
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
The singularly perturbed parabolic equations with non-smooth convection coefficient, discontinuous source term, and a large negative spatial shift are studied in this paper. The implicit Euler method for the temporal direction and the fitted extended cubic B-spline collocation method for the spatial direction are applied to formulate a parameter-uniform numerical method. The proposed scheme is proven to be accurate with a linear order of convergence. Two test examples are examined to verify the presented numerical method. The computational findings obtained by the developed method confirm the theoretical estimates. The obtained findings provide more accurate results than methods found in the literature.
1. Introduction
Many physical phenomena are modeled using delay differential equations (DDEs), which are influenced by both the current state of the system and its history. This is occasionally required to include previous states of the system as well as the current state. DDEs are extremely useful when the rate of change of a phenomenon is dependent on a past state. Such equations are used in numerous scientific fields, including population dynamics, control theory, neurobiology, and others (Kaushik & Sharma, Citation2020). However, see the reference (Driver, Citation2012) for additional applications of DDE.
Many researchers have made efforts to develop different numerical schemes for singularly perturbed differential equations (SPDEs) with a large negative shift parameter (Andargie Tiruneh et al., Citation2023; Hailu & Duressa, Citation2023a, Citation2023b; Hailu et al., Citation2022a). The authors in (Kumar & Rao, Citation2020; Pramod Chakravarthy et al., Citation2015, Citation2017) presented fitted operator numerical methods for solving SPDEs with non-smooth data and a large shift in the space variable, whereas in (Chakravarthy et al., Citation2018; Rai & Sharma, Citation2020; Selvi & Ramanujam, Citation2016) they applied fitted mesh methods.
In (Kumar & Kumari, Citation2020), the authors developed a uniform numerical scheme for singularly perturbed parabolic differential equations (SPPDEs) with a large time delay. The scheme consists of an implicit Euler scheme for the time derivative with a uniform mesh and an extension of the cubic uniform B-spline with a blending function of degree four in the spatial direction. The authors of (Daba & Duressa, Citation2021) presented a parameter-uniform numerical scheme for SPPDEs with small shift parameters in the reaction terms using an implicit Euler difference method in the temporal direction and the extended cubic B-spline method for the resulting system of differential equations in the spatial direction.
The authors (Bansal & Sharma, Citation2018) developed a parameter-uniform numerical scheme for solving a SPPDE of the reaction-diffusion type with a large negative spatial shift. In (Kaushik & Sharma, Citation2020), the authors studied SPPDE with non-smooth coefficients and a large spatial shift using an upwind difference method on a piece-wise uniform Shishkin mesh. Recently, Hailu and Duressa in (Hailu et al., Citation2022b) considered SPPDEs with a discontinuous coefficient, source term and a large negative spatial shift. A non-standard difference method is used in the space direction while the implicit Euler difference method is used in the temporal direction. The method is uniformly convergent with order one in both time and space directions. To the authors’ knowledge (Ayele et al., Citation2022; Daba & Duressa, Citation2022; Hailu et al., Citation2022b), are the only studies that have given uniformly fitted operator numerical method to tackle the problem at hand.
Consequently, motivated by the above works, this paper aims to present an accurate and uniformly convergent fitted operator numerical method, which does not require prior knowledge about the location and width of the boundary layer, to solve SPPDEs with discontinuous coefficients and a large negative shift in the space variable. The new mathematical contribution in this article is the application of the extended cubic B-spline method for the spatial direction on a uniform mesh, which provides a more accurate solution than some existing methods in the literature. The properties of the analytical solution, a brief description of the developed scheme, and the associated error analysis are provided in the following sections.
2. Continuous problem
Let ,
with a boundary
, where
, Misplaced & and
and consider the following SPPDE:
where , the coefficients
and
are sufficiently smooth, satisfying
,
, and
,
. Moreover,
where . The solution
satisfies
and
. When the delay term is small like
, for some δ smaller than the perturbation parameter ɛ, the use of Taylor’s series expansion for the term containing delay argument is valid (Tian, Citation2002). Thus, to approximate the term with delay parameter, we apply Taylor’s series expansion as:
and obtaining an asymptotically equivalent non-delayed equation. But this is not valid for the problem given in EquationEquation 1
(1)
(1) as it features a unit delay (large delay). Assume that the initial-boundary data
are smooth, bounded, and meet the following compatibility conditions:
Lemma 2.1.
Suppose that . If
,
and
, for all
, then
, for all
.
Proof.
For proof, see (Hailu et al., Citation2022b).
Lemma 2.2.
Suppose be solution of the problem in EquationEquation 1
(1)
(1) . Then
Proof.
For proof, see (Kaushik & Sharma, Citation2020).
Lemma 2.3.
Let be solution of the problem in EquationEquation 1
(1)
(1) . Then,
Proof.
The proof follows from the mean value theorem and Lemma 2.2.
3. Description of the method
3.1. Time semi-discretization
Approximating the time derivative in EquationEquation 1(1)
(1) using the implicit Euler scheme on a uniform mesh:
where M is the number of mesh elements in time direction and k is the step size, gives
where
where and
denoting the approximation of the exact solution
at the
time level.
The differential operator in EquationEquation 4(4)
(4) satisfies the semi-discrete minimum principle stated in the following Lemma:
Lemma 3.1.
Let be a smooth function satisfies
, for
and
,
. Then
,
.
Proof.
Choose so that
. Then
Assume that , then
because
, for
.
Case-i: If , then
Case-ii: If , then
In all cases, the assumption ,
is contradicted and thus
.
Therefore, ,
.
Lemma 3.2.
Suppose that be solution of the problem in EquationEquation 4
(4)
(4) . Then
Proof.
Defining the barrier functions as
where .
Now, ,
and
Case-i: For ,
Case-ii: For ,
Therefore, using Lemma 3.1, we obtain
Lemma 3.3.
Suppose that be solution of the problem in EquationEquation (4)
(4)
(4) . Then, the local error bound at the
time level is
Proof.
Refer (Daba & Duressa, Citation2021).
Lemma 3.4.
Let be solution of the problem in EquationEquation (4)
(4)
(4) , then the global error estimate is given by
Proof.
Using the estimate in Lemma 3.3, we get
Lemma 3.5.
The solution of the semidiscretized problem in EquationEquation (4)(4)
(4) satisfies the following bounds:
for .
Proof.
The proof is given in (Subburayan, Citation2016, Citation2018).
Note: The above lemma says that, the problem in EquationEquation (4)(4)
(4) has a weak boundary layer at s = 2 and strong interior layers at s = 1 (Subburayan, Citation2018).
3.2. Spatial discretization
Let be a uniform mesh points of the interval
with step size
. The extended form of cubic B-Spline basis
of degree four at points of
can be defined as:
where is a free parameter which is used to change the shape of the B-spline curve and r is the degree of extended cubic B-spline. For
cubic B-spline and extended cubic B-spline share the same properties (Sharifi & Rashidinia, Citation2019). Let
be the B-spline interpolating function for
at the nodal points. Now, we seek an approximation
to the solution
of the problem in EquationEquation (4)
(4)
(4) given by:
where is a parameter to be determined by requiring that
satisfies EquationEquation (4)
(4)
(4) at N +1 collocation points and boundary conditions. Table shows the values of
and the first two derivatives of
.
Table 1. Values of and its derivatives at the mesh points
Now, we can plug the value of and its derivatives into
and its derivatives, respectively, and then substitute the obtained results into EquationEquation (4)
(4)
(4) to get the following N +1 equations with N +3 unknowns:
where ,
.
Now, introduce a fitting factor into EquationEquation 10
(10)
(10) as:
Multiplying EquationEquation 11(11)
(11) by h, gives
where .
Following the same procedure as in (Debela & Duressa, Citation2020), we obtain the fitting factor:
In general, a variable fitting factor is given as:
Using EquationEquation (13)(13)
(13) into EquationEquation (11)
(11)
(11) , we obtain
where
Imposing the boundary conditions, gives
and
The equations in EquationEquation (14(14)
(14) –Equation16
(16)
(16) ) give an
linear system of equations.
where is an
-dimensional matrix whose entries are defined as follows:
and
It is clear that for sufficiently small values, matrix
is strictly diagonally dominant and thus non-singular. Hence, we can solve the system in EquationEquation (17)
(17)
(17) and then plug the values into EquationEquation (9)
(9)
(9) to get the required approximate solution.
4. Uniform convergence analysis
This section demonstrates the ɛ-uniform convergence of the proposed method in the spatial direction.
Lemma 4.1.
The extended cubic B-splines defined in EquationEquation (8)
(8)
(8) satisfy:
Proof.
Clearly,
Since the extended cubic B-spline is non-zero at only three nodal points, from Table , we have
From Table , for , we have
Now,
This completes the proof.
Lemma 4.2.
For a fixed number of mesh numbers N, and for , it holds
where ,
.
Proof.
On the discrete domain , for the interior grid points, we have
because and
.
Let , then we have
Now, using L’Hospital’s rule repeatedly, gives
This completes the proof.
Lemma 4.3.
Let be an extended cubic B-spline collocation approximation from the space of extended B-spline
to the solution of
. If
, then the parameter uniform error estimate satisfies the bound
where C is a positive constant independent of and N.
Proof.
Let Y(s) be the unique cubic spline interpolate from to the solution
of the EquationEquation (4)
(4)
(4) which is given by:
It follows from the estimate of (Hall, Citation1968) that the standard cubic spline interpolation error estimate holds, for ,
where γl are constants independent of h and ɛ.
Let for
with boundary conditions
and
. Then
By considering N is fixed and taking the limit for , we get:
Substituting EquationEquation (21)(21)
(21) into EquationEquation (20)
(20)
(20) and using the fact that
, gives
where C1 is independent of .
By using the bounds for the derivatives of the solution in Lemma 3.5 and applying the results of Lemma 4.2, for , we obtain
Thus, we have that
Now, gives a linear system
where
From EquationEquation (23)(23)
(23) , we get
For and sufficiently large N, the matrix Z is strictly diagonally dominant and thus non-singular. Hence, from the estimate in (Varah, Citation1975), we get
Combining the results in EquationEquation (24(24)
(24) -Equation26
(26)
(26) ), we obtain
Let , where
. Using EquationEquation (24)
(24)
(24) , we get
Using EquationEquation (25(25)
(25) ,Equation26
(26)
(26) ), we obtain
Using the boundary conditions we have the following estimates
Hence,
Therefore, from the above inequality, we obtain
Using EquationEquation 31(31)
(31) and Lemma 4.1, we obtain
Hence, from the triangular inequality and the results in EquationEquation (23)(23)
(23) and (Equation33
(33)
(33) ), we obtain
This completes the proof.
Theorem.
Let be the extended B-spline collocation approximation to the solution
of the problem in EquationEquation (4)
(4)
(4) at
time level of the fully discretized scheme after the temporal discretization. Then, the parameter-uniform error estimate of fully discrete scheme is given by
where C is a constant independent of N and .4.1
Proof.
From the triangular inequality, we have
5. Numerical results and discussion
To verify the theoretical findings produced by the suggested method, we looked at two model examples of singularly perturbed discontinuous coefficients in parabolic differential equations with a large negative shift in the space variable. The double mesh principle (Doolan et al., Citation1980) is used to determine the maximum point-wise error for the given examples because the exact solutions to these examples are unknown. The double-mesh principle is defined as follows:
where and
are the numerical solutions obtained on the mesh
and
respectively. The ɛ-uniform absolute error
is calculated by:
The formula for calculating the parameter-uniform rate of convergence is:
Example 5.1.
Consider the following singularly perturbed problem (Ayele et al., Citation2022):
where
Example 5.2.
Consider the following singularly perturbed problem (Kaushik & Sharma, Citation2020):
where
Example 5.3.
Consider the following singularly perturbed problem (Daba & Duressa, Citation2022):
where
The values of maximum point-wise absolute errors , parameter-uniform errors
, and parameter-uniform rate of convergence
obtained by the suggested scheme for Examples 5.1, 5.2 and 5.3 are given in Tables (,,), respectively. The tables demonstrate that for each mesh interval N, the maximum point-wise absolute error becomes stable and uniform as ɛ gets closer to zero. This proves that the convergence of the suggested method is irrespective of the choice of perturbation parameter. Table also includes a comparison of numerical results obtained by the proposed scheme and results from (Ayele et al., Citation2022).
Table 2. Values of ,
and
for example 5.1 when δ = 0.99 and N = M
Table 3. Values of ,
and
for example 5.2 when δ = 0.99 and N = M
Table 4. Values of ,
and
for example 5.3 when δ = 0.99 and N = M
Table 5. Comparison of ɛ-uniform values using the proposed method for example 5.1 when δ = 0.99 and N = M
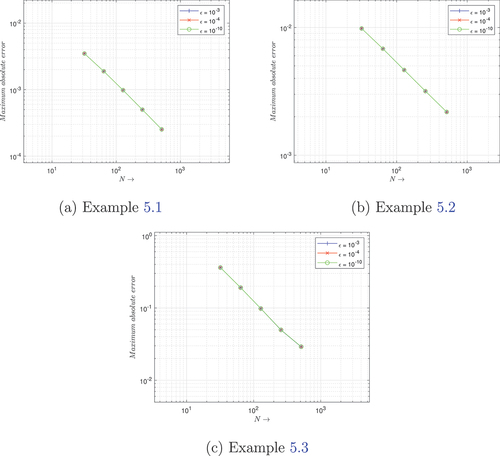
Solution profiles for Examples 5.1, 5.2 and 5.3 are shown in Figures , respectively. In Figure , we observe that the behavior of the numerical solution, and for very small values of ɛ, the problem under consideration exhibits an interior layer at s = 1. Figure also shows the log-log plot of the maximum point-wise absolute errors. It confirms the theoretical order of convergence of the suggested numerical scheme. According to the negative slope, the maximum point-wise absolute error decreases with increasing mesh point count. The convergence is parameter-uniform because this behavior is independent of the magnitude of the perturbation parameter applied. One of the primary findings that this paper claims to demonstrate is this.
Figure 1. Numerical solutions of example 5.1 for δ = 0.99 when .
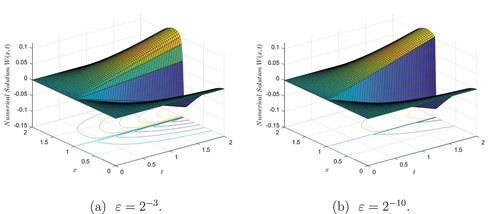
Figure 2. Numerical solutions of example 5.2 for δ = 0.99 when .
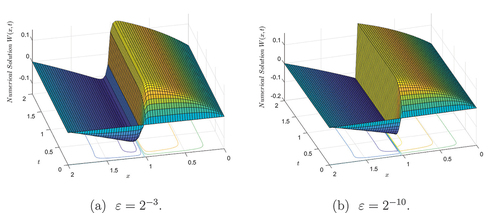
Figure 3. Numerical solutions of example 5.3 for δ = 0.99 when .
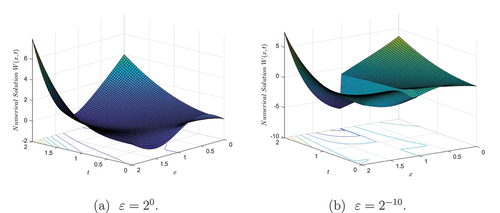
Figure 4. Line graphs at t = 2 when δ = 0.99 and .
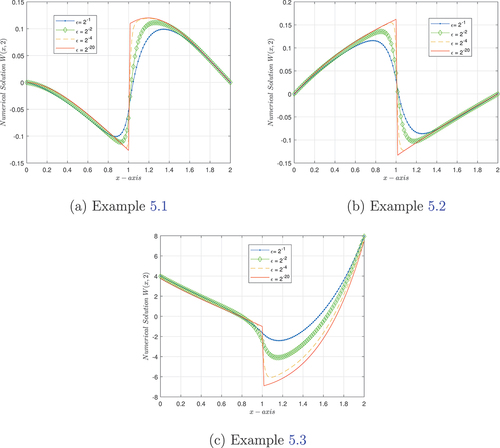
Figure 5. The log-log plot of the maximum absolute errors.
6. Conclusions
A class of SPPDEs with turning point behavior across discontinuities and weak boundary layers is numerically solved in this article. The implicit Euler difference method for the temporal direction and the extended cubic B-spline scheme, containing a free parameter δ for the spatial direction, are used to formulate a parameter-uniform numerical method. The convergence analysis of the method revealed that it is of order , preserving a parameter-uniform convergence. To demonstrate the viability of the suggested method, two examples are taken into consideration for numerical experimentation with different values of
and number of mesh points. The computational findings are presented in tables and figures. The method improves on the results of certain existing numerical methods in the literature.
Higher-dimensional singularly perturbed parabolic problems can readily be solved using the proposed approach. In subsequent work, we will attempt to broaden the application of the method to semi-linear and higher-dimensional SPPDEs with non-smooth data.
Acknowledgements
The authors would like to express their gratitude to the anonymous referees for their helpful suggestions that helped to improve the quality of this paper.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Funding
This research received no specific funding from public, private, or non-profit funding agencies.
Additional information
Notes on contributors
Wondimagegnehu Simon Hailu
Wondimagegnehu Simon Hailu is a PhD candidate. He is currently employed as a lecturer of mathematics at Dilla University in Ethiopia. His research interest spans the areas of the development of the numerical methods for singularly perturbed ordinary and partial differential equations. He has more than 4 research articles published in various national and international journals.
Gemechis File Duressa
Gemechis File Duressa holds an M.Sc. from Addis Ababa University in Ethiopia and a Ph.D. from the National Institute of Technology in Warangal, India. He is currently employed as a full professor of mathematics and Director of the School of Graduate Studies at Jimma University in Ethiopia. He has over 184 research papers published in various national and international journals. He serves as a referee for several prestigious international journals. He is the research supervisor for Wondimagegnehu Simon Hailu.
References
- Andargie Tiruneh, A., Adamu Derese, G., Amsalu Ayele, M., & Cardone, A. (2023). Singularly perturbed reaction diffusion problem with large spatial delay via non-standard fitted operator method. Research in Mathematics, 10(1), 2171698. https://doi.org/10.1080/27684830.2023.2171698
- Ayele, M. A., Tiruneh, A. A., Derese, G. A., & Araci, S. (2022). Uniformly convergent scheme for singularly perturbed space delay parabolic differential equation with discontinuous convection coefficient and source term. Journal of Mathematics, 2022, 1–15. https://doi.org/10.1155/2022/1874741
- Bansal, K., & Sharma, K. K. (2018). Parameter-robust numerical scheme for time-dependent singularly perturbed reaction–diffusion problem with large delay. Numerical Functional Analysis and Optimization, 39(2), 127–154. https://doi.org/10.1080/01630563.2016.1277742
- Chakravarthy, P. P., Gupta, T., & Rao, N. R. (2018). A numerical scheme for singularly perturbed delay differential equations of convection-diffusion type on an adaptive grid. Mathematical Modelling and Analysis, 23(4), 686–698. https://doi.org/10.3846/mma.2018.041
- Daba, I. T., & Duressa, G. F. (2021). Extended cubic b-spline collocation method for singularly perturbed parabolic differential-difference equation arising in computational neuroscience. International Journal for Numerical Methods in Biomedical Engineering, 37(2), e3418. https://doi.org/10.1002/cnm.3418
- Daba, I. T., & Duressa, G. F. (2022). Computational method for singularly perturbed parabolic differential equations with discontinuous coefficients and large delay. Heliyon, 8(9), e10742. https://doi.org/10.1016/j.heliyon.2022.e10742
- Debela, H. G., & Duressa, G. F. (2020). Accelerated fitted operator finite difference method for singularly perturbed delay differential equations with non-local boundary condition. Journal of the Egyptian Mathematical Society, 28(1), 1–16. https://doi.org/10.1186/s42787-020-00076-6
- Doolan, E. P., Miller, J. J., & Schilders, W. H. (1980). Uniform numerical methods for problems with initial and boundary layers. Boole Press.
- Driver, R. D. (2012). Ordinary and delay differential equations (Vol. 20). Springer Science & Business Media.
- Hailu, W. S., & Duressa, G. F. (2023a). Accelerated parameter-uniform numerical method for singularly perturbed parabolic convection-diffusion problems with a large negative shift and integral boundary condition. Results in Applied Mathematics, 18, 100364. https://doi.org/10.1016/j.rinam.2023.100364
- Hailu, W. S., & Duressa, G. F. (2023b). Uniformly convergent numerical scheme for solving singularly perturbed parabolic convection-diffusion equations with integral boundary condition. Differential Equations and Dynamical Systems, 1–27. https://doi.org/10.1007/s12591-023-00645-y
- Hailu, W. S., Duressa, G. F., & Liu, L. (2022a). Parameter-uniform cubic spline method for singularly perturbed parabolic differential equation with large negative shift and integral boundary condition. Research in Mathematics, 9(1), 2151080. https://doi.org/10.1080/27684830.2022.2151080
- Hailu, W. S., Duressa, G. F., & Liu, L. (2022b). Uniformly convergent numerical method for singularly perturbed parabolic differential equations with non-smooth data and large negative shift. Research in Mathematics, 9(1), 2119677. https://doi.org/10.1080/27684830.2022.2119677
- Hall, C. (1968). On error bounds for spline interpolation. Journal of Approximation Theory, 1(2), 209–218. https://doi.org/10.1016/0021-9045(68)90025-7
- Kaushik, A., & Sharma, N. (2020). An adaptive difference scheme for parabolic delay differential equation with discontinuous coefficients and interior layers. Journal of Difference Equations and Applications, 26(11–12), 1450–1470. https://doi.org/10.1080/10236198.2020.1843645
- Kumar, D., & Kumari, P. (2020). A parameter-uniform scheme for singularly perturbed partial differential equations with a time lag. Numerical Methods for Partial Differential Equations, 36(4), 868–886. https://doi.org/10.1002/num.22455
- Kumar, N. S., & Rao, R. N. (2020). A second order stabilized central difference method for singularly perturbed differential equations with a large negative shift. Differential Equations and Dynamical Systems, 31(4), 1–18. https://doi.org/10.1007/s12591-020-00532-w
- Pramod Chakravarthy, P., Dinesh Kumar, S., & Nageshwar Rao, R. (2017). Numerical solution of second order singularly perturbed delay differential equations via cubic spline in tension. International Journal of Applied and Computational Mathematics, 3(3), 1703–1717. https://doi.org/10.1007/s40819-016-0204-5
- Pramod Chakravarthy, P., Dinesh Kumar, S., Nageshwar Rao, R., & Ghate, D. P. (2015). A fitted numerical scheme for second order singularly perturbed delay differential equations via cubic spline in compression. Advances in Difference Equations, 2015(1), 1–14. https://doi.org/10.1186/s13662-015-0637-x
- Rai, P., & Sharma, K. K. (2020). Numerical approximation for a class of singularly perturbed delay differential equations with boundary and interior layer (s). Numerical Algorithms, 85(1), 305–328. https://doi.org/10.1007/s11075-019-00815-6
- Selvi, P. A., & Ramanujam, N. (2016). An iterative numerical method for singularly perturbed reaction-diffusion equations with negative shift. Journal of Computational and Applied Mathematics, 296, 10–23. https://doi.org/10.1016/j.cam.2015.09.003
- Sharifi, S., & Rashidinia, J. (2019). Collocation method for convection-reaction-diffusion equation. Journal of King Saud University-Science, 31(4), 1115–1121. https://doi.org/10.1016/j.jksus.2018.10.004
- Subburayan, V. (2016). A parameter uniform numerical method for singularly perturbed delay problems with discontinuous convection coefficient. Arab Journal of Mathematical Sciences, 22(2), 191–206. https://doi.org/10.1016/j.ajmsc.2015.07.001
- Subburayan, V. (2018). An hybrid initial value method for singularly perturbed delay differential equations with interior layers and weak boundary layer. Ain Shams Engineering Journal, 9(4), 727–733. https://doi.org/10.1016/j.asej.2016.03.018
- Tian, H. (2002). The exponential asymptotic stability of singularly perturbed delay differential equations with a bounded lag. Journal of Mathematical Analysis and Applications, 270(1), 143–149. https://doi.org/10.1016/S0022-247X(02)00056-2
- Varah, J. M. (1975). A lower bound for the smallest singular value of a matrix. Linear Algebra and Its Applications, 11(1), 3–5. https://doi.org/10.1016/0024-3795(75)90112-3