
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
In this paper, we give a geometric construction for different allowable properties for sign pattern matrices. In Section 2, we give a construction for detecting a sign pattern matrix to be potentially nilpotent and also compute the nilpotent matrix realization for a given sign pattern matrix if it exists. In Section 3, we develop a geometric construction for potential stability. In Section 4, we establish a necessary and sufficient condition for a sign pattern matrix to be spectrally arbitrary. For a given sign pattern matrix of order
, we prove that there exists a surface of dimension at most
for
such that for every vector
on the same surface, there exists a matrix
, a qualitative class of
whose characteristic polynomial is
.
1. Introduction
A sign pattern matrix of order is an
matrix whose entries belong to the sign set
. A qualitative class of a sign pattern matrix
is denoted by
and is defined as
where is the
entry of a sign pattern matrix
. A property
of an
matrix is said to be an allowable property for a given sign pattern matrix
if there exists an
matrix
such that
satisfies property
. A sign pattern matrix
requires a property
if every matrix in
satisfies property
.
A permutation pattern is a square sign pattern matrix with entries and
, where the entry
occurs precisely once in each row and in each column. A signature sign pattern is a square sign pattern
having diagonal entries either
or
and off-diagonal entries
. Sign patterns
and
are said to be permutationally similar if there exists a permutation pattern matrix
such that
. Sign patterns
and
are said to be signature similar if there exists a signature sign pattern matrix
such that
. Two sign patterns are said to be equivalent if one of them can be obtained from other by using any combination of transpositions, permutation similarity and signature similarity. In 1947, an economist P. A. Samuelson considered special matrices while studying mathematical modeling of problems from economics. Entries of these matrices were signs instead of real numbers. Such matrices also arise in population biology, chemistry, sociology and many other situations. A study of these matrices falls under the branch of combinatorial matrix theory. In this paper, we have studied some of these qualitative matrix problems.
In Section 2, we have discussed about potentially nilpotent sign pattern matrices, computed nilpotent realization for a given sign pattern matrix if it exists, and also discussed about an index of nilpotency for computed nilpotent realizations. In Section 3, we have introduced the concept of arbitrary potentially stable sign pattern matrices, a method for detecting arbitrary potential stability of a sign pattern matrix. In the same section, we have characterized order 2 arbitrary potentially stable sign pattern matrices. In Section 4, spectrally arbitrary sign pattern matrices have been investigated. This section also generalizes some results from Section 2.
2. Potentially nilpotent sign pattern matrices
A non-zero matrix of order
is said to be nilpotent if there exists a positive integer
with
. The smallest positive integer
is called as an index of nilpotency for the matrix
.
Definition 2.1 (Hogben et al., Citation2018). A sign pattern matrix of order
is said to be potentially nilpotent if
allows a nilpotent matrix, i.e., there exists a nilpotent matrix in the qualitative class of
.
We will assign a one-to-one correspondence between vectors in and coefficients of a characteristic polynomial for a matrix in
. For a vector
, there is a characteristic polynomial
for some square matrix
of order
.
Definition 2.2 (Jadhav & Deore, Citation2022). Let be a given sign pattern matrix of order
. A matrix
is said to be a realization for a given vector
in
if the characteristic polynomial of
is
Here, we discuss about two open questions, the first question has been listed in Catral et al. (Citation2009) and Eschenbach and Johnson (Citation1988) and the second question which has not been directly appeared in the literature. Bergsma et al., Citation2012; Luo et al., (Citation2015) have discussed about potentially nilpotent sign pattern matrices. However, in Catral et al. (Citation2009), we observe that the nilpotent-Jacobian method for proving spectral arbitrariness of a given sign pattern matrix requires the explicit computation of the nilpotent matrix from the qualitative class of a given sign pattern matrix.
Question 1. Is a sign pattern matrix potentially nilpotent?
If we want to check whether a given sign pattern matrix is potentially nilpotent, it is sufficient to find a matrix realization for the vector
.
Question 2. If a sign pattern is potentially nilpotent, then how do we find a nilpotent matrix in the qualitative class of
?
In Theorem 2.4, we prove the sufficient condition for sign pattern matrices to be potentially nilpotent. Throughout this article, the characteristic polynomial of a square matrix will be denoted by
.
Lemma 2.3 (Jadhav & Deore, Citation2022). Let and
be two
matrices over the field of real numbers such that they vary either in a fixed row or in a fixed column. Then
Above lemma is easy to prove and can be extended to the convex linear combination of matrices.
Theorem 2.4. Let be a sign pattern matrix of order
. Suppose
and
are two matrices in
such that
and
vary exactly either in one row or in one column. If the vectors correspond to
and
are with same magnitude and in opposite direction of each other, then a sign pattern
is potentially nilpotent.
Proof. Suppose that matrix realizations and
vary exactly either in a row or a column. Let
and
be the characteristic polynomials of
and
, respectively, so that the vector
corresponds to matrix
and the vector
corresponds to matrix
. Now, by hypothesis, we have
, i.e.,
. From Lemma 2.3, the characteristic polynomial of the matrix
is given by
. Since
, we have
. This shows that
is nilpotent and
. Thus,
gives a required nilpotent matrix realization for a sign pattern
. Hence,
is potentially nilpotent.
A generalization of Theorem 2.4 is the following.
Theorem 2.5. Let be a sign pattern matrix of order
. Suppose
and
are matrices in
such that
,
vary exactly either in one row or in one column. If
and
are the vectors corresponding to
and
, respectively, and satisfy
for some
, then
is a potentially nilpotent sign pattern matrix.
Proof. In view of Lemma 2.3, the characteristic polynomial of is
. As
and
are realizations of vectors
and
such that they vary exactly in a row or a column, the matrix
is a realization for the vector
. Also,
. Thus,
is the required nilpotent matrix. Hence, the result.
Remark 1. Considering an appropriate convex linear combination, Theorem 2.5 holds for any number of matrices.
Example 2.1. Consider an example of a sign pattern matrix of order 5 as given below
Lemma 2.6. If nilpotent matrices and
of order
vary only in a row or in a column, then
is nilpotent for all
.
Proof. As and
are nilpotent matrices of order
, the characteristic polynomial of
and
is
. Thus, Lemma 2.3 says that the characteristic polynomial of
is
for all
. Hence, the matrix
is nilpotent for every
.
Lemma 2.7. Let and
be square matrices that vary exactly either in a row or in a column and
. Then,
for all
.
Proof. If and
vary exactly in the
column, then by splitting determinant of
along the
column, we get
for all
, hence the result.
Remark 2. For square matrices and
, the determinant of
is zero for all
if determinant of
and
is zero with
and
varying exactly either in a row or in a column.
We denote the column of a matrix
by
for all values of
in the proof of the following Lemma. Now, we analyze an index of nilpotent matrices obtained from the construction as given in Theorems 2.4 and 2.5.
Lemma 2.8. Let and
be square matrices of order
with rank
such that they vary exactly in a row or in a column. Then, rank of
is either
for all
or
for some
.
Proof. The rank of a matrix is preserved under permutation similarity. Without loss of generality, assume that matrices and
vary in the last column. Let
be the columns of
and let
be the columns of
. As
, we have the following two cases:
Case 1. Column does not belong to a set of linearly independent columns of
. By rearranging the columns (if necessary), assume that the first
columns of
are linearly independent. Thus, remaining
columns are linearly dependent on first
columns. Hence, we have
and
. Therefore, the
column of
, i.e.,
where
for all
. Thus, in a matrix
, the
column is linearly dependent on its first
columns, and the remaining columns are already linearly dependent on first
columns, as they are the same as in matrices
and
. It follows that the rank of
is
.
Case 2. Column belongs to the set of linearly independent
columns. In this case for all
, if the column
is linearly independent to remaining
linearly independent columns, then rank of
still remains as
. Otherwise, for some
, the column
is linearly dependent on remaining
linearly independent columns, and then the rank of
is
for these values of
.
By the rank-nullity theorem, for a nilpotent matrix of rank , the dimension of its kernel space is
; it means that the dimension of the eigenspace corresponding to an eigenvalue
is
. Hence, the number of Jordan blocks corresponding to an eigenvalue
, which is equal to the geometric multiplicity of an eigenvalue
, has to be
. Therefore, the largest possible size of a Jordan block is
, and when we distribute
over
blocks almost equally, the minimal possible size of a larger Jordan block amongst them is
(where
denotes the smallest integer but not smaller than
). Now for any nilpotent matrix, its index is nothing but the size of a larger Jordan block in its Jordan canonical form. Hence, the index of nilpotency for a rank
nilpotent matrix is at most
and at least
.
Theorem 2.9. Let be a sign pattern matrix of order
. The nilpotent realization
of
obtained by Theorems 2.4 and 2.5 has index of nilpotency at most
or
and at least
or
for matrices
and
of rank
.
Proof. Given that is a nilpotent matrix realization of a sign pattern matrix
, computed by Theorem 2.4 or 2.5. Moreover,
and
are matrices of rank
. By using Lemma 2.8, the nilpotent matrix
has rank
or
. Therefore, as discussed in the above paragraph before Theorem 2.9, we conclude that the index of nilpotency for a matrix
is at most
or
and at least
or
.
In example 2.1, we observe that the index of nilpotency for the matrix is
.
3. Potentially stable sign pattern
An matrix
is said to be a stable matrix if all of its eigenvalues have negative real parts. A sign pattern
is said to be potentially stable if it allows stability, i.e., there exists a stable matrix in its qualitative class. Grundy et al. (Citation2012) discussed about constructions of potentially stable sign pattern matrices. Cavers (Citation2021) used polynomial stability to show that certain sign patterns are not potentially stable. In this section, we are introducing arbitrary potential stability of sign pattern matrices.
Let be an
matrix with real entries. If all eigenvalues of
have negative real parts, then all the coefficients of its characteristic polynomial are positive. Let
and
be stable matrices of order
. Is
a stable matrix?
Example 3.1. Let and
. Then
and
are stable matrices, and they differ only in the first row, but
is not stable.
But nevertheless, we have the following result true.
Theorem 3.1. Let be a sign pattern matrix. Suppose
and
are two stable matrices in the qualitative class
such that they vary either in a row (or a column). Then, real eigenvalues of
for
are negative.
Proof. Without loss of generality, assume that matrices and
vary in the
row. Since
and
are stable matrices, all eigenvalues of
and
have negative real parts. Hence, all the coefficients of the characteristic polynomial of
as well as the coefficients of the characteristic polynomial of
are positive. Let
and
be characteristic polynomials of
and
, respectively, where all
s and
s are positive. Let
. By Lemma 2.3, the characteristic polynomial
As all s and
s are positive, we have
is positive for all
. If a real number
is an eigenvalue of
, then from EquationEquation 1
(1)
(1) , we have
which is not possible as the left hand side of the above equation is non-negative, but the right hand side is strictly negative. Hence, every real eigenvalue of has to be negative.
Remark 3. Theorem 3.1 can also be extended to matrices corresponding to
unit vectors surrounding a hyperoctant in
.
We give here the sufficient condition for potential stability of a sign pattern matrix of order . Note that the proof of the following theorem is essentially as similar to the proof of Theorem 2.7 given in Jadhav and Deore (Citation2022). For the sake of completeness, we have incorporated the same.
Theorem 3.2. Let be a sign pattern matrix of order
. Suppose there exist matrices
in
, which are realizations of the vectors
respectively. Further, assume that all these matrices
vary exactly either in a row or in a column. Then the sign pattern
is potentially stable.
Proof. We shall prove that every point lying in the hyperoctant surrounded by the vectors (denote it by
) is realized by a matrix in
. Let
be any point lying in the hyperoctant
. Consider the curve
for all
and part of the plane
lying in the hyperoctant
. Note that the plane and the curve intersect exactly at one point say
. Assume that the point
corresponds to
on the curve. Also, note that
. As
are realizations for the vectors
, in
, by Lemma 2.3, every point on the convex linear combination of
has a matrix realization lying in
. Thus,
has a matrix realization say
in
. But then
lying in
, provides a matrix realization for the point
. So every point in the hyperoctant
has a matrix realization in
.
In particular, the point lies in the hyperoctant
; hence, it has a matrix realization in
. Also, polynomial corresponding to this point is
; this proves
is potentially stable sign pattern.
Let us illustrate the above theorem with the help of an example.
Example 3.2. Consider a sign pattern matrix of order as given below:
Consider a realization in a qualitative class of
where
are positive real numbers. Its characteristic polynomial is given as follows
Now to find the values of and
so that the polynomial
in 2 corresponds to a vector
, i.e, it becomes
. Equating
with
, we get a system of linear equations in variables
and
. Solving this system of equations, we get
. Therefore, we get a matrix
in the qualitative class of
whose characteristic polynomial is
. Similarly, we obtained the matrices
,
,
and
having the characteristic polynomials
and
, respectively. Observe that all the matrices
have the same sign pattern and they vary only in the first row. Also they are realizations of vectors
, respectively. Hence, by Theorem 3.2, a sign pattern matrix given by
is potentially stable.
Remark 4. Theorem 3.2 says something extra rather than only saying potential stability of a sign pattern matrix . Potential stability means that a sign pattern allows a stable matrix. But for sign pattern matrices whose potential stability is proved by Theorem 3.2, we have for any size
multiset of complex numbers with real parts negative and closed under complex conjugation, there exists a matrix in
whose set of eigenvalues is the given multiset. Therefore, a sign pattern
allows all possible stable matrices which have the sign pattern as that of
.
Definition 3.3. A square sign pattern matrix is said to be an arbitrary potentially stable sign pattern if for every multiset of
complex numbers with real parts negative and closed under complex conjugation, there exists a matrix in
whose set of eigenvalues is the given multiset.
A sign pattern given in Example 3.2 is arbitrary potentially stable. A potentially stable sign pattern matrix is not need to be arbitrary potentially stable, and we can see the same in the following example.
Example 3.3. Consider a sign pattern given by . From Catral et al. (Citation2009), we note that
allows a stable matrix specifically
, so it is potentially stable. Consider a realization of
obtained by replacing all non-zero entries by variables say
where
are all positive real numbers. The matrix
corresponds to a vector
. By equating vector
with
, we get
and
. Substituting back the value of
, we observe that
and
, which is not possible. Thus, a vector
can never be equal to
. It means a vector
can never be realized by a matrix in the qualitative class of sign pattern
. Thus, a polynomial
can never be a characteristic polynomial of any matrix in the qualitative class of
. Thus,
is not arbitrary potentially stable.
However, Theorem 3.2 gives only a sufficient condition for an arbitrary potentially stable sign pattern. It is not a necessary condition, observed from the following example of order sign pattern matrix.
Example 3.4. Consider a sign pattern matrix .Let
be a matrix realization of sign pattern
, where
are all positive real numbers. This matrix
corresponds to a vector
. It can be observed that for any vector lying in the second quadrant
, there exist values of
with
and
. It means that a sign pattern
is an arbitrary potentially stable sign pattern matrix. If we equate vector
with
, we get
and
. As being all
are positive real numbers, we cannot have a solution to
. Similarly, vector
cannot be equal to
, so that Theorem 3.2 is not applicable but still sign pattern
is arbitrary potentially stable.
Now, we will give the characterizations of arbitrary potentially stable sign pattern matrices. It should be noted that every spectrally arbitrary sign patterns (Definition 4.1) are always arbitrary potential stable.
Theorem 3.1. A sign pattern matrix is arbitrary potentially stable if it is a transposition or a permutation similarity equivalent to any of the following sign patterns
Proof. A sign pattern matrix is arbitrary potentially stable as being spectrally arbitrary. Working out as in Example 3.4, we get sign pattern matrices
are arbitrary potentially stable. Now, sign pattern matrices containing either four zero or three zero entries cannot be potentially stable as being every matrix in their qualitative class has zero determinant. Similarly, sign pattern matrices having two zero entries in the same row or in the same column cannot be potentially stable as being zero determinant. Sign pattern matrices having two zero entries on the diagonal cannot be potentially stable as being every matrix in their qualitative class has trace zero. Similarly, sign pattern matrices
and
, where
denotes either
or
, cannot be potentially stable, as matrices in their qualitative class have either positive trace or negative determinant. Let
be any matrix in the qualitative class of a sign pattern matrix
, where
are positive real numbers. It has a corresponding vector
in
. If we equate
, then there is no solution with
and
in positive real numbers. However, the roots of the polynomial
have negative real parts. Thus, a sign pattern matrix
is not arbitrary potentially stable. Similarly, it can be proved that the remaining order
sign pattern matrices cannot be arbitrary potentially stable.
It should be noted that an arbitrary potential stability is not preserved under signature similarity, as explained in the following example.
Example 3.2. Consider an arbitrary potentially stable sign pattern matrix and a signature matrix
. Then,
, which is not arbitrary potentially stable because every matrix in the qualitative class of
has positive trace.
4. Spectrally arbitrary sign pattern matrices
Definition 4.1 (Catral et al., Citation2009). A sign pattern matrix of order
is said to be spectrally arbitrary if every monic polynomial of degree n is the characteristic polynomial of some matrix
in the qualitative class of
.
Henceforth, we will denote the columns of a square matrix by
.
Let and
be any two square matrices of order
. We denote
and
, the matrices formed by using the columns of
.
Lemma 4.2. For any two square matrices and
of order
,
Proof. With the above notations, the matrix Therefore, the characteristic polynomial of
is
Hence the result.
In the above lemma, the sum of the coefficients of the terms on the right hand side of an expression in EquationEquation 3(3)
(3) is 1.
Example 4.3. Let be a sign pattern matrix of order 2. Then,
is spectrally arbitrary by Catral et al. (Citation2009). Let
,
be square matrices of order
in the qualitative class of
. Then, we can observe that
,
. Also,
. Note that matrices
are in
, a qualitative class of
. The matrices
,
and
correspond to the vectors
,
and
, respectively.
Theorem 4.4 (Jadhav & Deore, Citation2022). Let be a potentially nilpotent sign pattern matrix of order
and let
be the unit vectors along the axes. Suppose there exist at least
matrices which are realization of these
vectors corresponding to a sign pattern
. If
matrices corresponding to
vectors surrounding each hyperoctant differ only in one fixed row (or column), then the sign pattern
is spectrally arbitrary. Moreover, any particular non-nilpotent matrix realization can be constructed as an affine combination of matrices corresponding to a hyperoctant (i.e., the unit vectors).
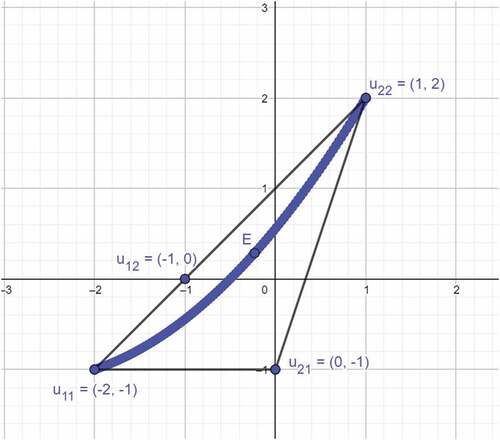
We can visualize all these four vectors in the above figure, wherein the region bounded by the quadrilateral contains the origin in its interior. Moreover, any two matrices corresponding to the adjacent vertices in Figure 4.3 vary only in a column. Thus, by Theorem 4.4, a sign pattern is spectrally arbitrary.
Theorem 4.5. Let be a sign pattern matrix of order
. Let
such that the vectors corresponding to
are
. Then, there exists a curve in
joining the points
and
, such that every point on this curve is realizable by a sign pattern matrix
.
Proof. Let and
be the matrices correspond to the vectors
in
. Then from Lemma 4.2,
for
. If we consider the same affine combination of the corresponding vectors, then we get a vector
, which has a matrix realization
in
for each
. Hence,
for
establishes the required realizable curve in
joining the points
and
.
In Figure , the curve traced by lies in the affine combination of the vectors
.
Figure 1. Quadrilateral formed by vertices The image is plotted by using open source software “GeoGebra”
Let and
be any two square matrices of order
. We denote
and
, the matrices formed by using columns of matrices
and
. Then, we have the following.
Lemma 4.6. Let and
be any two square matrices of order
. Then
Proof. Proof follows by the multilinearity property of the determinant function, similar to proof of Lemma 4.2.
We observe that the sum of the coefficients of the terms from right hand side of EquationEquation 4(4)
(4) is
Let be any square sign pattern matrix of order
and
. Then, the matrices constructed from
and
as above are also in
. As per the correspondence, suppose these eight matrices
and
correspond to vectors
and
in
, respectively. If we plot all these eight vectors as vertices, and two vertices are adjacent if and only if the corresponding matrices vary only in one column, then we get a graph isomorphic to the following graph in
as shown in Figure .
Figure 2. Graph formed by vertices The image is plotted by using open-source software “GeoGebra”.
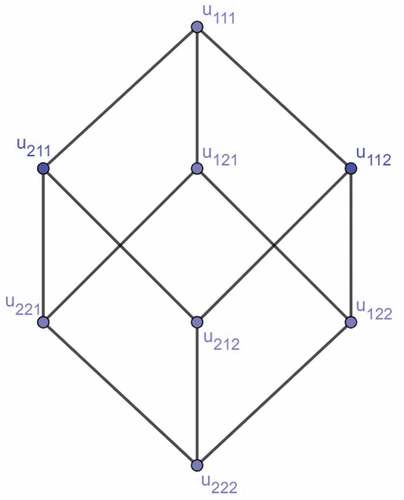
From Lemma 2.3, as the matrices corresponding to the adjacent vertices vary only in a column, all the vectors lying on edges of the above graph are realizable by a sign pattern matrix . In view of Lemma 4.6, a vector inside the convex linear combination of vectors
of the type
, for some
is realizable by a sign pattern matrix
. Therefore, there exists a curve joining the points
and
such that every point on the curve is realizable by a sign pattern matrix
.
Example 4.7. Consider , a square sign pattern matrix of order
. Let
and
be two matrices in
. Then,
If we choose
, then a vector
becomes
which has a matrix realization as
.
Let and
be square matrices of order
, say
and
. Construct an another matrix
by using columns of
and
. More specifically, the
column of the matrix
is either
or
for
, then there are
such possible matrices. For
, let us denote
be the matrix, whose
column is the
column of the matrix
, for
.
Theorem 4.8. Let and
be two square matrices of order
. Then
where and
.
Proof. Proof follows by multilinearity property of the determinant function.
We would like to mention that Lemma 2.3 is a special case of Theorem 4.8. If is a square sign pattern matrix of order
and the matrices
, then the number of matrices obtained from
and
as above is
. All these matrices are the members of
. Moreover, these
matrices correspond to
vectors in
. Two of these vectors can be joined by an edge if the corresponding matrices vary only in a column so that we get a graph on
vertices in which degree of each vertex is at least
. We can observe that a point on every edge is realizable by a sign pattern matrix
, and also a vector which can be expressed as an affine combination of the type as in Theorem 4.8 for some
is also realizable.
Theorem 4.9. Let be a sign pattern matrix of order
. Let
and let
and
be vectors in
corresponding to matrices
and
, respectively. Then, there exists a curve with every point on that curve is realizable by a sign pattern matrix
.
Let and
be any three square matrices of order
over the set of real numbers. Forming a matrix
by using
and
, where the first column of
is the first column of
or
or
. Similarly, the second and third columns of
is the second and third respective columns of
or
or
. Then, there are
such possibilities for matrix
. Let us denote
be the matrix whose first column is the first column of
, second column is the second column of
and the third column is the third column of matrix
where
, e.g., the matrix
, etc.
Theorem 4.10. Let and
be any three matrices of order
. Then
Proof. Proof follows by multilinearity property of the determinant function.
Let be a sign pattern matrix of order 3 and let
and
be any three matrices lying in
. Let
be matrices as defined above. Note that
. Assume that for each
, the matrix
corresponds to the vector
in
. Consider a graph in
with vertices
and two of the vertices are joined by an edge if and only if the corresponding matrices differ only in one column. Then, we get a graph isomorphic to a graph on
vertices with a degree of each vertex is at least
. Every point on this edge is realizable by a matrix in
. Also, a vector which can be expressed as an affine combination of the type as in EquationEquation 5
(5)
(5) of Theorem 4.10 for some
and
is realizable. In this case, we may get a degree of freedom at most
. Thus, we have the following statement true.
Theorem 4.11. Let be a sign pattern of order
. Let
and
be any three matrices in
. Assume that matrices
and
correspond to vectors
and
, respectively. Then there exists a curve or a surface in
such that every point on that curve or surface is realizable by a sign pattern
.
In general, if we have three matrices of order , then we have the following result.
Theorem 4.12. Let and
be any three matrices of order
. Then
Let be a sign pattern matrix of order
, let
and
be any three matrices in
and let matrices
be constructed as above. Note that all these matrices
are in
. Assume that the matrix
corresponds to a vector
in
for each
. If we consider a graph with vertices as these
points
and connect two of these vertices by an edge if and only if the corresponding matrices vary only in a column. Then, the graph will have at least
edges. Note that every point on this edge is realizable by a sign pattern
. Also, a vector which can be expressed as an affine combination of the type as in EquationEquation 6
(6)
(6) of Theorem 4.12, for some
and
, is realizable. Observe that degree of freedom is at most
.
Theorem 4.13. Let be a sign pattern matrix of order
. Let
and
be any three matrices in
. Assume that matrices
and
correspond to the vectors
and
respectively. Then, there exists a surface of dimension at most
in
such that every point on that surface is realizable by a sign pattern
.
In general, we can consider matrices say
of order
, where
. For each
, a matrix
is constructed by using
, i.e., the
column of
is the
column of
for
. So we get
such possible matrices.
Theorem 4.14. With the above notations, we have
Let be any sign pattern matrix of order
and
be any
matrices in
. Then, we get at most
dimensional surface in
with every point on that surface is realizable by a sign pattern matrix
.
Theorem 4.15. Let be a sign pattern matrix of order
. Let
be any
matrices in
where
. Then,there exists a surface of dimension at most
in
such that every point on that surface is realizable by a sign pattern
.
It should be noted that if is a sign pattern matrix of order
and
are any
matrices lying in
where
, then there exists at most
-dimensional surface in
such that every point in that surface is realizable by a sign pattern
.
Let be a sign pattern matrix of order
. Let
and
be any two matrices in
. Let
be the matrix whose
column is the
column of the matrix
if
otherwise is the
column of the matrix
, for all
.
Theorem 4.16. With the above notations, we have
where the hat notation denotes the deletion of that entry from the sequence.
Proof. The proof follows by multilinearity property of the determinant function.
Theorem 4.17. Let be a sign pattern matrix of order
,
and
be any two matrices in
and
be matrices as defined above for
. Then
where the hat notation denotes the deletion of that entry from the sequence and each satisfies
and
.
Suppose the matrix has the corresponding vector
for each
, then every vector in
which satisfies an affine linear combination as given in EquationEquation 9
(9)
(9) of Theorem 4.17 will also belong to
. This implies that there exists at most
dimensional surface in a convex linear combination of these vectors
such that every point on that surface is realizable by the matrix in
.
Definition 4.18. If the surface generated by the vectors by using the affine linear combination as given in EquationEquation 9
(9)
(9) of Theorem 4.17 has dimension
, then it is called a solid, we denote this solid by
.
If we plot a graph in with vertices
for
, and two of the vertices are connected by an edge if and only if the corresponding matrices differ only in one column, then we get a graph on
vertices with degree of each vertex is at least
. For a fixed value of
either
or
, the vertices
for all
form the vertices of one of the faces. Theorem 4.17 is valid for corresponding to these
matrices as well.
Example 4.19. Consider a sign pattern matrix . Let
and
be two matrices from
. Then, we get the set of eight vectors
. It is easy to verify that vectors
are co-linear and vectors
are also co-linear as shown in the following Figure . Hence, these sets of eight vectors span the two-dimensional surface in
.
Figure 3. The image is plotted by using open-source software “GeoGebra”.
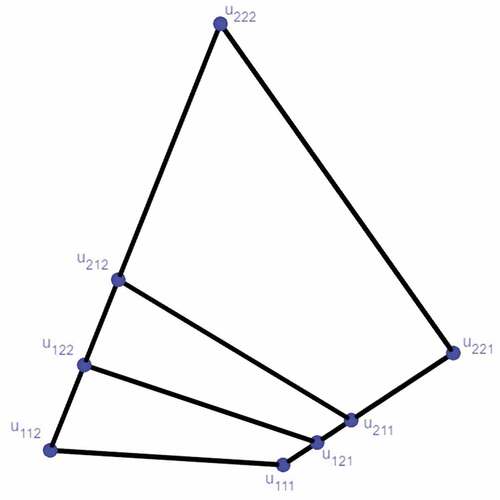
The above example shows that these vectors in
may span lesser than
dimensional surface.
Definition 4.20. Let be a sign pattern matrix of order
. We shall denote the set of all realized vectors of a sign pattern
by
and is defined as
Lemma 4.21. Let be a sign pattern matrix of order
. If
, then
also lies in
, for all
.
Proof. As , so there exists a matrix realization say
for the vector
in
. Therefore, the characteristic polynomial of a matrix
is
. But then the characteristic polynomial of
would be
for all
. Thus, the vector
has a matrix realization
for all
in
. Hence,
for all
.
Using Lemma 4.21, we can give a sufficient condition for a sign pattern matrix to be spectrally arbitrary.
Theorem 4.22. Let be a potentially nilpotent sign pattern matrix of order
. If every point
on the unit sphere
lies in
, then
is spectrally arbitrary.
Proof. It is enough to prove that every non-zero point in lies in
. For that, let
be any non-zero point in
. Consider the curve
for
. This curve will intersect the unit sphere say at
. Therefore, by the hypothesis
. Thus by Lemma 4.21,
.
It should be noted that if is a spectrally arbitrary sign pattern matrix, then obviously
. Thus, the above theorem establishes a necessary and sufficient condition for a potentially nilpotent sign pattern matrix to be spectrally arbitrary. We have used the unit sphere
in the above theorem. However, any
-dimensional closed surface which encloses the origin in its interior would also work. If any such a closed surface lies in
, then the unit sphere
would also belong to
.
Theorem 4.23. Let be a nilpotent sign pattern matrix of order
, and let
and
be any two matrices such that they generate a solid
lying in
. If
contains the origin in its interior, then a sign pattern
is spectrally arbitrary.
Proof. Such a dimensional solid lying in the qualitative class of
has its closed boundary surface of dimension
with the origin
lying in its interior. Then,
belongs to the qualitative class of
, and thus by Theorem 4.22, a sign pattern
is spectrally arbitrary.
Finally, we discuss a very general case. Let be a sign pattern matrix of order
. Let
be any
matrices belonging to the qualitative class of
. Let
be the matrix whose
column is the
column of matrix
for
and
. Then, there are
such possible matrices. Similar to Theorem 4.17.
Theorem 4.24. With the above notations, we have
Proof. Proof basically uses the multi-linearity property of the determinant function.
Assume that the matrix corresponds to the vector
in
. We can consider a graph with these
vectors as points in
, and two of these points are joined if and only if matrices corresponding to them vary only in one column. So we get a graph containing a sub-graph isomorphic to the graph having
vertices and degree of each vertex is at least
. Theorem 4.24 says that every point which satisfies the affine combination as given above will also belong to the qualitative class of
. Thus, we get at most
dimensional surface in
lying in the qualitative class of
for
. If
, then dimension of an affine surface generated by considering an affine combination given in Theorem 4.24 is at most
. If it has dimension exactly
, then it is a solid, and we denote this solid by
.
Theorem 4.25. Let be a nilpotent sign pattern matrix of order
. Let
be any
matrices such that they generate a solid
lying in the qualitative class of
. If
contains the origin in its interior, then the sign pattern
is spectrally arbitrary.
Proof. The proof is similar to the proof of Theorem 4.23.
5. Open question
In Section 4, we may raise an open question “If the set of vectors for
spans
, then the surface
is a solid of dimension
”.
Acknowledgment
The authors would like to express their sincere gratitude to the learned referees for their valuable comments and suggestions.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Bergsma, H., Meulen, K. N. V., & Tuyl, A. V. (2012). Potentially nilpotent patterns and the Nilpotent-Jacobian method. Linear Algebra and Its Applications, 436(12), 4433–14. https://doi.org/10.1016/j.laa.2011.05.017
- Catral, M., Olesky, D. D., & van den Driessche, P. (2009). Allow problems concerning spectral properties of sign pattern matrices: A survey. Linear Algebra and Its Applications, 430(11–12), 3080–3094. https://doi.org/10.1016/j.laa.2009.01.031
- Cavers, M. (2021). Polynomial stability and potentially stable patterns. Linear Algebra and Its Applications, 613, 87–114. https://doi.org/10.1016/j.laa.2020.12.015
- Eschenbach, C., & Johnson, C. R. (1988). Research problems several open problems in qualitative matrix theory involving eigenvalue distribution. Linear and Multilinear Algebra, 24(1), 79–80. https://doi.org/10.1080/03081088808817900
- Grundy, D. A., Olesky, D. D., & van den Driessche, P. (2012). Constructions for potentially stable sign patterns. Linear Algebra and Its Applications, 436, 4473–4488. https://doi.org/10.1016/j.laa.2011.08.011
- Hogben, L., Hall, & Li. (2018). Sign pattern matrices, handbook of linear algebra. chapman and hall/CRC, Taylor and Francis Group. 2, 33.
- Jadhav, D. S., & Deore, R. P. (2022). A geometric construction for spectrally arbitrary sign pattern matrices and the 2n-conjecture. Czechoslovak Mathematical Journal.
- Luo, J., Huang, T. Z., Li, H., Li, Z., & Zhang, L. (2015). Tree sign patterns that allow nilpotence of index 4. Linear and Multilinear Algebra, 63-5, 1009–1025. https://doi.org/10.1080/03081087.2014.914930