

ABSTRACT
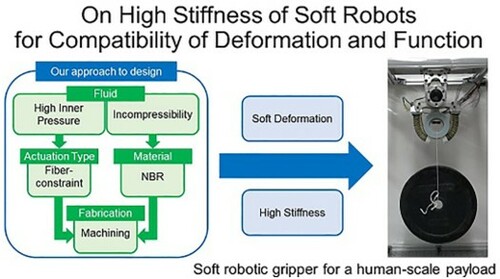
This study investigates the compatibility between the soft deformation and high stiffness through the development of a soft robotic gripper for a human-scale payload. Softness is important for robotic systems that physically interact with the environments, especially for adaptive grasping or manipulation of unknown objects. Pursuing only softness would not achieve them either, and creating a certain stiffness is also an essential function in many human-scale applications. Soft robotics is unique in that it employs soft materials for the structure, and will find a lot more applications if it gains the human-scale specifications of force or the equivalent stiffness. We discuss the compatibility of the soft deformation and high stiffness based on a numerical analysis, and then present the design of a soft robotic gripper actuated by high oil-pressure, reporting its experimental validations.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Notes
1 We examined the oil resistance of the rubber-like resin by immersing a test piece of about 2 g in oil for seven days. We confirmed that there was no change in mass in units of 0.1 g, in addition to the information released by the manufacturer companies.
2 The maximum tensile strength of rubber-like resin TangoGray (FLX950) is 3–5 MPa [Citation19] while those of FKM, NBR, and ACM are 21, 28, and 17 MPa, respectively [Citation20]).
Additional information
Funding
Notes on contributors
Keisuke Hagiwara
Keisuke Hagiwara received his BEng and MEng degrees in Mechano-Informatics from the University of Tokyo in 2019 and 2021, respectively. His research interests include soft robotics, hydraulic actuators, and computer vision. He is a member of JSME.
Ko Yamamoto
Ko Yamamoto received the PhD degree in mechano-informatics from the University of Tokyo, Tokyo, Japan, in 2009. He is an Associate Professor with the Department of Mechano-informatics, University of Tokyo. He was a Postdoctoral Research Fellow with the Tokyo Institute of Technology in 2009–2012, and an Assistant Professor with Nagoya University in 2012–2014. He joined the University of Tokyo as an Assistant Professor in 2014, and was a Project Lecturer with the Department of Mechanical Engineering in 2016–2017. He was also a Visiting Researcher with Stanford University, Stanford, CA, USA, in 2012. His research interests include mechanical design, dynamics computation and motion control of humanoid robots and soft robots, biomechanical analysis based on human musculo-skeletal model, and modeling and control of swarm robots and pedestrian crowds. Dr Yamamoto is a Member of the Japan Society of Mechanical Engineers, the Robotics Society of Japan and IEEE.
Yoshihisa Shibata
Yoshihisa Shibata received his BEng and MEng degrees in Mechano-Informatics from the University of Tokyo in 2018 and 2020, respectively. He was Project Academic Support Staff at the University of Tokyo from 2020 to 2021. His research interests include soft robotics and hydraulic actuators. He is a member of JSME.
Mitsuo Komagata
Mitsuo Komagata is Project Assistant Professor, Department of Mechano-informatics, University of Tokyo. He received his BEng, MEng, and PhD degrees in Mechano-Informatics from the University of Tokyo in 2014, 2016, and 2020, respectively. He was Project Researcher at the University of Tokyo (2020). His research interests include actuations and mechanical design. He is a member of IEEE and RSJ.
Yoshihiko Nakamura
Yoshihiko Nakamura is Senior Researcher with Corporate Sponsored Research Program ‘Human Motion Data Science’, Research into Artifacts Center for Engineering, Graduate School of Engineering, University of Tokyo. He received PhD in 1985 from Kyoto University and held faculty positions in Kyoto University, University of California Santa Barbara and University of Tokyo. His fields of research started from redundancy of robot manipulators and kinodynamics of large DOF robot systems, and include humanoid robotics, cognitive robotics, neuro-musculoskeletal human model, and their computational algorithms. He is a recipient of King-Sun Fu Memorial Best Transactions Paper Award, IEEE Transaction of Robotics and Automation in 2001 and 2002, JSME Medal for Distinguished Engineers in 2019, Pioneer Award of IEEE-RAS in 2021, and Tateisi Prize Achievement Award in 2022. Dr Nakamura is Foreign Member of Academy of Engineering Science of Serbia, TUM Distinguished Affiliated Professor of Technische Universität München, Fellow of JSME, RSJ, and World Academy of Art and Science, Life Fellow of IEEE, and Professor Emeritus of University of Tokyo.