

Abstract
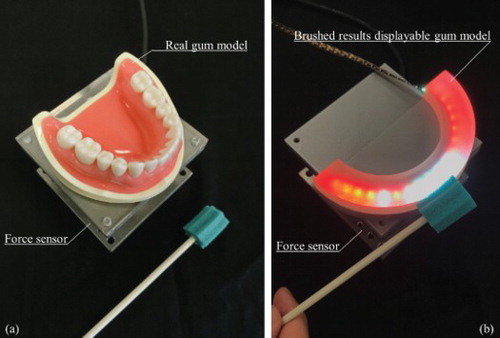
In general, oral care training is often practiced in pairs. However, this method is not recommended in the current situation with the ongoing COVID-19 pandemic, because it requires face-to-face and short-distance work. To address this problem, we propose a measurable oral care simulator, where a single force sensor is installed at the bottom of the gum model. We developed a measurement algorithm for estimating the force and contact points of the brush from the force and moment measured by the force sensor. The proposed simulator can be used to practice oral care by oneself without any risk of infection. In addition, the efficiency of practice is expected to improve, because the proposed simulator can be used to objectively evaluate oral care skills. Furthermore, the gum model can be easily adjusted to practice various cases of oral care. Experiments were performed to validate the proposed oral care simulator with two gum models, a real gum model and a displayable gum model that shows the brushing results. The results confirmed that the proposed oral care simulator and algorithm accurately estimate the contact points as well as the normal and tangential forces of the brush with only one force sensor.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Takahiro Matsuno
Takahiro Matsuno received the PhD degree in mechanical engineering from Ritsumeikan University, Kusatsu, Shiga, Japan in 2017. He is currently working as an assistant professor in the Department of Robotics at Ritsumeikan University. His current research interests include development of oral care simulator, design of soft sensor and analysis of soft locomotion robot. He is a member of the IEEE, RSJ, JSME, JSSE, JTE and JNSE.
Takehiro Yabushita
Takehiro Yabushita received the BS degree in mechanical engineering from Ritsumeikan University, Shiga, Japan in 2020. His research was development of oral care simulator. He is currently working at city government of Osaka.
Atsushi Mitani
Atsushi Mitani received the PhD degree in mechanical engineering from Ritsumeikan University, Kusatsu, Shiga, Japan in 2003. He is currently working as a professor in the Course of Communication Design for Human Life at Sapporo City University. His current research interests include the development of oral care simulator, mealtime assistant simulator, recreation support system for demented patient, and horseback riding therapy support cushion. He is a member of the IEEE, RSJ, JSME, SICE, JSPE and JNSE.
Shinichi Hirai
Shinichi Hirai received his BS, MS and Doctoral degrees in Applied Mathematics and Physics from Kyoto University, in 1985, 1987 and 1991, respectively. He is currently a Professor in the Department of Robotics at Ritsumeikan University. He was a Visiting Researcher at Massachusetts Institute of Technology, in 1989, and was an Assistant Professor at Osaka University, from 1990 to 1996. His current research interests are soft robotics, soft sensors, and soft object manipulation. He is a member of the IEEE, RSJ, JSME, SICE and JNSE.