

Abstract
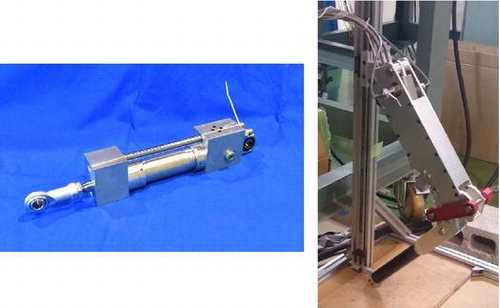
One of the most important missions for robots is to operate in severe environments, and these situations require robots to have ‘toughness’ which can overcome large shocks, degraded communication quality, unexpected condition, and other critical accidents. Although there are many kinds of approaches to realize tough robotic systems, developing a tough actuators is one of the key technologies for them. We focus on hydraulic actuators and attempt to develop a tough robotic actuator with greater toughness than the electromagnetic actuators used in conventional robotic systems. In general, hydraulic actuators have enough toughness for severe environments, but their controllability and lightness are insufficient for robot systems. Herein, we propose novel hydraulic actuators that realizes lightweight with a multidirectional-forging magnesium alloy and have high controllability by low friction pistons. Prototypes were developed to examine the fundamental characteristics of the actuators and compare the two approaches for the low-friction pistons: one is based on a packing mechanism using an elastic restoring pressure, and the other utilizes a fluid-bearing technology. After basic experiments, the prototype was applied to a robotic leg to verify their potential in actual robotic systems. The robotic leg successfully jumped 260 mm in height with 21 MPa.
Notes
No potential conflict of interest was reported by the authors.