

Abstract
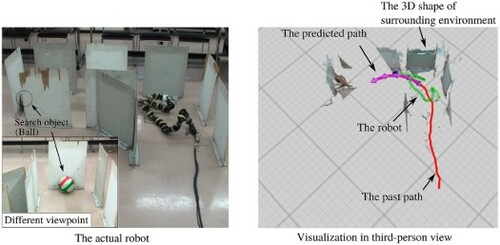
This study presents a visualization system in a third-person view for the teleoperation of a snake-like robot. The proposed system visualizes the robot, its surroundings, past path, and predicted path. The visualization is achieved by drawing a robot at self-position and the sensor information, such as a point cloud around the robot, in a virtual 3D space. Therefore, localization plays a key role in visualization. We propose a new localization method that relies only on the information from joint angles and an IMU. We evaluated the proposed method by comparing it with other methods on a flat ground and on a combination of a plane and a slope with a rough surface. The results demonstrated the effectiveness of the proposed method in both cases. Then, we examined the visualization system in room environments. The results showed that the proposed system successfully visualized the robot and its surroundings. We also confirmed the effectiveness of the visual aid by the predicted path.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Taro Abe
Taro Abe Taro Abe received the B. E. from Hachinohe National College of Technology, Department of Electrical and Mechanical Systems Engineering, in 2016. He received the M. E. from the Graduate School of Systems and Information Engineering, University of Tsukuba, in 2019. He is currently a Ph.D. candidate in the Graduate School of Systems and Information Engineering, University of Tsukuba. His research interests include the development and localization of snake-like robots.
Hisashi Date
Hisashi Date Hisashi Date received the M.E. and Ph.D. degrees from Tokyo Institute of Technology in 2000 and 2003, respectively. From 2003 to 2013, he was Research Associate in the Department of Computer Science, National Defense Academy. From 2013 to 2015, he was Lecturer in the same department. From 2005 to 2006, he was a visiting associate at the Department of Mechanical Engineering, California Institute of Technology. Since 2015, he has been Associate Professor at the Faculty of Engineering, Information and Systems, University of Tsukuba. His current research interests are in nonlinear model predictive control and autonomous robots.