

Abstract
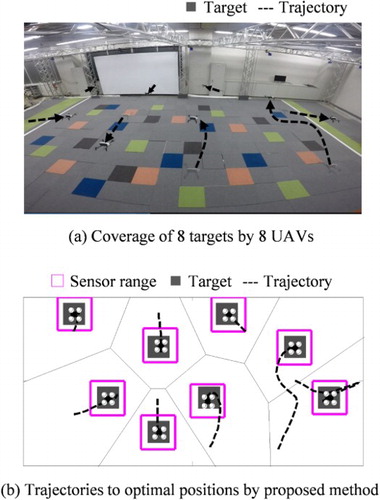
Coverage control has been widely used for constructing mobile sensor network such as for environmental monitoring, and one of the most commonly used methods is the Lloyd algorithm based on Voronoi partitions. However, when this method is used, the result sometimes converges to a local optimum. To overcome this problem, game theoretic coverage control has been proposed and found to be capable of stochastically deriving the optimal deployment. From a practical point of view, however, it is necessary to make the result converge to the global optimum deterministically. In this paper, we propose a global optimal coverage control along with collision avoidance in continuous space that ensures multiple sensors can deterministically and smoothly move to the global optimal deployment. This approach consists of a cut-in algorithm based on neighborhood importance of measurement and a modified potential method for collision avoidance. The effectiveness of the proposed algorithm has been confirmed through numerous simulations and some experiments using multiple aerial robots.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
K. Shibata http://orcid.org/0000-0003-0753-7663
Additional information
Notes on contributors
K. Shibata
Kazuki Shibata received the M.E. degree in Department of Aeronautics and Astronautics from University of Tokyo, Tokyo, Japan, in 2014. Since 2014, he has been a researcher, with Toyota Central R&D Labs., Inc., Aichi, Japan. His research interests are in modeling, control theory and system design of vehicle and robotic systems. He is a member of RSJ, SICE and JSASS.
T. Miyano
Tatsuya Miyano received the B.Eng. and M.Eng. degrees from Tokyo Institute of Technology in 2007 and 2009, respectively. He is currently a researcher with Toyota Central R&D Labs., Inc., and a Ph.D. student at Department of Systems and Control Engineering, Tokyo Institute of Technology. His research interests include passivity-based distributed optimization and robotic networks.
T. Jimbo
Tomohiko Jimbo received the B.E. degree in Electronic Mechanical Engineering, the M.E. degree in Micro system Engineering, and the D.E. degree in Mechanical Engineering Science, all from Nagoya University, Nagoya, Japan, in 2000, 2002 and 2010, respectively. Since 2002, he has been a researcher, with Toyota Central R&D Labs., Inc., Aichi, Japan. His research interests are in modeling, control theory, signal processing, and system design of automotive engine, power train, vehicle and robotic systems. He is a member of JSAE and SICE.