

Abstract
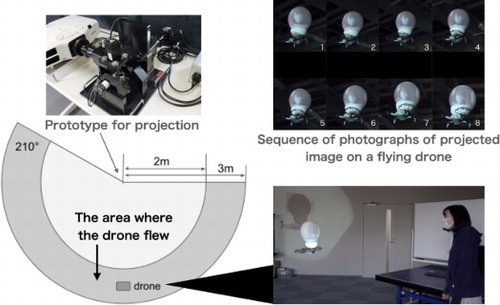
In this study, we propose a method for dynamic projection mapping on a target moving at high speed in a wide area around the projection equipment, using a high-speed gaze control system called Saccard Mirror 3. The prototype system successfully projected images over a wide angular range using a rotating mirror and kept projecting images on a flying drone while allowing the drone to move over a wide area. We also demonstrated an avatar robot using a drone based on the proposed system in combination with a teleconference system. This application is important for improving the quality of new normal (QoNN) in the sense that it will enable remote work for customer service in a variety of stores in the future.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Notes
Additional information
Funding
Notes on contributors
Shino Higuchi
Shino Higuchi graduated from School of Science and Technology, Gunma University, Japan, in 2020. She is currently enrolled in the Graduate School of Science and Technology, Gunma University(2020-).
Hiromasa Oku
Hiromasa Oku received the Dr Eng. degrees in Mathematical Engineering and Information Physics from the University of Tokyo, Japan, in 2003. He was a Researcher in PRESTO, Japan Science and Technology Agency from 2003 to 2005. He was a Research Associate (2005–2007), Assistant Professor (2007–2011), Lecturer/Assistant Professor (2011–2014) in the University of Tokyo, and an Associate Professor in Gunma University(2014–2020). Now he is a Professor in Faculty of Informatics, Gunma University. His research interests include high-speed image processing, high-speed optical device, and dynamic image control.