

Abstract
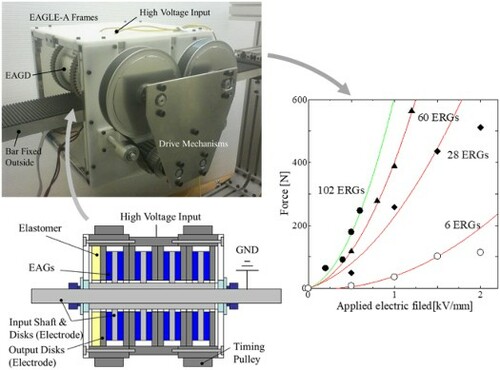
Actuators with clutch mechanisms have advantages in safety, backdriveability, and controllability for human-coexistence robots. This paper presents a large force actuator using electro-adhesive gels, which are functional materials controlled by the magnitude of an electric field. The developed actuator can generate and continuously control a force over 560 N and resist with a small force when de-energized. The number of electro-adhesive gel disks is drastically increased to increase the generative force. This paper reports the structural plan for the new actuator and experiments to investigate its basic characteristics. Based on the experimental results, an actuator model is identified for the future design of its control system. This paper contributes to the development of a clutch-type linear actuator with a large generative force, maintaining safety and a high force-to-weight ratio. It also addresses the problem of high-voltage power supply costs for electro-rheological and electro-adhesive materials.
GRAPHICAL ABSTRACT
Acknowledgments
We thank Robert A. Brewster, PhD, from Edanz (https://www.edanz.com/ac) for editing a draft of this manuscript.
Disclosure statement
No potential conflict of interest was reported by the authors.
Notes
1 Called an electro-rheological gel (ERG) in our earlier publications.
2 Called an electro-rheological gel linear actuator (ERGLA) in our earlier publications.
Additional information
Funding
Notes on contributors
Ken'ichi Koyanagi
Ken'ichi Koyanagi received his PhD in engineering from Osaka University in 2005. From 2001 to 2006, he was a Research Associate at Osaka University. Since 2006, he has been with the Toyama Prefectural University. Currently, he is a Professor in the Faculty of Engineering at the Toyama Prefectural University, Japan. His research interests include mechatronics, robotics and virtural realty technology applying functional materials.
Yudai Takata
Yudai Takata received his BS and MS in engineering from Toyama Prefectural University, Japan, in 2011 and 2013, respectively. After graduation, he worked at FUJIFILM Toyama Chemical Co., Ltd. and Mitsubishi Electric Co. Currently, he has been with Aisin Corporation.
Yasuhiro Kakinuma
Yasuhiro Kakinuma received the BE, ME and PhD degrees from Keio University in 2002, 2004 and 2006, respectively. From 2005 to 2007, he was a Research Associate at Keio University. Since 2008, he has been with the Department of System Design Engineering, Keio University, where he is currently working as a Professor. In 2012-2013, he was a Visiting Associate Professor with Institute of Production Engineering and Machine Tools (IFW), Leibniz University Hannover in Germany. His research interests include subtractive/additive manufacturing, machine tools, process monitoring and control, robot machining, functional materials, and their application.
Hidenobu Anzai
Hidenobu Anzai receives the BE degrees from Hachinohe Institute of Technology, Aomori, Japan in 1978. In 1994, he joined Fujikura Kasei Co., Ltd. He researches on development of functional materials and its applications.
Koji Sakurai
Koji Sakurai receives the BE degrees from Tokai University, Tokyo, Japan in 1983. In the same year, he joined Fujikura Kasei Co., Ltd. He is a member of SICE, SPSJ, RSJ, JSMS and CerSJ.
Toru Oshima
Toru Oshima is a Professor in the Faculty of Engineering at Toyama Prefectural University, Japan. He received his PhD in engineering from Tokyo Denki University in 1987. He worked as researcher at the Tokyo Metropolitan Prosthetic and Orthotic Research Institute from 1986 to 1990. Since 1990, he has been with the Toyama Prefectural University.