

Abstract
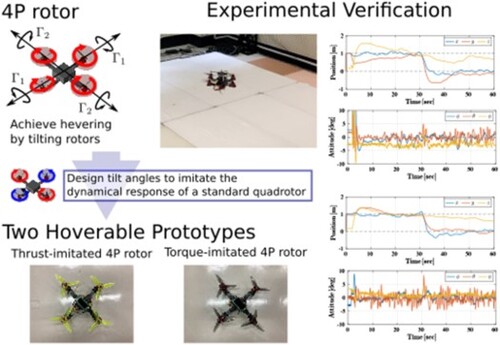
This paper presents a novel structure for a quadrotor, making it hover only with clockwise rotors, where we denote it as a 4P (Positive) rotor. We first investigate the condition for a 4P rotor to hover. More specifically, we conduct the hoverability analysis, which is closely related to the controllability analysis, and show that the tilting angles of each rotor are crucial conditions for the hoverability of the 4P rotor. The derived condition for the tilting angles is then utilized to present two prototypes. Each prototype is developed with the following design purposes: One is to reduce the horizontal force generated by the tilted rotors, and the other is to make its torque generation the same as that of a standard quadrotor. The hoverability and dynamical property of both prototype is demonstrated in simulations and experiments.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Takumi Ito
Takumi Ito received the B.Eng. degrees in control engineering from the Tokyo Institute of Technology, in 2021. He is currently with the Department of Systems and Control Engineering, Tokyo Institute of Technology, Tokyo, Japan. His research interests include analysis and control of mechanical systems, robotics, and nonlinear control.
Riku Funada
Riku Funada received the B.Eng., M.Eng., and Ph.D. degrees in control engineering from the Tokyo Institute of Technology, Tokyo, Japan, in 2014, 2016, and 2019, respectively. He was a Postdoctoral Researcher with Waseda University, Tokyo, in 2019, and with the University of Texas at Austin, Austin, TX, USA, in 2020. From 2016 to 2019, he was a Research Fellow of the Japan Society for the Promotion of Science. Since 2021, he has been an Assistant Professor with the Department of Systems and Control Engineering, Tokyo Institute of Technology, Tokyo. His research interests include cooperative control and strategic sensing for networked robotics and motion planning.
Shunsuke Mochida
Shunsuke Mochida received the B.Eng. and M.Eng. degrees in control engineering from the Tokyo Institute of Technology, Japan, in 2018 and 2020, respectively. He is currently working toward the Ph.D.Eng. degree with the Department of Systems and Control Engineering, Tokyo Institute of Technology, Tokyo, Japan. His research interests include analysis and control of mechanical systems and nonlinear control theory.
Takahiro Kawagoe
Takahiro Kawagoe received the B.Eng. degree in Control Engineering from the Tokyo Institute of Technology, in 2020. He is currently with the Graduate School, Tokyo Institute of Technology. His research interests include analysis and control of robotic systems and nonlinear optimal control.
Tatsuya Ibuki
Tatsuya Ibuki received the B.Eng., M.Eng., and Ph.D.Eng. degrees from Tokyo Institute of Technology in 2008, 2010, and 2013, respectively. He was a research fellow with the Japan Society for the Promotion of Science from 2012 to 2013, an assistant professor with the Department of Systems and Control Engineering, Tokyo Institute of Technology from 2013 to 2020, and a visiting scholar with the School of Electrical and Computer Engineering, Georgia Institute of Technology in 2019. Since 2020, he has been a senior assistant professor with the Department of Electronics and Bioinformatics, Meiji University. His research interests include cooperative control of robotic networks, fusion of control theory and machine learning, and vision-based estimation and control.
Mitsuji Sampei
Mitsuji Sampei received the B.Eng., M.Eng., and Dr.Eng. degrees in control engineering from Tokyo Institute of Technology in 1983, 1985 and 1987, respectively. From 1987 to 1993, he was a research associate and then an associate professor at Chiba University. Since 1993, he has been with Tokyo Institute of Technology where he is currently a professor at the Department of Systems and Control Engineering. His current research interests are in the field of nonlinear system theory, including underactuated systems, nonholonomic systems, robotics and H-infinity control theory.