
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper focuses on event-trigger control of automotive suspension systems. Firstly, fuzzy T-S systems which suitable for automobile suspension systems are studied. Parameter uncertainties and disturbances are included in the fuzzy T-S systems. Secondly, based on linear matrix inequalities (LMIs) and Lyapunov function, the conditions for the stability of fuzzy T-S systems are given. In the meantime, the controller and observer of the fuzzy T-S systems are designed. Finally, the theory is applied to the automotive suspension systems in the simulation.
1. Introduction
More and more attention has been paid to the quality of automobile performance. Comfort is an important factor to measure the automobile performance. How to improve the driving comfort is a hot issue, the automobile suspension systems are closely related to the comfort. Because of the change of vehicle load and passenger number, the vehicle suspension systems become parameter uncertain systems. It is more suitable to use T-S systems to study automobile suspension systems (Jamal et al., Citation2019; Li et al., Citation2011; Wang et al., Citation2019).
Event-trigger is a core concept in modern industrial information technology. In recent years, the research of event-triggered technology has made rapid progress in the control field (Han & Antsaklis, Citation2013; Hu & Yue, Citation2012; Wang et al., Citation2017). For linear networked systems, Hu and Yue (Citation2012) designed event-triggered control design. Han and Antsaklis (Citation2013) gave event-triggered observer and observer-based controller for networked systems. However, there is no vehicle suspension system involved in the above event-trigger control.
In this paper, for the automotive suspension systems, we study event-trigger control. Firstly, fuzzy T-S systems which parameter uncertainties and disturbances are considered. Using LMIs and Lyapunov function, the conditions of the stability are proposed. In numerical simulation, the fuzzy model is applied to the vehicle suspension systems.
The main contributions of this paper can be summarized as follows:
The paper studies observer-based event-triggered control and application in active suspension vehicle systems. Note that (Han & Antsaklis, Citation2013; Hu & Yue, Citation2012) also studied event-trigger control, however, control methods are not applied to the vehicle suspension system.
Event-trigger control methods are studied in active suspension vehicle systems. Note that (Jamal et al., Citation2019; Wang et al., Citation2021) also studied the vehicle suspension system, however, Jamal et al. (Citation2019) and Wang et al. (Citation2021) investigated control methods are not event-triggered control methods.
2. Problem statement
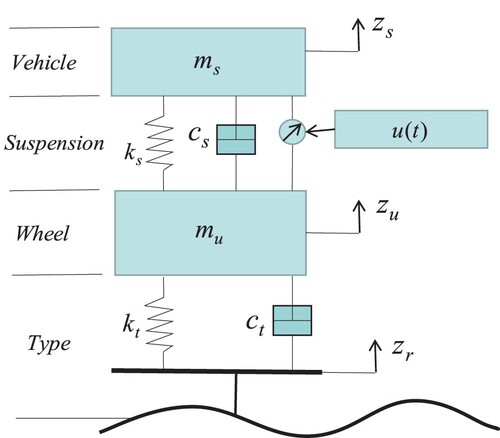
The dynamic equation of the quarter-car suspensionsystem is established as Wang et al. (Citation2019)
(1)
(1) where
is relative displacement of vehicle body,
is relative displacement of vehicle wheel,
is velocity of vehicle wheel vibration.Denote
,
,
. The quarter-car suspension system is shown in Figure .
Figure 1. Quarter-car suspension system.
In order to study the automobile suspension system, we first study the following fuzzy system. In the simulation, the theoretical part is applied to the automobile suspension system. The considered T-S fuzzy systems with the following state space equation.
If is
and ··· and
is
, then
(2)
(2) where
denotes fuzzy set;
denotes premise variable vector;
denotes state vector;
denotes input vector;
denotes output vector;
denotes input disturbance;
denotes output disturbance;
,
,
,
,
,
denote given matrices;
,
denote the parametric uncertainties.
The T-S fuzzy systems can be described as follows:
(3)
(3) where
,
,
,
.
The fuzzy state observer is expressed by
(4)
(4) The event-trigger condition is designed as follows (Wang et al., Citation2017)
(5)
(5) where ρ is a positive number,
is a designed matrix,
is estimation error,
,
.
3. Controller design and main results
The controller is designed based on the sampled observer If is
, and
is
and ··· and
is
, then
(6)
(6) where
are control gain matrices with appropriate dimension. Fuzzy controller is designed as follows:
(7)
(7) The difference between
and
is considered, the following inequalities hold (Zhao et al., Citation2015)
where
and
are two positive scalars.
By inserting (Equation7(7)
(7) ) into (Equation3
(3)
(3) ), observer equation is expressed as follows:
(8)
(8) Let
, we can obtain the fuzzy closed-loop system
(9)
(9)
Theorem 3.1
Given scalars , I is identify matrix, if there exist positive definite matrices
,
, such that the inequality holds
(10)
(10)
then the fuzzy system (Equation9
(9)
(9) ) is asymptotically stable. The control and observe gain matrices are designed as follows
Proof.
Consider Lyapunov function as follows
(11)
(11)
(12)
(12) By inserting the closed-loop system (Equation9
(9)
(9) ) into (Equation12
(12)
(12) )
(13)
(13) The uncertainties of system can be represented as
where
are unknown uncertainties satisfying
.
Applying Young's inequality and event trigger condition, (Equation13(13)
(13) ) converted to
(14)
(14) Combining (Equation14
(14)
(14) ), we can obtain as follows:
(15)
(15) where
.
(16)
(16)
performance index is taken as follows:
(17)
(17) According to Equation (Equation10
(10)
(10) ) with zero initial conditions, Equation (Equation17
(17)
(17) ) can be converted to
Finally, we get inequalities (Equation10
(10)
(10) ).
Multiplying the sides of (Equation10(10)
(10) ) by matrix
and applying Schur complement formula, we obtain the inequalities as follows:
(18)
(18)
Applying the Schur complement formula,
isconverted to
(19)
(19) By solving LMIs (Equation19
(19)
(19) ), the matrices
and the control gain matrices
are obtained, then put
and
into (Equation18
(18)
(18) ).
Applying the Schur complement formula, (Equation18(18)
(18) ) becomes
(20)
(20)
By solving LMIs (Equation20
(20)
(20) ), the matrices
and the observe gain matrices
are obtained.
4. Simulation
The related parameters of Equation (Equation3(3)
(3) ) are listed asfollows:
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
.
According to the mechanical structure of the suspension, the above factors change the mass of the spring and the mass under the spring, assuming that they change in a fixed range
,
,
,
,
,
,
,
,
,
,
.
On the basis of LMIs, and
(
) are obtained as follows:
,
,
,
. Thus, the simualtion results are displayed in Figures –, where Figures – are the trajectories of states
and their estimations
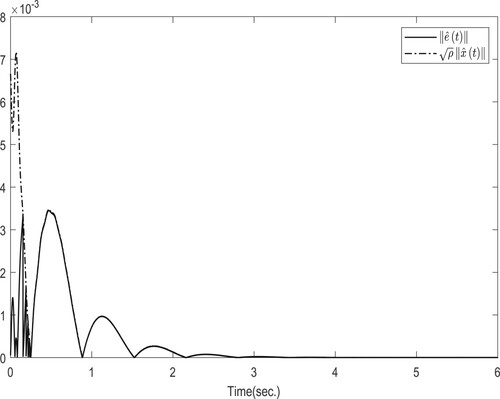
; is the curve of control input u; are the curves of event-triggered respobse.
Figure 2. Trajectories of and
.
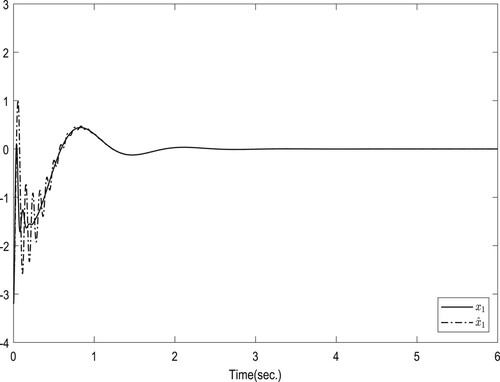
Figure 3. Trajectories of and
.
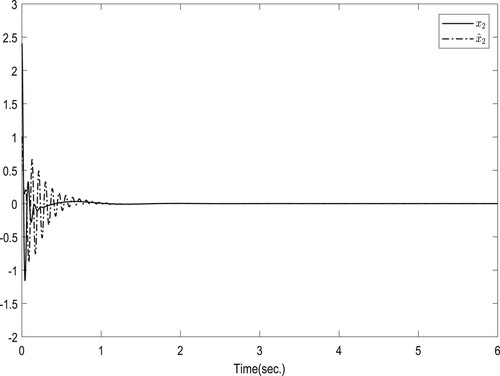
Figure 4. Trajectories of and
.
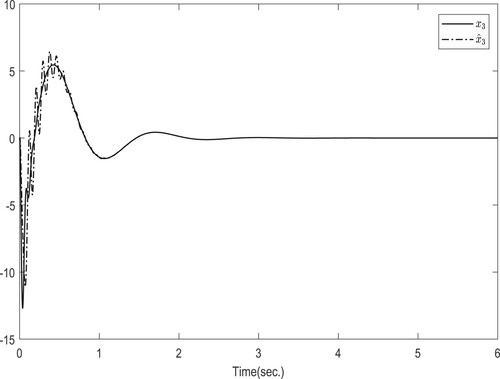
Figure 5. Trajectories of and
.
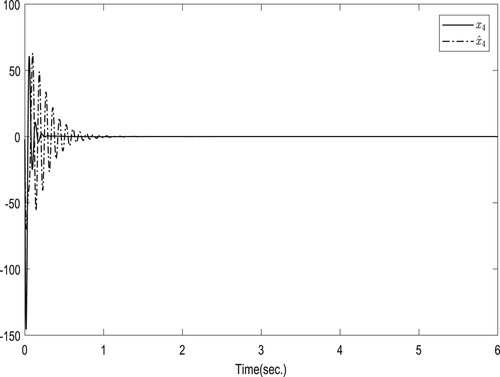
Figure 6. Trajectory of input u.
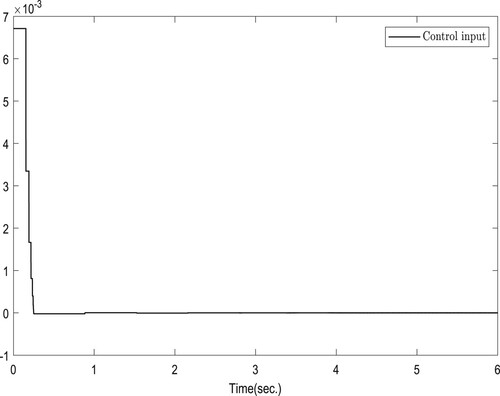
Figure 7. Trajectories of event-triggered response.
5. Conclusion
This paper has designed event-trigger control for the fuzzy T-S systems with parameter uncertainties and disturbances. The conditions of the asymptotically stability are proposed by LMIs and Lyapunov function. Simulation are given for the vehicle suspension systems.
In the future, we will pay more attention to on multi-agent nonlinear systems such as a separation-based methodology to consensus tracking of switched high-order nonlinear multi-agent systems, consensus in high-power multi-agent systems with mixed unknown control directions and so on. It will be a challenging job.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Han, Y., & Antsaklis, P. J. (2013). Event-triggered output feedback control for networked control systems using passivity: achieving L2 stability in the presence of communication delays and signal quantization. Automatica, 49(1), 30–38. https://doi.org/10.1016/j.automatica.2012.09.005
- Hu, S., & Yue, D. (2012). Event-triggered control design of linear networked systems with quantizations. ISA: Transactions, 51(1), 153–162. https://doi.org/10.1016/j.isatra.2011.09.002
- Jamal, M., Tissir, E. H., & Ouahi, M. (2019). Fuzzy fault-tolerant H∞ control approach for nonlinear active suspension systems with actuator failure. Procedia Computer Science, 148, 465–474. https://doi.org/10.1016/j.procs.2019.01.059
- Li, H. Y., Liu, H. H., & Gao, H. J. (2011). Actuator delayed active vehicle suspension control: A T-S fuzzy approach. 2011 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE 2011), 2358–2363. https://doi.org/10.1109/FUZZY.2011.6007581
- Wang, H., Bai, W., Zhao, X., & Liu, P. X. (2021). Finite-time-prescribed performance-based adaptive fuzzy control for strict-feedback nonlinear systems with dynamic uncertainty and actuator faults. IEEE Transactions on Cybernetics, https://doi.org/10.1109/TCYB.2020.3046316.
- Wang, J., Zhang, P., & Ni, W. (2017). Observer-based event-triggered control for consensus of general linear MASs. IET Control Theory & Applications, 11(18), 3305–3312. https://doi.org/10.1049/cth2.v11.18
- Wang, K., He, R., & Li, H. (2019). Observer-based control for active suspension system with time-varying delay and uncertainty. Advances in Mechanical Engineering, 11(11), 1–13. https://doi.org/10.1177/1687814019889505
- Zhao, D., Zhang, Q., Li, X., & Kong, L. D. (2015). Event-triggered H∞ control for continuous-time nonlinear system[C]//International symposium on neural networks (pp. 62–70). Springer .