

Abstract
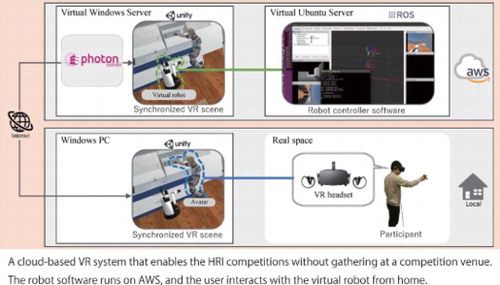
The COVID-19 pandemic has made it difficult to conduct research involving human-robot interactions (HRIs). As a result, many robot competitions have been canceled in the past year. To address this problem, we propose a cloud-based VR platform for the crowdsourcing of embodied cognition with multiple human users and a virtual robot. The feasibility of the platform is evaluated from the latency of the interactive events and the motions of avatars, based on the number of users logging in to the VR scene and the distance between the local and server environments. We also discuss the feasibility of our system when dealing with large-scale datasets in embodied HRI experiments.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Notes
Additional information
Funding
Notes on contributors
Tetsunari Inamura
Tetsunari Inamura received the B.E., M.E., and Ph.D. degrees from the University of Tokyo, Tokyo, Japan, in 1995, 1997, and 2000, respectively. He was a Researcher of the CREST Program, Japanese Science and Technology Cooperation, from 2000 to 2003, and then joined the Department of Mechano-Informatics, School of Information Science and Technology, University of Tokyo, as a Lecturer, from 2003 to 2006. He is currently an Associate Professor with the Principles of Informatics Research Division,National Institute of Informatics, and an Associate Professor with the Department of Informatics, School of Multidisciplinary Sciences, The Graduate University for Advanced Studies (SOKENDAI), Tokyo, Japan. His current research interests include imitation learning, symbol emergence on social robots, and the development of interactive robots through virtual reality.
Yoshiaki Mizuchi
Yoshiaki Mizuchi received the B.S., M.S., and Ph.D. degrees from Soka University, Tokyo, Japan, in 2010, 2012, and 2016, respectively. He was a Project Researcher at the Principles of Informatics Research Division, National Institute of Informatics, Tokyo, Japan, from 2016 to 2021. He is currently an Assistant Professor at the College of Engineering, Tamagawa University, Tokyo, Japan. His current research interests include human-robot interaction in daily life environments and the development of service robots utilizing immersive virtual reality techniques.
Hiroki Yamada
Hiroki Yamada received the B.E. and M.E. degrees from The University of Electro-Communications in 2002 and 2004 respectively. He is currently a Project Researcher with the Principles of Informatics Research Division, National Institute of Informatics, Tokyo, Japan. His current research interests include virtual reality techniques for human-robot interaction and development of robot competition platform based on virtual reality.