
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
A practical procedure based on implicit time integration methods applied to the differential Lyapunov equations arising in the square root balanced truncation method is presented. The application of high-order time integrators results in indefinite right-hand sides of the algebraic Lyapunov equations that have to be solved within every time step. Therefore, classical methods exploiting the inherent low-rank structure often observed for practical applications end up in complex data and arithmetic. Avoiding the additional effort in treating complex quantities, a symmetric indefinite factorization of both the right-hand side and the solution of the differential Lyapunov equations is applied.
1. Introduction
Consider a linear time-varying (LTV) control system:
where ,
and
,
is the initial condition,
is the state vector,
is the input, and
is the output. The system matrices
,
,
and
are assumed to be continuous and bounded, and
is nonsingular for all
. Furthermore, without loss of generality, we may assume that
. It is also possible to consider second-order systems that can be reformulated to systems of the form (1), see, e.g. [Citation1,Citation2], and references therein.
In model-order reduction, we aim to find a reduced-order model:
with ,
and
such that
and the approximation error
is small in an appropriately chosen norm for all admissible inputs.
The paper is organized as follows. Section 2 reviews the balanced truncation model reduction framework for LTV systems, which is based on solving the differential Lyapunov equations (DLEs). Implicit time integration methods for such equations are discussed in Section 3. In Section 4, we present a method for the simulation of the reduced-order model as well as some numerical experiments demonstrating the performance of the proposed model reduction procedure. Finally, Section 5 contains some concluding remarks.
2. Balanced truncation for LTV systems
In this section, we briefly review a balanced truncation model order reduction method for LTV systems developed in [Citation3–Citation5]. This method relies on the reachability and observability Gramians and
defined for the LTV system (1) as the solutions of the DLEs:
The initial and final conditions are directly given from the alternate integral representations,
of the time-varying system Gramians, where is the transition matrix of the system, see, e.g. [Citation6, Chapter 9.2]. Note that
and
are both symmetric and positive semidefinite for all
. Then the product
has real nonnegative eigenvalues
. The Hankel singular values of system (1) are defined as
We assume that the Hankel singular values are ordered decreasingly, i.e.
Note that even if the individual singular values are continuously differentiable functions, this may not be true for the ordered sequence of the Hankel singular values. This is because the intersecting singular values and
for
swap their roles within the ordered sequence. This issue is implicitly handled by the integration method used for the solution of the reduced-order model (see Section 4).
The LTV system (1) is called balanced if for all
. Under certain conditions on system (1), see [Citation4,Citation5], one can find nonsingular system transformation matrices
and,
such that
is continuously differentiable and the transformed system:
is balanced. Then a reduced-order model (2) can be determined by truncating the state variables of in Equation (5) associated with the small Hankel singular values. In practice, we do not need to construct the balancing transformations
and
explicitly. Instead, the reduced-order model (2) can be computed by Algorithm 2, which is a generalization of the square root balanced truncation method developed in [Citation7,Citation8] for linear time-invariant systems.
Table
3. Solving DLEs
In this section, we discuss the numerical solution of the DLEs (3) and (4) needed as a first step to obtain the projection matrices and
. The observability DLE (4) has to be solved backward in time. Substituting
with
and taking into account that
with
, we obtain the DLE as
where ,
,
, and
. This initial value problem can then be solved analogously to the reachability DLE (3). Therefore, in the remainder, our investigations are restricted to the DLE (3), which can be written shortly as
where
Note that the DLE can be considered as a special case of the differential Riccati equation (DRE). Therefore, any integration method developed for the DREs [Citation9–Citation12] can also be employed for the DLEs. Here, we consider the backward differentiation formulas (BDFs) and the Rosenbrock methods only.
3.1. BDFs
Let with
be a discretization of the time interval
with the time step size
,
. The
-step BDF method applied to Equation (8) has the form
where is an approximation to
, and the coefficients
and
are given in . These coefficients are chosen such that the
-step BDF method has the maximum possible order
. Setting
,
and
, and assuming that
are already known, the matrix
can then be determined from the algebraic Lyapunov equation (ALE):
Table 1. Coefficients of the -step BDF method.
with . If the pencil
is stable, i.e. all its eigenvalues have negative real part, then
is stable too. In this case, the ALE (9) is uniquely solvable. For large-scale problems, it is recommended to never compute the full solutions
,
. Since in practice the solutions
have often numerically low ranks, low-rank solution methods [Citation13–Citation16] should be applied to the ALE (9). Note that for
some of the coefficients
,
, are positive, and hence the right-hand side of Equation (9) may become indefinite. If the matrices
, admit a so-called low-rank symmetric indefinite factorization
with
, symmetric
and
, then the right-hand side of the ALE (9) can be approximated by
where the factors and
are given by
In this case, an approximate solution of the ALE (9) can be determined in the factorized form using the
-type ADI or Krylov method presented in [Citation17,Citation18], respectively. Note that the application of the symmetric indefinite factorization-based solvers is recommended in order to avoid complex data and arithmetic which is introduced by classical low-rank factorization of the indefinite right-hand side. Since the low-rank factors
may increase within each time integration step, it is desirable to perform a column compression as proposed in ref. [Citation19] in order to reduce the number of columns of these factors and, as a consequence, to reduce the computational complexity of solving the ALE (9).
3.2. Rosenbrock methods
Following the descriptions for DREs in refs. [Citation9,Citation12,Citation18], a general -stage Rosenbrock method from ref. [Citation20, Chapter 9] applied to the DLE (8) with a constant mass matrix
reads
In the literature many authors, see, e.g. Hairer and G. Wanner [Citation21, Section IV.7], start their explanations for autonomous ordinary differential equation (ODE) systems. Then a general Rosenbrock scheme for non-autonomous ODEs is based on an autonomization and, thus, yields
In both cases, and
,
,
,
,
, and
are the method coefficients. In the latter scheme, defined for non-autonomous ODEs being autonomized,
denotes the time derivative
of
at
. This term may be disadvantageous for the stability of the method, see ref. [Citation20, Chapter 9.5] for details. Therefore, in the remainder, we neglect the time derivative
and restrict our considerations to scheme (11) defined for non-autonomous ODEs.
Note that we consider here a constant mass matrix . In general, the Rosenbrock schemes also apply to differential matrix equations with a time-varying matrix
. However, the use of
would considerably complicate the expressions because of the appearance of the mass matrix and its inverse at different time instances in the right-hand side of the ALEs to be solved inside the time integration method. Still, having a look at practical examples, requiring a constant mass matrix seems not to be a crucial restriction.
3.2.1. One-stage Rosenbrock method
The one-stage Rosenbrock scheme:
with and
represents the linear implicit Euler scheme of first order. Substituting
into the ALE (12), we obtain the ALE
Note that starting with , the solution
,
, of the ALE (13) is symmetric, positive semidefinite provided the pencil
is stable. Assuming the low-rank factorization,
, the right-hand side of the ALE (13) can be written as
Therefore, the classical low-rank ADI or (rational) Krylov subspace method [Citation13,Citation22] can be used for computing a low-rank solution of the ALE (13).
3.2.2. Two-stage Rosenbrock method
Based on the formulations for the DRE in refs. [Citation9,Citation12], the two-stage Rosenbrock scheme applied to the DLE (8) is given by
Note that in ref. [Citation23], the two-stage scheme is given in a different Rosenbrock representation than Equation (11). Formulations (14) and (15) fit into the general scheme (11) with ,
,
,
,
, and
. Now, we assume that the solutions at the previous time steps are given by
. Therefore, for the right-hand side of the first stage Equation (14), we obtain the low-rank symmetric indefinite factorization,
with the factors
Then the solution of (14) can be determined in a factorized form
with
and
. In this case, the right-hand side of the second stage Equation (15) can be written as
with
Therefore, the solution of Equation (15) can be computed in the form
with
and
yielding a low-rank symmetric indefinite factorization
with
The Rosenbrock methods of higher order can be extended to the DLE (8) in a similar way.
4. Numerical experiments
In this section, we present some numerical experiments for balanced truncation model reduction for LTV systems. In order to determine the reduced-order models, the DLEs (3) and (4) need to be solved. This is performed by using the symmetric indefinite factorization-based BDF methods of order ,
,
and
and the Rosenbrock schemes of order
and
, as described in Section 3. That is, a method depending number of ALEs has to be solved at every time step of the time integration method applied to the DLEs. Given the solutions
and
, the projection matrices
and
, needed to compute the reduced-order system matrices (6), are obtained by the application of the square root method. The entire procedure is presented in Algorithm 1.
For the simulation of the reduced-order model (2), the following approach is applied. First, we consider an approximation of the derivative
as it is known from the BDF methods. This allows us to vary the system dimension of the reduced-order model at every time step. Substituting this approximation into the reduced-order model,
which is equivalent to Equation (2), yields the linear system
Here, the expression realizes the possible change of system dimension by implicitly lifting the previous time solutions
with
to the full-order space and then again reducing the state dimension with
. This change between two low-dimensional subspaces solves the problem of intersecting Hankel singular values since the projection bases correspond to the correct sequence of the ordered Hankel singular values.
Note that for , we have the implicit Euler scheme
The reduced-order model (2) can also be solved using the Rosenbrock methods, which, however, are more involved.
4.1. Example 1
Consider the one-dimensional (1D) heat equation
with a moving heat source which describes the heat transfer along a beam of length . Here,
is the temperature distribution,
,
and
are the specific heat capacity, the mass density and the heat conductivity, respectively. Furthermore,
denotes the Dirac delta function, and
and
describe the position and the heat flux density, respectively, at time
. A finite element discretization of (19) with
equidistant grid points leads to system (1) with the time-invariant state matrices
and the time-varying input matrix
. Taking the output matrix as
corresponds to the observation of the temperature at the same position as the heat source. Thus, here we consider a single-input-single-output (SISO) system. Since,
,
,
, and the initial condition of the reachability DLE (3) and the final condition of the observability DLE (4) are also equal, we obtain
for
. Thus, we only have to solve one DLE in Step
of Algorithm 2. We consider a system dimension of
and the time horizon
with a time step size
. The heat source is chosen to be
and the heat position
. In this example, the truncation tolerance for the Hankel singular values is 1 × 10–10.
The computation times for solving the DLE (3) as well as for the application of the square root method are presented in . One can observe that the computation time for the solution of the DLEs increase with increasing order for both the BDF and the Rosenbrock methods that is not surprising. Increasing the order of the BDF methods means to include more information from the previous time steps and, therefore, the block size of the right-hand side factor of the ALE to be solved increases. In case of the Rosenbrock methods, the number of ALEs to be solved at every time step increases with the order
. In addition, it can be seen that the main effort for the computation of the projection matrices
and
is to solve the DLEs.
Table 2. Heated beam: the computation time for solving the DLE and the square root method.
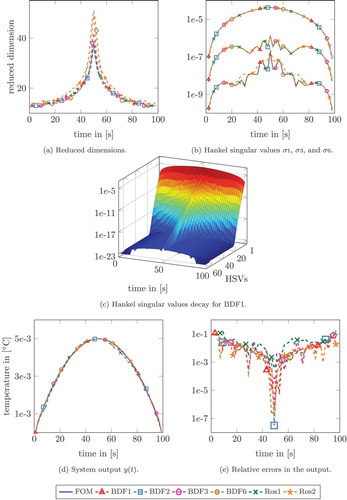
shows the dimensions of the reduced-order models corresponding to solutions of the DLEs based on the different DLE solvers (a), the Hankel singular values ,
and
for all integrators (b) and the decay of the Hankel singular values on the entire time horizon (c), respectively. The system outputs of the full and the reduced-order models as well as the related relative errors are depicted in ,). From these figures one observes that all considered time integrators show basically the same results. In addition, the behaviour of the Hankel singular values appears to be identical for all integration methods, see . This is, of course, expected, as long as the time integrators find the ‘correct’ solution to the DLEs (3) and (4).
Figure 1. Heated beam: (a) dimensions of the reduced state at different times, (b) the Hankel singular values ,
and
for the BDF methods of order
,
,
and,
and the Rosenbrock schemes of order
and
, (c) Hankel singular values for the BDF method of order 1, (d) the outputs of the full and the reduced-order models and (e) relative errors in the output.
4.2. Example 2
The second example describes a heat transfer model originating from an optimal cooling problem for the steel profile given in ref. [Citation24]. In order to obtain an LTV model, we have introduced an artificial time variability to the heat conduction coefficient entering the system matrix . As a result, we have the system (1) with constant matrices
and a time-varying system matrix
with
. This system has dimension
,
inputs and
outputs. The solution is computed on the time interval
with a time integration step size of
and an input
describing the heating of the steel profile. The Hankel singular values were truncated at a tolerance of 1 × 10–5. The computation times for the solution of the DLEs and the square root method are given in . The behaviour of the timings is similar to the previous example.
Table 3. Steel profile: the computation time for solving the DLE and the square root method.
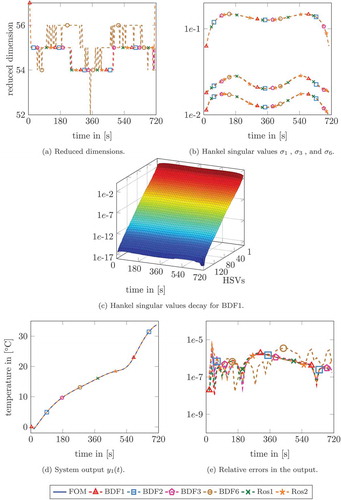
As for the first example, shows the reduced orders obtained by the different DLE solvers (a), the Hankel singular values ,
and
(b), and the Hankel singular values decay (c). Further, ,) depict the output trajectories of the full and the reduced-order models as well as the associated relative errors, respectively. In terms of their quality, these results are similar to those in the example above. Still, we observe that the BDF method of order
yields a wildly oscillating reduced-order and also a slightly worse relative error in the time interval
. An explanation might be given by the fact that the stability region of the BDF methods decreases for an increasing order
. In particular methods of order
are unstable as it is well known from the theory of BDF methods for ODEs. Furthermore, the stability region depends on the time step size. That is, for a certain step size
the results of the higher order methods might be worse. For a detailed discussion on stability of multistep methods for ODEs, see, for example, refs. [Citation21] and [Citation25].
Figure 2. Steel profile: (a) dimensions of the reduced state at different times, (b) the Hankel singular values ,
and
for the BDF methods of order
,
,
and
and the Rosenbrock schemes of order
and
, (c) Hankel singular values for the BDF method of order 1, (d) the outputs of the full and the reduced-order models and (e) relative errors in the output.
4.3. Example 3
In the third example, we consider the 1D Burgers equation,
describing a convection–diffusion problem with the diffusion coefficient v. The Burgers equation models turbulences, see [Citation26–Citation28], and can be used as a model for shock waves, supersonic flow about airfoils, traffic flows, acoustic transmission and many more. A spatial discretization using finite differences yields a nonlinear model equation. In order to obtain a linear model, a linearization around a pre-computed reference trajectory is applied. The resulting LTV model reads:
with and a time dependency given solely in
. For details on the linearization and discretization, see Hein [Citation29], and the references given therein. We consider a SISO system of dimension
. The matrix
is constructed in a way such that the input acts on a grid region of
of the grid nodes around the middle of the spatial domain
. That is,
for
and zero, otherwise. Here, floor denotes the MATLAB® built-in function that rounds the argument to the nearest integer value towards zero. The matrix
observes the grid point 5 spatial steps to the right of the middle point, i.e.
for
and zero, otherwise.
Note that the inhomogeneity in (21) does not affect the model reduction procedure. Following the procedure described in ref. [Citation30] for tracking control based on a common trick to handle inhomogeneities presented in, e.g. [Citation31], system (21) can be reformulated into a homogeneous state-space system (1) while the system matrices do not change.
The model is simulated on the time horizon with time step size
-
. The input is chosen to be
for
. The truncation tolerance for the Hankel singular values was 1 × 10–7. Analogously to the previous examples, shows the computation times for the solution of the DLEs and the square root method. In contrast to the other examples, here the computation time of the BDF method of order
exceeds those of the BDF2 and BDF3 method. This is due to the number of ADI steps taken for the solution of the ALE.
Table 4. Burgers equation: the computation time for solving the DLE and the square root method.
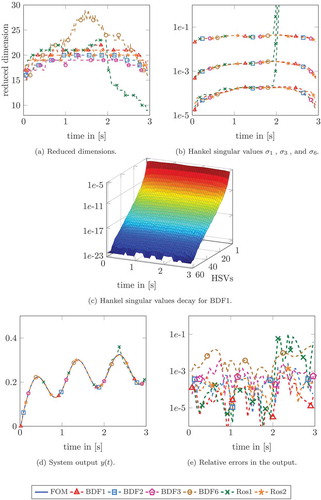
depicts the dimensions of the reduced-order models with respect to the DLE solution methods (a), the Hankel singular values ,
and
(b), the Hankel singular values decay over time (c), the output trajectories of the full and the reduced-order models (d), as well as the corresponding relative errors (e). The first-order Rosenbrock method results in an erroneous behaviour of the Hankel singular values. Thus, the reduced-order model is based on a corrupted truncation of the Hankel singular values. Therefore, the results of the Ros1 method in are less accurate compared to the other methods. A number of further computations based on much smaller step sizes
led to similar results for all the above methods. That is, for this specific example the Ros1 method requires a smaller step size increasing the computation time in order to achieve the same accuracy compared to the other methods. Further, we observe a decreasing accuracy for an increasing order
of the BDF methods. Here, again we emphasize that the stability region, that among others depends on the step size of the integration procedure, decreases with increasing order.
Figure 3. Burgers equation: (a) dimensions of the reduced state at different times, (b) the Hankel singular values ,
and
for the BDF methods of order
,
,
and
and the Rosenbrock schemes of order
and
, (c) Hankel singular values for the BDF method of order 1, (d) the outputs of the full and the reduced-order models and (e) relative errors in the output.
5. Conclusion
In the paper, we have presented the BDF and Rosenbrock time integration methods for the solution of the DLEs arising in the balanced truncation square root method for LTV dynamical systems. Using a low-rank symmetric indefinite factorization for the solution and the indefinite right-hand sides of the ALEs, that have to be solved inside the time integrators, complex data and arithmetic can be avoided. The numerical results show that the proposed integration methods yield satisfactory approximation with respect to the relative errors in the system outputs of the full and the reduced-order models. Further, the given examples show that the performance of the several time integrators strongly depends on the problem under consideration. In addition, regarding the computation time of the reduction bases we have observed that the main effort is to compute the solution to the DLEs. Thus, it might be still a challenge to apply the proposed balanced truncation procedure to LTV systems with a very large system dimension. In particular, the Rosenbrock methods of higher order seem to be very time consuming as one can conjecture from the timings for the two-stage Rosenbrock method.
Another interesting issue that needs to be discussed in the future is the initial and final condition of the reachability and observability Gramians, respectively. These conditions force the reduced state to be zero at the temporal boundaries, i.e.
, even if the full-order state fulfils
and
. For practical computations, it seems to be necessary to embed the time horizon
of interest in a sufficiently large interval
with
. Furthermore, the time dependent projection matrices do not allow an offline pre-computation of a global reduced-order model. That is, the full order system matrices need to be projected onto the low dimensional subspaces at every time step. Therefore, one should think of a sophisticated strategy to find a global set of projectors based on the time-varying projection bases.
Acknowledgements
This work was supported by the DFG project. The authors would like to thank Maximilian Huber for providing the heated beam example.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
Related Research Data
References
- P. Benner, P. Kürschner, and J. Saak, An improved numerical method for balanced truncation for symmetric second order systems, Math. Comput. Model. Dyn. Syst. 19 (2013), pp. 593–615.
- T. Reis and T. Stykel, Balanced truncation model reduction of second-order systems, Math, Comput. Model. Dyn. Syst. 14 (2008), pp. 391–406.
- H. Sandberg and A. Rantzer, Balanced truncation of linear time-varying systems, IEEE Trans. Automat. Control. 49 (2004), pp. 217–229.
- S. Shokoohi, L. Silverman, and P. Van Dooren, Linear time-variable systems: balancing and model reduction, IEEE Trans. Automat. Control. 28 (1983), pp. 810–822.
- E.I. Verriest and T. Kailath, On generalized balanced realizations, IEEE Trans. Automat. Control. 28 (1983), pp. 833–844.
- T. Kailath, Linear Systems, Prentice-Hall, Englewood Cliffs, NJ, 1980.
- A.J. Laub, M.T. Heath, C.C. Paige, and R.C. Ward, Computation of system balancing transformations and other applications of simultaneous diagonalization algorithms, IEEE Trans. Automat. Control. 32 (1987), pp. 115–122.
- M.S. Tombs and I. Postlethwaite, Truncated balanced realization of a stable nonminimal state-space system, Internat. J. Control. 46 (1987), pp. 1319–1330.
- P. Benner and H. Mena, Rosenbrock methods for solving Riccati differential equations, IEEE Trans. Automat. Control. 58 (2013), pp. 2950–2957.
- C. Choi and A.J. Laub, Efficient matrix-valued algorithms for solving stiff Riccati differential equations, IEEE Trans. Automat. Control. 35 (1990), pp. 770–776.
- L. Dieci, Numerical integration of the differential Riccati equation and some related issues, SIAM J. Numer. Anal. 29 (1992), pp. 781–815.
- H. Mena, Numerical solution of differential Riccati equations arising in optimal control problems for parabolic partial differential equations, Ph.D. thesis, Escuela Politecnica Nacional, 2007.
- P. Benner, P. Kürschner, and J. Saak, Efficient handling of complex shift parameters in the low-rank Cholesky factor ADI method, Numer. Algorithms. 62 (2013), pp. 225–251.
- P. Benner, P. Kürschner, and J. Saak, A reformulated low-rank ADI iteration with explicit residual factors, Proc. Appl. Math. Mech. 13 (2013), pp. 585–586.
- J.-R. Li and J. White, Low rank solution of lyapunov equations, SIAM J. Matrix Anal. Appl. 24 (2002), pp. 260–280.
- T. Penzl, Eigenvalue decay bounds for solutions of Lyapunov equations: the symmetric case, Systems Control Lett. 40 (2000), pp. 139–144.
- P. Benner, R.C. Li, and N. Truhar, On the ADI Method for Sylvester equations, J. Comput. Appl. Math. 233 (2009), pp. 1035–1045.
- N. Lang, H. Mena, and J. Saak, On the benefits of the factorization for large-scale differential matrix equation solvers, Linear Algebra Appl. 480 (2015), pp. 44–71.
- M. Bollhöfer and A.K. Eppler, Low-Rank Cholesky Factor Krylov subspace methods for generalized projected Lyapunov equations, in System Reduction for Nanoscale IC Design, P. Benner, ed., Mathematics in Industry, Springer International Publishing, Berlin, Heidelberg, 2016.
- K. Dekker and J.G. Verwer, Stability of Runge-Kutta Methods for Stiff Nonlinear Differential Equations, Elsevier, Amsterdam, 1984.
- E. Hairer and G. Wanner, Solving Ordinary Differential Equations II – Stiff and Differential-Algebraic Problems, Springer Series in Computational Mathematics, Vol. 14, Springer-Verlag, Berlin, Heidelberg, 2002.
- V. Druskin and V. Simoncini, Adaptive rational Krylov subspaces for large-scale dynamical systems, Systems Control Lett. 60 (2011), pp. 546–560.
- J.G. Verwer, E.J. Spee, J.G. Blom, and W. Hundsdorfer, A second Order Rosenbrock method applied to Photochemical dispersion problems, SIAM J. Sci. Comput. 20 (1999), pp. 1456–1480.
- P. Benner and J. Saak, Linear-quadratic regulator design for optimal cooling of steel profiles, Technical Report SFB393/05-05, Sonderforschungsbereich 393 Parallele Numerische Simulation für Physik und Kontinuumsmechanik, TU Chemnitz, D-09107 Chemnitz, 2005 Available from http://www.tu-chemnitz.de/sfb393/sfb05pr.html.
- E. Hairer, S.P. Nørsett, and G. Wanner, Solving Ordinary Differential Equations I – Nonstiff Problems, second, Springer Series in Computational Mathematics, 2nd ed., Vol. 8, Springer-Verlag, Berlin Heidelberg, 1993.
- J.M. Burgers, Application of a model system to illustrate some points of the statistical theory of free turbulence, Proc. Roy. Netherl. Acad. Sci. (Am- sterdam). 43 (1940), pp. 2–12.
- J.M. Burgers, A Mathematical model illustrating the theory of turbulence, Adv. Appl. Mech. 1 (1948), pp. 171–199.
- J.M. Burgers, Statistical problems connected with asymptotic solutions of the one-dimensional nonlinear diffusion equation, in Statistical Models and Turbulence, M. Rosenblatt and C. Van Atta, eds., Lecture Notes in Physics, Vol. 12, Springer, Berlin Heidelberg, 1972, pp. 41–60.
- S. Hein, MPC-LQG-based optimal control of parabolic PDEs, Ph.D. thesis, TU Chemnitz, 2009.
- P. Benner, S. Görner, and J. Saak, Numerical solution of optimal control problems for parabolic systems, in Parallel Algorithms and Cluster Computing. Implementations, Algorithms, and Applications, K.H. Hoffmann and A. Meyer, eds., Lect. Notes Comput. Sci. Eng., Vol. 52, Springer-Verlag, Berlin/Heidelberg, 2006, pp. 151–169.
- S.K. Godunov, Ordinary Differential Equations with Constant Coefficient, Translations of Mathematical Monographs, Vol. 169, AMS, Providence, RI, 1997.