

Abstract
Transformable multi-links aerial robots have great potentials in application relying on the transformable features to change its shape during the flight. Compared to traditional quadrotor robots, transformable multi-links robots are equipped with servo motor between links. To simplify the non-linear dynamic system, the previous work restricts the robot to transform in very slow speed so that the robot could be approximated as a quadrotor robot at each time point. However, tradeoff comes as the dynamic performance is given up. In this paper, we come up with a new framework combining of computationally efficient non-linear model predictive controller and motion primitive to optimize thrust force and joints trajectory of the multi-links aerial robot. Finally, we verify our framework with fast transformation motions and table tennis task which requires dynamic performance.
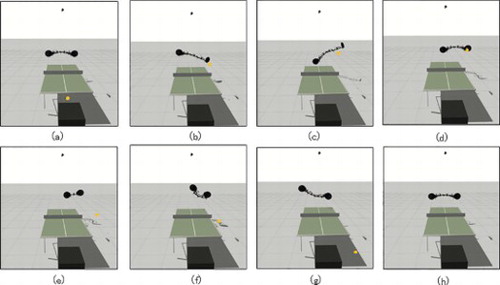
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
Notes
* This paper is selected as the ‘Cutting Edge of Robotics in Japan’ by the Editorial Committee of Advanced Robotics.
Additional information
Notes on contributors
Fan Shi
Fan Shi is a Doctor Student in the Department of Creative-Informatics of Graduate School of Information Science and Technology at The University of Tokyo. He received BE in Machine Intelligence at Peking University in 2016, MS in Creative-Informatics of Graduate School of Information Science and Technology at The University of Tokyo in 2018. He worked as a research assistant in the JSK Lab, The University of Tokyo from 2018. His research interests include aerial robots, flight control and motion planning.
Moju Zhao
Moju Zhao is an assistant professor of Mechano-Informatics of The University of Tokyo from 2018. He received BE in Mechanical Engineering at The University of Tokyo in 2013. He received MS and PhD in Mechano-Informatics from The University of Tokyo in 2015 and 2018, respectively. He worked as a research fellow of the Japan Society for the Promotion of Science from 2015 to 2018. His research interests include aerial robots, flight control, mechanical design, and computer vision. He has received several awards including Best Paper Award of 29th (2015) in The Robotics Society of Japan, 2017 Advanced Robotics Best Paper Award and Best Paper Award on Unmanned Aerial Vehicles in ICRA2018.
Tomoki Anzai
Tomoki Anzai is a Doctor Student in the Department of Mechano-Informatics of Graduate School of Information Science and Technology at The University of Tokyo. He received BE in Mechanical Engineering at The University of Tokyo in 2017, MS in Mechano-Informatics from The University of Tokyo in 2019. He worked as a research fellow of the Japan Society for the Promotion of Science from 2019. His research interests include aerial robots, flight control and mechanical design.
Keita Ito
Keita Ito is a Master Student in the Department of Creative-Informatics of Graduate School of Information Science and Technology at The University of Tokyo. He received BE in Mechanical Engineering at The University of Tokyo in 2019. He worked as a research assistant in the JSK Lab, The University of Tokyo from 2019. His research interests include aerial robots, hybrid locomotion and mechanical design.
Xiangyu Chen
Xiangyu Chen is a Researcher in the Department of Creative-Informatics of Graduate School of Information Science and Technology at The University of Tokyo. He received PhD in Creative-Informatics from The University of Tokyo in 2017. He received MS in School of Electronics Engineering and Computer Science at Peking University in 2014. His research interests include hardware design, computer vision and circuits design.
Shunichi Nozawa
Shunichi Nozawa received BE in Mechanical Engineering from The University of Tokyo in 2008. He received MS and PhD in Mechano-Informatics from The University of Tokyo in 2010 and 2013, respectively. He received IEEE Robotics and Automation Society Japan Chapter Young Award (ICRA2012) in 2012. He was a Research Fellowship for Young Scientists of JSPS from 2010 to 2013. He was an assistant professor of Mechano-Informatics of The University of Tokyo from 2013 to 2016. He was a project lecturer of Creative-Informatics of The University of Tokyo from 2016 to 2018. His research interests include object manipulation, motion control, and motion planning by a humanoid robot.
Kei Okada
Kei Okada received BE in Computer Science from Kyoto University in 1997. He received MS and PhD in Information Engineering from The University of Tokyo in 1999 and 2002, respectively. From 2002 to 2006, he joined the Professional Programme for Strategic Software Project in The University of Tokyo. He was appointed as a lecturer in the Creative Informatics at The University of Tokyo in 2006, an associate professor in the Department of Mechano-Informatics in 2009, a professor in the Department of Mechano-Informatics in 2018. His research interests include humanoids robots, real-time 3D computer vision, and recognition-action integrated system.
Masayuki Inaba
Masayuki Inaba is a professor in the Department of Mechano-Informatics, School of Information Science and Technology, The University of Tokyo. He graduated from the Department of Mechanical Engineering, The University of Tokyo, in 1981, and received MS and PhD degrees from the Graduate School of Information Engineering, The University of Tokyo, in 1983 and 1986. He was appointed as a lecturer in the Department of Mechanical Engineering, The University of Tokyo, in 1986, an associate professor, in 1989, and a professor in the Department of Mechano-Informatics, in 2000. His research interests include key technologies of robotic systems and software architectures to advance robotics research. His research projects have included hand-eye coordination in rope handling, vision-based robotic server systems, remote-brained robot approach, whole-body behaviors in humanoids, robot sensor suits with electrically conductive fabric, and developmental software systems for evolving a robot body with a spine. He has received several awards including outstanding Paper Awards in 1987, 1998, and 1999 from the Robotics Society of Japan, JIRA Awards in 1994, ROBOMECH Awards in 1994 and 1996 from the Division of Robotics and Mechatronics of the Japan Society of Mechanical Engineers, and Fellow of the Robotics Society of Japan in 2008. Currently, he is a Chair of the Department of IRT Systems Study, Information and Robot Technology Research Initiative, The University of Tokyo.