

Abstract
Locomotion in unstructured and irregular environments is an enduring challenge in robotics. This is particularly true at the small scale, where relative obstacle size increases, often to the point that a robot is required to climb and transition both over obstacles and between locomotion modes. In this paper, we explore the efficacy of different design features, using ‘morphological intelligence’, for mobile robots operating in rugged terrain, focusing on the use of active and passive tails and changes in mass distribution, as well as elastic suspensions of mass. We develop an initial prototype whegged robot with a compliant neck and test its obstacle traversal performance in rapid locomotion with varying its mass distribution. Then we examine a second iteration of the prototype with a flexible tail to explore the effect of the tail and mass distribution in ascending a slope and traversing obstacles. Based on observations from these tests, we develop a new platform with increased performance and a fin ray wheel-leg design and present experiments on traversing large obstacles, which are larger than the robot's body, of this platform with tails of varying compliance. This biorobotic platform can assist with generating and testing hypotheses in robotics-inspired biomechanics of animal locomotion.
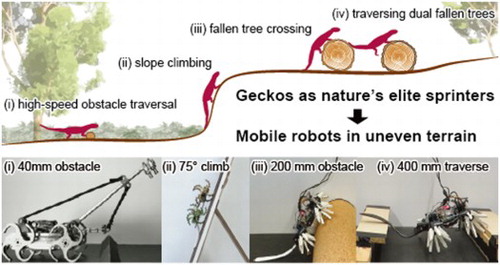
GRAPHICAL ABSTRACT
Acknowledgements
We thank the Max Planck Society and the Cyber Valley Initiative for grants to Ardian Jusufi (CyVy-RF-2018-09). Also appreciated is the Alexander von Humboldt Society's postdoctoral financial support of Robert Siddall. We thank the Central Service Station for Robotics and Mechatronics at the Max Planck Institute for Intelligent Systems (MPI-IS) for their continuous assistance. The authors would like to acknowledge the Fabrication Laboratory Bonevet managing director Arber Lleshi as well as overall director Vllaznim Xhiha. We thank Fabian Schwab of the Lab for Locomotion in Biorobotic and Somatic Systems for valuable insights.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Correction Statement
This article has been republished with minor changes. These changes do not impact the academic content of the article.
Notes
1 The Simulink model is available for download at https://github.com/robjds/ElasticHead
Additional information
Funding
Notes on contributors
Robert Siddall
Rob Siddall is on a Postdoctoral Humboldt Fellowship at the Locomotion Biorobotic & Somatic Systems group at the Max Planck Institute for Intelligent Systems, subsequently a lecturer in robotics at the University of Surrey. He received his Master's degree in Aerospace Engineering from the University of Cambridge and his PhD in Aeronautics from Imperial College London. He is interested in multimodal locomotion, with an emphasis on hybrid forms of flight.
Toshihiko Fukushima
Toshihiko Fukushima is a research engineer in the lab for Locomotion in Biorobotic & Somatic Systems at the Max Planck Institute for Intelligent Systems. He received his Bacholar's degree in Engineering and Master's degree in Interdisciplinary Information Studies from Toyota Technological Institute in 2012 and from The University of Tokyo in 2014 respectively. After that, he has worked as an automotive engineer at Toyota Motor Corporation, Toyota Motorsport GmbH and NTN Wälzlager (Europa) GmbH. His current fields of interest are bio-inspired robotics, dynamic locomotion and soft robotics.
Drilon Bardhi
Drilon Bardhi is currently a student of the Faculty of Medicine, branch of general medicine and integrated studies at the University of Prishtina ‘Hasan Prishtina’. His interests include the use of robotic systems for minimally invasive interventions, the development of new prostheses, and life support systems.
Buna Perteshoni
Buna Perteshoni is currently a student at Des Moines Area Community College, in the Tech and Industry department. Her interests are focused on 3D design of high precision dies and creating a sustainable plant with a economic impact in her country.
Albulena Morina
Albulena Morina is currently a student of the Faculty of Mathematics and Natural Sciences, branch of physics at the University of Prishtina ‘Hasan Prishtina’. Her interests include the use of robots with repetitive movements in biological laboratories, and the physics behind robotics locomotion.
Era Hasimja
Era Hasimja is a student of University of Business and Technology, branch of computer science and engineering at the UBT - Prishtine. Her interests include the use of computers to solve real-world problems, especially focused on controlling robots performance by developing complex and flexible models of them.
Yll Dujaka
Yll Dujaka is a student at the Faculty of Electronic and Computer Engineering, branch of electronic engineering at the University of Prishtina ‘Hasan Prishtina’. His interest includes the use of technology in simplifying everyday problems by configuring robot designs.
Gezim Haziri
Gezim Haziri is a student at the Faculty of Electronic and Computer Engineering, branch of Electronic Engineering at the University of Prishtina ‘Hasan Prishtina’. His interest includes making fun and practicable projects that make everyday life tasks easier and designing electronic PCBs.
Lina Martin
Lina Martin received her B.Sc. in Biomimetics from the Westphalian University of Applied Sciences in 2020 and worked as a researcher assistant at the Locomotion Biorobotic & Somatic Systems group at the Max Planck Institute for Intelligent Systems. She is interested in practical biological field research.
Hritwick Banerjee
Hritwick Banerjee is working as a Jr. Scientist in the Locomotion in Biorobotic & Somatic Systems Group at the Max Planck Institute for Intelligent Systems (MPI-IS). In the past, he was working as a Sr. Research Engineer at the Dept. of Biomedical Engineering, National University of Singapore (NUS) (2016–19). Before this, he also worked as a Research Engineer at the NUS (2015–16), Indian Institute of Science (IISc), Bangalore, India (2014–15). He graduated with a Master's Degree in Electrical Engineering from the Indian Institute of Technology (IIT), Gandhinagar (2014) in collaboration with the IIT Kharagpur and the University of Oxford (Institute of Biomedical Engineering), UK.
Ardian Jusufi
Ardian Jusufi is a Max Planck Independent Group Leader, and head of the lab for Locomotion in Biorobotic and Somatic Systems (at the Max Planck Institute for Intelligent Systems), which is also a Cyber Valley research group. Dr. Jusufi is also Associate Faculty at the ETH Center for Learning Systems (CLS). Ardian's formal undergraduate and graduate university training was concluded at the University of California at Berkeley USA. He earned his PhD at the U.C. Berkeley CiBER Center. He was a Postdoctoral Researcher Associate at Queens' and Darwin Colleges, at the University of Cambridge. Ardian was a postdoctoral researcher at Harvard University, under supervision of Prof. Robert Wood of the Harvard Microrobotics Lab at the School of Engineering and Applied Sciences at Harvard University, and the Wyss Institute for Biologically-Inspired Engineering. Ardian was a Lectuer at the Center for Autonomous Systems, Facultuy of Engineering and Information Technology at Sydney University of Technology.