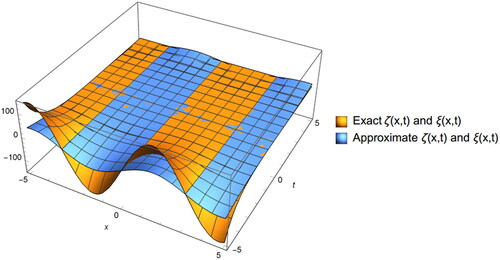
Figure 6. The 2D graph of exact solution of EquationEq. (6.6)(6.6)
(6.6) .
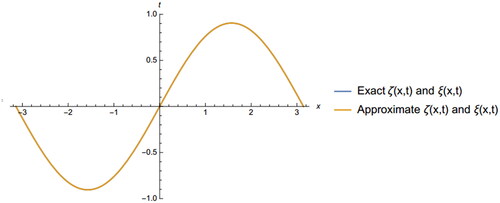
Table 3. Solution for the (first three approximations) with exact solution for example 6.3 at
Example 6.4.
Consider the homogeneous singular one-dimensional coupled Burgers’ equation
(6.8)
(6.8)
subject to
(6.9)
(6.9)
By following similar above steps, we obtain
(6.10)
(6.10)
And
(6.11)
(6.11)
Using EquationEquations (5.25)(5.25)
(5.25) —Equation(5.27)
(5.27)
(5.27) the components are given by
In a similar way, we obtain
In a similar way, we obtain
Thus it is obvious that the self-canceling some terms appear among various components and following terms, then we have
Therefore, the exact solution is given by
The following figures, and illustrates the 3D and 2D graph of exact and approximate solutions of Example 6.4 ().
Figure 7. The 3D graph of exact and approximate solutions of EquationEq. (6.8)(6.8)
(6.8) .
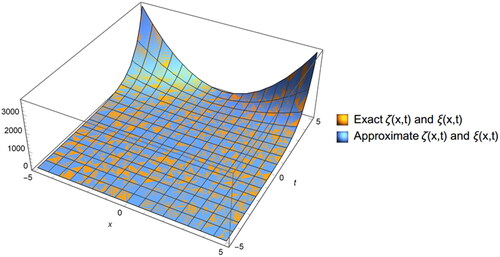
Figure 8. The 2D graph of exact and approximate solution of EquationEq. (6.8)(6.8)
(6.8) .
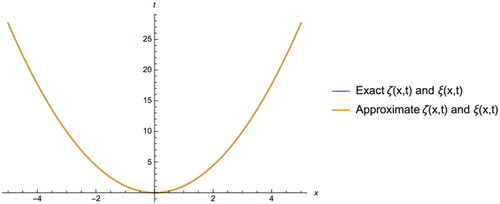
Table 4. Solution for the (first three approximations) with exact solution for example 6.4 at
7. Discussions of results
In this section, we discuss the results obtained, as illustrated by the figures and solution tables provided. It is evident that the solutions derived using the new method closely approximate the exact solutions, with a very small error rate. In some instances, the results were nearly identical, as demonstrated in the three examples selected. This precision is one of the most significant advantages of this method.
8. Conclusions
In this study, we have explored certain properties and conditions necessary for applying the double ARA transform. We employed the double ARA decomposition method a fusion of the double ARA and Adomian decomposition method to solve the one-dimensional regular and singular coupled Burgers’ equations. We presented three problems to validate the efficacy of this novel method. Furthermore, it is important to note that this double transform, when combined with iterative numerical methods, can also be used to address nonlinear problems and equations with non-constant coefficients, as direct solutions to nonlinear issues are not feasible with transforms alone unless paired with iterative techniques. Initial conditions must also be set to zero.
Looking ahead, I plan to apply this technique to investigate fractional differential equations and nonlinear time-fractional differential equations. Specifically, I aim to utilize this method for the Burgers’ equation with fractional derivatives, anticipating lower computational demands and higher accuracy. Future research will also explore the application of the Burgers’ fractional-order equation, given its extensive applications in physics and fluid dynamics. Additionally, I will examine the presence of concrete physical phenomena and validate any practical applications in real-world scenarios.
Acknowledgements
I would like to acknowledge my colleagues Holy Quran and Islamic Sciences University for their technical advice. The author expresses his gratitude to the editor and dear unknown reviewers and for their helpful suggestions, which improved the final version of this manuscript. The author extends his sincere thanks to Dr.Nauman Ali and Dr.Ahmed Elhassan for improving the language of the manuscript. He also thanks Professor Tariq Al-Zaki and Dr. Rania Saadeh for their general review of the manuscript. I also thank Dr. Jamal Derbali and Dr. Muhammad Zain for helping me with the physics aspect, drawing solutions, and preparing their tables. Finally, I do not forget to thank my student, Muneerah Al-Ghamdi, who provided me with moral and material support.
Disclosure statement
No potential conflict of interest was reported by the author.
References
- Ahmed, S. A., Elzaki, T. M., & Hassan, A. A. (2020). Solution of integral differential equations by new double integral transform (Laplace–Sumudu transform). Abstract and Applied Analysis, 2020, 1–7. doi:10.1155/2020/4725150
- Ahmed, Z., Idrees, M. I., Belgacem, F. M., & Perveen, Z. (2019). On the convergence of double Sumudu transform. Journal of Nonlinear Sciences and Applications, 13(3), 154–162. doi:10.22436/jnsa.013.03.04
- Alam, M. N., & Tunc, C. (2016). An analytical method for solving exact solutions of the nonlinear Bogoyavlenskii equation and the nonlinear diffusive predator-prey system. Alexandria Engineering Journal, 55(2), 1855–1865. doi:10.1016/j.aej.2016.04.024
- Alam, M. N., & Tunç, C. (2020). New solitary wave structures to the (2 + 1)-dimensional KD and KP equations with spatio-temporal dispersion. Journal of King Saud University - Science, 32(8), 3400–3409. doi:10.1016/j.jksus.2020.09.027
- Alfaqeih, S., & Misirli, E. (2020). On double Shehu transform and its properties with applications. International Journal of Analysis and Applications, 18(3), 381–395. doi:10.28924/2291-8639-18-2020-381
- Al-Omari, S. K. Q. (2012). Generalized functions for double Sumudu transformation. International Journal of Algebra, 6(3), 139–146.
- Burgers, J. M. (1948). A mathematical model illustrating the theory of turbulence. Advances in Applied Mechaincs, 1, 171–199. doi:10.1016/S0065-2156(08)70100-5
- Burqan, A., Saadeh, R., & Qazza, A. (2021). A novel numerical approach in solving fractional neutral pantograph equations via the ARA integral transform. Symmetry, 14(1), 50. doi:10.3390/sym14010050
- Constanda, C. (2018). Solution techniques for elementary partial differential equations (3rd ed.). New York: Chapman and Hall/CRC. doi:10.1201/9781315381442
- Dhunde, R. R., Bhondge, N. M., & Dhongle, P. R. (2013). Some remarks on the properties of double Laplace transforms. International Journal of Applied Physics and Mathematics, 3(4), 293–295. doi:10.7763/IJAPM.2013.V3.224
- Dhunde, R., & Waghmare, G. (2017). Double Laplace transform in mathematical physics. International Journal of Theoretical and Mathematical Physics, 7(1), 14–20. doi:10.5923/j.ijtmp.20170701.04
- Eddine, N. C., & Ragusa, M. A. (2022). Generalized critical Kirchhoff-type potential systems with neumann boundary conditions. Applicable Analysis, 101(11), 3958–3988. doi:10.1080/00036811.2022.2057305
- Eltayeb, H., Bachar, I., & Kılıçman, A. (2019). On conformable double Laplace transform and one dimensional fractional coupled Burgers’ equation. Symmetry, 11(3), 417. doi:10.5923/j.ijtmp.20170701.04
- Eltayeb, H., & Kilicman, A. (2010). On double Sumudu transform and double Laplace transform. Malaysian Journal of Mathematical Sciences, 4(1), 17–30.
- Eltayeb, H., & Kiliçman, A. (2013). A note on double Laplace transform and telegraphic equations. Abstract and Applied Analysis, 2013, 1–6. doi:10.1155/2013/932578
- Eshag, M. O. (2017). On double Laplace transform and double Sumudu transform. American Journal of Engineering Research, 6(5), 312–317.
- Evans, L. (2010). Partial differential equations (Vol. 19). American Mathematical Society. doi:10.1090/gsm/019
- Hamza, A. E., & Elzaki, T. M. (2015). Application of homotopy perturbation and Sumudu transform method for solving Burgers equations. American Journal of Theoretical and Applied Statistics, 4(6), 480. doi:10.11648/j.ajtas.20150406.18
- Idrees, M. I., Ahmed, Z., Awais, M., & Perveen, Z. (2018). On the convergence of double Elzaki transform. International Journal of Advanced and Applied Sciences, 5(6), 19–24. doi:10.21833/ijaas.2018.06.003
- Islam, S., Alam, M. N., Fayz-Al-Asad, M., & Tunç, C. (2021). An analytical technique for solving new computational solutions of the modified Zakharov-Kuznetsov equation arising in electrical engineering. Journal of Applied and Computational Mechanics, 7(2), 715–726.
- Mohamed, M. Z., Hamza, A. E., & Sedeeg, A. K. H. (2023). Conformable double Sumudu transformations an efficient approximation solutions to the fractional coupled Burger’s equation. Ain Shams Engineering Journal, 14(3) doi:10.1016/j.asej.2022.101879
- Nee, J., & Duan, J. (1998). Limit set of trajectories of the coupled Viscous Burgers’ equations. Applied Mathematics Letters, 11(1), 57–61. doi:10.1016/S0893-9659(97)00133-X
- Qazza, A., Burqan, A., & Saadeh, R. (2021). A new attractive method in solving families of fractional differential equations by a new transform. Mathematics, 9(23), 3039. doi:10.3390/math9233039
- Qazza, A., Burqan, A., Saadeh, R., & Khalil, R. (2022). Applications on double ARA–Sumudu transform in solving fractional partial differential equations. Symmetry, 14(9), 1817. doi:10.3390/sym14091817
- Saadeh, R. (2022). Applications of double ARA integral transform. Computation, 10(12) doi:10.3390/computation10120216
- Saadeh, R., Qazza, A., & Burqan, A. (2020). A new integral transform: ARA transform and its properties and applications. Symmetry, 12(6), 925. doi:10.3390/sym12060925
- Saadeh, R., Qazza, A., & Burqan, A. (2022). On the double ARA-Sumudu transform and its applications. Mathematics, 10(15) doi:10.3390/math10152581
- Saadeh, R., Sedeeg, A. K., Amleh, M. A., & Mahamoud, Z. I. (2023). Towards a new triple integral transform (Laplace–ARA–Sumudu) with applications. Arab Journal of Basic and Applied Sciences, 30(1), 546–560. doi:10.1080/25765299.2023.2250569
- Sedeeg, A. K. H. (2023). Some properties and applications of a new general triple integral transform “Gamar Transform. Complexity, 2023 doi:10.1155/2023/5527095
- Sedeeg, A. K., Mahamoud, Z. I., & Saadeh, R. (2022). Using double integral transform (Laplace-ARA transform) in solving partial differential equations. Symmetry, 14(11), 2418. doi:10.3390/sym14112418
- Sonawane, S. M., & Kiwne, S. B. (2019). Double Kamal transform: Properties and applications. Journal of Applied Science and Computations, 4(2), 1727–1739.
- Tchuenche, M. J., & Mbare, N. S. (2007). An application of the double Sumudu transform. Applied Mathematical Sciences, 1(1), 31–39.
- Younis, M., Zafar, A., Ul-Haq, K., & Rahman, M. (2013). Travelling wave solutions of fractional order coupled Burgers’ equations by (G′/G) - expansion method. American Journal of Computational and Applied Mathematics, 3(2), 81–85. doi:10.5923/j.ajcam.20130302.04
Appendix
Table A1. Here we present a list of the previous results double ARA transform of some special function and general properties.