

Abstract
In the era of social distancing, humans tend to interact more with digital edges/devices and robotic avatar. Users mostly interact with cyber-physical systems through audiovisual devices, while tangible interfaces are limited to touch panels. Touch perception not only brings sense of physical contact, texture; but also conveys the intention and emotion of users. Here, we introduce a novel soft tangible device, called IoTouch, as a combination of soft robotics and deep learning, that can act as both robotic skin or haptic sensing interface. The technique aims to implementation of touch sensing with a vision-based approach. We showcase on barrel shape (ellipsoid with two flattened ends) of the IoTouch, where a dataset of tactile images was collected through an autonomous process, in order to train a network for recognition of physical contact states (contact location, contact depth). A Finite Element Method model of the barrel skin was also setup for data acquisition of skin's deformation. The proposed method can detect multiple contacts simultaneously on the entire area of the barrel skin. Obtained result promises a platform for creation of robotic avatars that can sense diverse states of physical touch, through which the users' experience and communication of haptics can be enhanced.
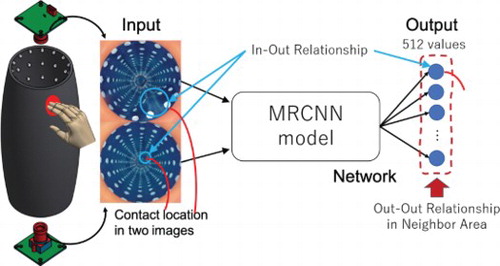
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Van Anh Ho
Van Anh Ho received the Ph.D. degree in robotics from Ritsumeikan Unviersity, Kyoto, Japan, in 2012. He completed the JSPS Postdoctoral Fellowship in 2013 before joining Advanced Research Center Mitsubishi Electric Corp., Japan. From 2015 to 2017, he worked as Assistant Professor with Ryukoku University, where he led a laboratory on soft haptics. From 2017, he joined the Japan Advanced Institute of Science and Technology for setting up a laboratory on soft robotics. His current research interests are soft robotics, soft haptic interaction, tactile sensing, grasping and manipulation, bio-inspired robots. Prof. Ho was the recipient of 2019 IEEE Nagoya Chapter Young Researcher Award, Best Paper Finalists at IEEE SII (2016) and IEEE RoboSoft (2020). He is member of The Robotics Society of Japan (RSJ), IEEE.
Shotaro Nakayama
Shotaro Nakayama received the Master degree in 2021 at Japan Advanced Science and Technology. His research interests are soft robotics, machine learning, network.