

Abstract
The collective movement of animals has long been a source of inspiration for multi-agent swarm robotics. One of the fundamental goals for swarm robotics study is to understand how effective and robust collective behaviors can emerge from simple interaction principles. When animal or robot collectives are in high-density configurations the ability for visual or auditory sensing is diminished and the opportunities for interacting through mechanical contact are enhanced. In this paper, we study how robots that move through lateral body undulation in close proximity are capable of synchronizing their oscillatory gaits through contact interactions between adjacent robots. Critically, gait phase synchronization occurs without the requirement for robot–robot communication, and instead can be engineered as an emergent property of the robot control system. We present a proprioceptive feedback control system that generates collective gait phase synchronization of undulatory robots in experiment and simulation. We first validate this control system using a simple one-dimensional toy model to demonstrate how proprioceptive feedback governs phase synchronization. Simulations and experiments with undulatory three-link robots further demonstrate how phase synchronization can be controlled. Lastly, we demonstrate that robot pairs moving in a confined tunnel can synchronize their movements which leads to faster group locomotion through confined spaces.
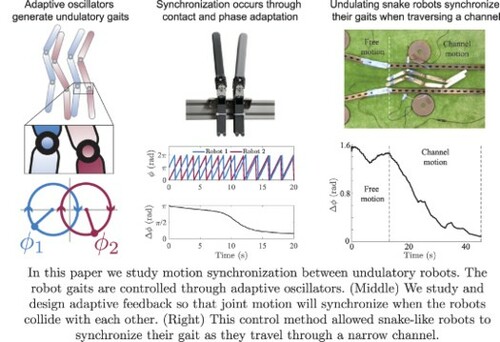
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Zhuonan Hao
Zhuonan Hao received his B.S. degree in Vehicle Engineering from Beijing Institute of Technology in China, and M.S. degree in Mechanical Engineering from the University of California, San Diego. His Master's thesis was entitled Design Principles for Locomotion Synchronization in Undulatory Robot Groups. He is currently a PhD student in the Structure–Computer Interaction lab at the University of California, Los Angeles. His interests and research are in the areas of bio-inspired soft robotics.
Wei Zhou
Wei Zhou received his B.S. degree in Mechanical Engineering and Automation from Beihang University and Master's degree in Mechanical Engineering from the University of Michigan Ann Arbor. He is currently a PhD student in the Gravish Lab in the Mechanical & Aerospace Engineering department at the University of California, San Diego. His interests and research are in the areas of control & dynamics and robotics.
Nick Gravish
Nick Gravish received his B.S. degree in Physics from the University of California, Santa Barbara in 2005. He received his PhD from the Georgia Technology Institute in the Department of Physics in 2013. From 2013 to 2016, he was a post-doc in the Harvard microrobotics lab and the Combes insect flight lab where he developed bioinspired robots and methods for insect biomechanics study. He is currently an assistant professor in the Mechanical & Aerospace Engineering department at the University of California, San Diego, where he joined in 2016. In 2013, Dr. Gravish was selected as a McDonnell fellow in Complex Systems Science and in 2020 he received a CAREER award from the National Science Foundation. His research interests lie the areas of Animal Biomechanics, Robotics Inspired Biology, and Robophysics study of nonlinear dynamical systems. These areas intersect in the study of robot and animal locomotion which are studied in his lab at UC San Diego.