

Abstract
This paper focuses on load-side acceleration control of geared actuator that is modeled as a two-inertia system for industrial/non-industrial robot applications. This paper uses a load-side acceleration sensor that is capable of acquiring direct current components. Conventional load-side acceleration control has some high-frequency components due to the noise effect of an acceleration sensor due to the use of two observers that combines acceleration sensor. This paper proposes a load-side acceleration control system based on a load-side velocity disturbance observer and motor-side velocity controller for a geared actuator of an industrial robot with mechanical resonance. The proposed approach employs a motor-side velocity controller and a load-side velocity disturbance observer, which are employed to simplify the plant system, and compensate for the velocity disturbance on the load side, respectively. This approach has a structure in that the noise effect of the acceleration sensor is small compared with the conventional approach. The effectiveness of the proposed load-side acceleration controller is verified via theoretical analysis, numerical simulations, and practical experiments.
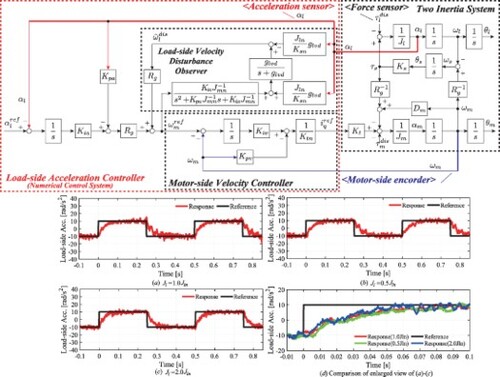
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Yusuke Kawai
Yusuke Kawai received B.E. degree in electrical engineering and the Ph.D. degree in Science of Technology Innovation from Nagaoka University of Technology, Nagaoka, Japan, in 2015 and 2020. He was Postdoctoral Research Associate at Nagaoka University of Technology from 2020 to 2021. He has been an Assistant Professor at National Institute of Technology, Ichinoseki College since 2021. His research interests include motion control and Haptics. He is a member of the Institute of Electrical Engineering of Japan (IEEJ) and the IEEE Industrial Electronics Society (IEEE IES).
Yuki Yokokura
Yuki Yokokura received the B.E. and M.E. degrees in electrical engineering from Nagaoka University of Technology, Niigata, Japan, in 2007 and 2009, respectively, and the Ph.D. degree in integrated design engineering from Keio University, Yokohama, Japan. He was a Visiting Fellow at Keio University, and a Postdoctoral Fellow at Nagaoka University of Technology in 2011. Dr. Yokokura was a JSPS (Japan Society for the Promotion of Science) Research Fellow (DC2 and PD) from 2010 to 2011. He was an Assistant Professor with Nagaoka University of Technology from 2012 to 2020, and he has been an Associate Professor since 2020. His research interests include motion control, motor drive, power electronics, and real-world haptics.
Kiyoshi Ohishi
Kiyoshi Ohishi received the B.E., M.E., and Ph.D. degrees in electrical engineering from Keio University, Yokohama, Japan, in 1981, 1983, and 1986, respectively. From 1986 to 1993, Prof. Ohishi was an Associate Professor with Osaka Institute of Technology, Osaka, Japan. Since 1993, he has been with Nagaoka University of Technology, Niigata, Japan. He became a Professor in 2003. His research interests include motion control, mechatronics, robotics and power electronics. He received twice ‘IEEJ Distinguished Paper Award’ from IEEJ in 2002 and 2009, respectively. He is an IEEE Fellow member from 2015. He is a Senior AdCom Member of IEEE IES Society from 2016, and he was an AdCom Member (elected) of IEEE IES Society for 12 years from 2004. He received the Outstanding Paper Awards at IECON' 85 and Best Paper Awards at IECON' 02, IECON' 04 from the IEEE Industrial Electronics Society. He is a General chair of IEEE IECON2015, AMC2010, AMC2016 and AMC2018.
Taiga Shinozaki
Taiga Shinozaki received B.E. degrees in electrical engineering from Nagaoka University of Technology, Nagaoka, Japan, in 2020. Now he is a candidate of the M.E. degree in Electrical, Electronics and Information Engineering. His research interests include motion control and real-world haptics. He is a member of the Institute of Electrical Engineering of Japan(IEEJ).