

Abstract
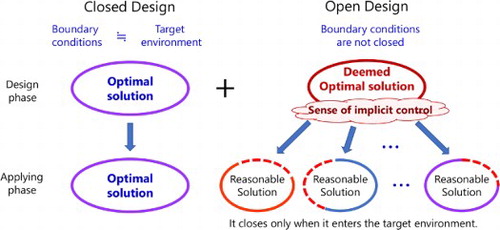
In this paper, the socio-economic problems facing the construction industry in Japan are presented, including the COVID19 pandemic, an aging population, aging infrastructure, and severe natural disasters, and a project to tackle the problem is introduced. This project, called ‘Collaborative robots for adaptation of diverse environments and innovation of infrastructure construction,’ is a sub-project of the Moonshot project organized by the Cabinet Office in Japan. The key approach to proceeding with this project is an ‘open design’ for robotics. Based on this approach, three aspects of the research plans are introduced: (1) robots that flexibly adapt to the environment, (2) Many-modal AI for environment evaluation, and (3) Physical AI and dynamic collaboration of multi-robots.
GRAPHICAL ABSTRACT
Acknowledgments
The authors would like to thank Editage (www.editage.com) for English language editing.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Keiji Nagatani
Keiji Nagatani received his PhD from the University of Tsukuba in 1997. He was a postdoctoral fellow at Carnegie Mellon University from 1997 to 1999, a lecturer at Okayama University from 1999 to 2005, and an associate professor at Tohoku University from 2005 to 2019. Currently, he is a project professor in the University of Tokyo from 2019. His research interest is field robotics, which includes improvement of traversal ability for all terrain robots, the autonomy of inspection robots, and intelligent functions for construction machines. He is a Member of the RSJ, SICE, JSME, JSASS and IEEE.
Masato Abe
Masato Abe received his PhD from Northwestern University in 1995. Currently, he is the Chief Researcher of R&D Lab of Basis Consulting, Inc., Japan. His research interest is bridge and structural engineering, natural disaster sciences, and field innovation of infrastructure management. He is a Member of the JSCE and ASCE.
Koichi Osuka
Koichi Osuka is currently a Professor of Department of Mechanical Engineering in Osaka University. He is a Member of The Philosophical Association of Japan, The Japan Society of Mechanical Engineers (Fellow), The Robotics Society of Japan (Fellow), The Society of Instrument and Control Engineers (Fellow), The Institute of Systems, Control and Information Engineers?Past President)? Areas of interest are the following. Implicit and Explicit Control, Robust and Adaptive Control of Manipulator, Passive Dynamic Walk, Control Engineering, Mechatronics, Rescue Engineering.
Pang-jo Chun
Pang-jo Chun received B.E. and M.E. from the Faculty of Engineering, the University of Tokyo in 2003 and 2005, respectively, and received Ph.D. degrees from Wayne State University in 2010. He worked as a research associate at Yonsei University from June 2010 to November 2010, and then moved to Ehime University as an assistant professor. He worked at Ehime University until March 2018, and then started working as a project associate professor at the Graduate School of Engineering, the University of Tokyo from April 2018, where he is currently working. His research interest is in civil engineering, especially in the application of ICT technology to the maintenance and management of bridges and tunnels. He received the Telford Premium Award from Institute of Civil Engineers in 2020, etc. He is the member of JSCE and JCI.
Takayuki Okatani
Takayuki Okatani received his B. Sc., M.Sc., and Ph. D degrees in Mathematical Engineering and Information Physics from Graduate School of Engineering at Tokyo University, 1994, 1996, and 1999, respectively. Currently, he is a Professor in Computer Vision at Tohoku University. He also serves as a Leader of Infrastructure Management Robotics Team at RIKEN Center for Advanced Intelligence Project (AIP) from 2016. His research interests are in the field of computer vision and machine learning. He is a member of IEEE, IPSJ, IEICE, and SICE.
Mayuko Nishio
Mayuko Nishio received her PhD from the University of Tokyo in 2009. She was a postdoctoral fellow at the Los Alamos National Laboratory and the University of Tokyo from 2009 to 2011, and an associate professor at Yokohama National University from 2011 to 2019. Currently, she is an associate professor in the University of Tsukuba from 2019. Her research field is structural engineering with interests in structural health monitoring, numerical model updating, inverse problem, data assimilation, and application of machine learning to maintenance of infrastructures. She is a Member of the JSCE, IABSE, JSCES, and ISHMII.
Shota Chikushi
Shota Chikushi received his PhD from the Kyushu Institute of Technology in 2018. From 2018 to 2020, he was a project assistant professor at The University of Tokyo. Since 2020, he is an assistant professor at The University of Tokyo. His research interests are field robotics and unmanned construction system. He is a member of IEEE, RSJ and JSPE.
Takamitsu Matsubara
Takamitsu Matsubara received his Ph.D. in information science from the Nara Institute of Science and Technology, Nara, Japan, in 2007. From 2005 to 2007, he was a research fellow (DC1) of the Japan Society for the Promotion of Science. From 2013 to 2014, he was a visiting researcher of the Donders Institute for Brain Cognition and Behaviour, Radboud University Nijmegen, Nijmegen, The Netherlands. He is currently an associate professor at the Nara Institute of Science and Technology and a visiting researcher at the ATR Computational Neuroscience Laboratories, Kyoto, Japan. His research interests are machine learning and control theory for robotics.
Yusuke Ikemoto
Yusuke Ikemoto received his Ph.D. from Nagoya University in 2006. He was a postdoctoral fellow at The University of Tokyo from 2006 to 2010, and was an Assistant Professor at University of Toyama from 2010 to 2015. Currently, he is an Associate Professor at Meijo University, where he is currently working. He was a Visiting Professor at EPFL from 2017 to 2018. His research interests include modular systems, distributed autonomous robotics, and embodiment robotics.
Hajime Asama
Hajime Asama received M. S., and Dr. Eng. from UTokyo (the University of Tokyo) in 1984 and 1989. He worked at RIKEN, Japan from 1986 to 2002, became a professor of RACE (Research into Artifacts, Center for Engineering) of UTokyo in 2002, a professor of School of Engineering since 2009, and the director of RACE since 2019. He received SICE System Integration Division System Integration Award for Academic Achievement in 2010, JSME Award (Technical Achievement) in 2018, etc. He was the vicepresident of RSJ in 2011–2012, an AdCom? member of IEEE Robotics & Automation Society in 2007–2009. Currently, he is the president of IFAC since 2020. He is a council member of the Science Council of Japan since 2017. He is a Fellow of IEEE, JSME, and RSJ. His main research interests are service robotics, distributed autonomous robotic systems, embodied brain science systems, and cognitive ergonomics.