

Abstract
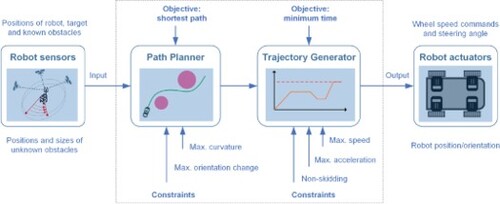
The paper proposes a new real-time motion planning technique for an autonomous mobile robot that is able to find a collision-free path and a corresponding time-optimal trajectory while taking into account limits on the actuator capacities and constraints from the wheel-ground adhesion. The proposed technique includes two sub-modules. The first one, an optimal path planner, is based on the discretization of the robot workspace and dynamic programming principle. It allows finding the shortest path in the robot environment to avoid obstacles and reach the robot target. The second one, an optimal trajectory generator, operates with the discretized robot state-space and also employs dynamic programming techniques. It produces a time-optimal motion along the obtained path, which may include numerous regular and singular trajectory sections caused by the simultaneous application of actuator and wheel-ground adhesion constraints. To adapt this technique to real-time implementation, a moving window strategy is presented that allows regularly updating the robot motion profile in a dynamic environment. The advantages of the developed technique and its suitability for real-time control are illustrated by experimental studies implemented on a car-like mobile robot.
GRAPHICAL ABSTRACT

Disclosure statement
No potential conflict of interest was reported by the author(s).
Correction Statement
This article has been republished with minor changes. These changes do not impact the academic content of the article.
Additional information
Notes on contributors
Jiuchun Gao
Jiuchun Gao received his Ph.D. degree in Mechanical Engineering from Ecole Centrale de Nantes (June 2018, France), where he worked on motion optimization for redundant robotic systems. He was a research engineer in mobile robotics with IMT-Atlantique, Nantes, from 2018 to 2021. His current research interests include autonomous driving, motion planning/control, vehicle dynamics and multi-robot systems.
Fabien Claveau
Fabien Claveau received the engineer’s degree from Ecole Nationale Supérieure d’Ingénieurs de Bourges, France, in 2001, and the Ph.D. in Automatic Control from the University of Nantes and Ecole Centrale de Nantes, France, in 2005. Since 2005, he has been an Assistant Professor with the IMT-Atlantique, and also a member of the Control Team of LS2N. His research interests are focused on robust control, decentralized and distributed control design methodologies. His main application field is automotive engineering, especially the design of driving assistances for conventional or more specific vehicles, or the control of autonomous vehicles.
Anatol Pashkevich
Anatol Pashkevich received his degree in Electrical Engineering (1977) and PhD in Control and Robotics (1982), both from Minsk Radio Engineering Institute, Belarus. Since 1987 he served as head of the Robotic Laboratory at Belarusian State University of Informatics and Radio Electronics. Currently he is head of the Control, Robotics and Interaction group at Department of Automation, Production and Computer Science, IMT-Atlantique, France. His research interests include robotics, manufacturing automation and computer-aided design. He is a Member of the TC Manufacturing Plant Control of IFAC.
Philippe Chevrel
Philippe Chevrel (Member, IEEE) received the Ph.D. degree from the University of Paris XI, Orsay, France. He is currently a professor with IMT-Atlantique, Nantes, France. He is the head of the Control Team, Laboratory of Digital Sciences of Nantes (LS2N), and a member of two research groups of the CNRS such as MOSAR (multi-variable robust control) and GTAA (automotive control). His research interests include robust and resilient control theory, active control, and multi-objective and structured estimation and control. He is also a member of the EEA and the IEEE Control Society.