

Abstract
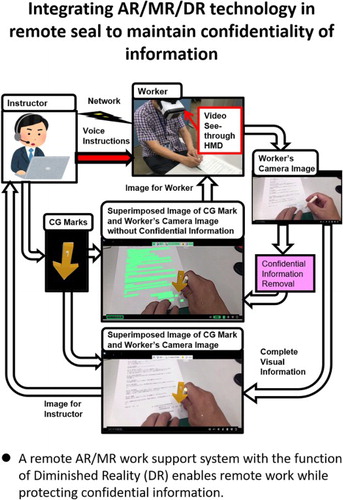
The integration of augmented reality/mixed reality (AR/MR) technology in remote work support technologies helps in the performance of various tasks remotely because it guides workers in the field from a remote location. However, teleworking has two major obstacles, namely, stamping and signing. Diminished reality (DR) technology can be used to erase or hide information, such as text in the image that can be seen by the unauthorized worker, and the AR/MR technology allows the remote authorized instructor to guide the worker. Thus, it is possible to remotely affix a seal while protecting confidential information. Furthermore, the concept of remote signature is proposed and explained. The proposed methodology makes it possible for employees who do not have the authority to view confidential documents, or employees of the agency, to handle and perform work on those confidential documents. In essence, the worker becomes a tele-robot whom the instructor does not have to worry about in regards to confidentiality issues.
GRAPHICAL ABSTRACT
Acknowledgements
We would like to express our deepest gratitude to the members of the Nakamura Laboratory, Hosei University, for their collaboration during our experiments. We would also like to thank Robert Poll for approving the use of images from Line-us.com; although we did not use them, but instead used real images.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Correction Statement
This article has been republished with minor changes. These changes do not impact the academic content of the article.
Additional information
Notes on contributors
Eimei Oyama
Eimei Oyama received the B.E. and M.E. degrees in Aeronautics from the University of Tokyo in 1985 and 1987, respectively. He received the Dr. Eng. degree in Mathematical Engineering and Information Physics from the University of Tokyo in 2000. In 1987, Eimei Oyama joined the Mechanical Engineering Laboratory, Ministry of International Trade and Industry Japan. The laboratory and the other 15 governmental laboratories were integrated into National Institute of Advanced Industrial Science and Technology (AIST) in 2001. He is currently a senior researcher of Field Robotics Research Team of Industrial CPS Research Center of AIST. From 2007 to 2009, he worked as the program officer of the Coordination Program of Science and Technology Projects (Next Generation Robots), Council for Science and Technology Policy (CSTP), which defines themes of national and social importance worthy of promotion, and coordinates related ministries in Japan. In 2012, he won the Netexplo 2012 award as the developer of the Wearable Behavior Navigation System. He research interests include Robotics, Virtual/Augmented Reality/Mixed Reality, and Remote Assistance.
Motoki Yodowatari
Motoki Yodowatari received his bachelor's degree in 2021 from the Department of Electrical and Electronic Engineering, Faculty of Science and Technology, Hosei University. He entered the Department of Electrical and Electronic Engineering, Graduate School of Science and Engineering, Hosei University in 2021. His current research interests include human augmentation and research on remote work support systems using AR/MR/DR technologies.
Sousuke Nakamura
Sousuke Nakamura received his B.E., M.E., and Dr. Eng. degrees in electrical engineering from the University of Tokyo, Tokyo, Japan, in 2005, 2007, and 2012, respectively. He joined Chuo University as an Assistant Professor in 2012, and moved to Hosei University where he has served as a Lecturer since 2016, and is currently working as an Associate Professor since 2018. His current research interests include human augmentation, assistive robotics and its power infrastructure including wireless power transfer. Dr. Nakamura is a member of the Society of Instrument and Control Engineers of Japan, the Japan Society for Fuzzy Theory, the Institute of Electrical Engineers of Japan, the Virtual Reality Society of Japan, the Japan Society of Mechanical Engineers, the Robotics Society of Japan and the IEEE.
Kohei Tokoi
Kohei Tokoi is an Associate Professor in the Faculty of Systems Engineering at Wakayama University in Japan. He completed his M.S. at Toyohashi University of Technology in 1986 and joined the Faculty of Economics at Wakayama University. In 1995, he moved to the Faculty of Systems Engineering, where he is currently teaching and researching computer graphics and virtual reality. He received his PhD in Engineering from Osaka University in 2002.
Arvin Agah
Arvin Agah is the Dean of Engineering and Professor of Electrical Engineering and Computer Science at the University of Kansas, which he joined in 1997. His research interests include applied artificial intelligence and autonomous mobile robots. He has been a researcher at the Bio-Robotics Division of Mechanical Engineering Laboratory in Tsukuba, Japan; IBM Los Angeles Scientific Center in Santa Monica, California; and Xerox Research Center in Rochester, New York and El Segundo, California. Dr. Agah has taught short courses at the Department of Engineering Systems at the University of Tsukuba in Japan; Center of Excellence in Remote Sensing Education and Research at Elizabeth City State University in North Carolina (HBCU); and Department of Mechanical Engineering at University of Canterbury in Christchurch, New Zealand. He received his B.A. in Computer Science with Highest Honors from the University of Texas at Austin; an M.S. in Computer Science from Purdue University; and an M.S. in Biomedical Engineering and a Ph.D. in Computer Science from the University of Southern California.
Hiroyuki Okada
Hiroyuki Okada received PhD degree from the Graduate School of Bio-Applications and Systems Engineering, Tokyo University of Agriculture and Technology, Tokyo, Japan in 2000. He is interested in a wide variety of subjects, from language acquisition in infants to speech recognition systems for robots. His objective is to connect the seemingly unrelated fields of infant research and robotics, and understand the flexible frame-work of intelligence.
Takashi Omori
Takashi Omori completed the graduate program at the Graduate School of Engineering, University of Tokyo in 1980. He served as a lecturer from 1987, as an associate professor from 1988, and as a professor from 1998 in Tokyo University of Agriculture and Technology. He became a professor since May 2000 in the Graduate School of Engineering, Hokkaido University, and professor of Faculty of Engineering, Tamagawa University and Brain Research Institute of Tamagawa University from 2006. He is now a researcher of School of Humanity and Science, Nihon University. He started his research field from a self-organizing model of NN, and moved to more higher cognition process from vision, memory and development. His current interest is in a computational modeling of mental process in Human-Agent Interaction. He served as a president of Japanese Cognitive Science Society from 2015 to 2016, and Japanese Neural Network Society from 2017 to 2018.