Figures & data
Table 1. Parameter set used in Schättler and Ledzewicz (Citation2015) for the corresponding finite horizon model.
Table 2. Parameter set for the infinite horizon model presented here
Figure 1. States for a sufficient large budget and initial state N(0) = (10, 10, 10).
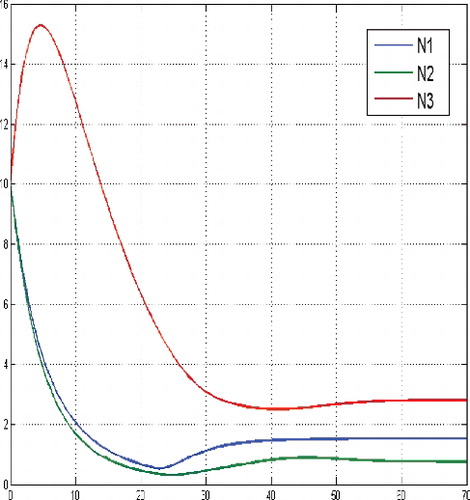
Figure 2. Controls for a sufficient large budget and initial state N(0) = (10, 10, 10).
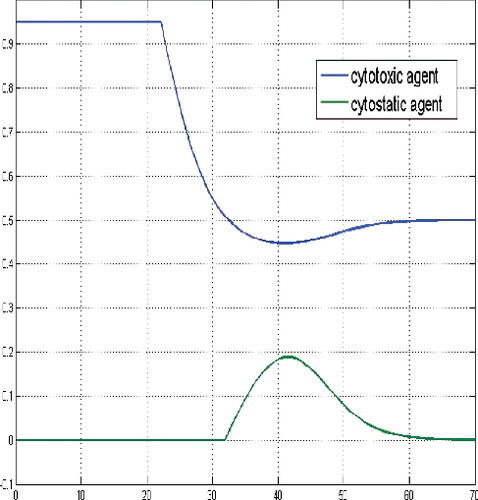
Figure 3. Adjoint functions for a sufficient large budget and initial state N(0) = (10, 10, 10).
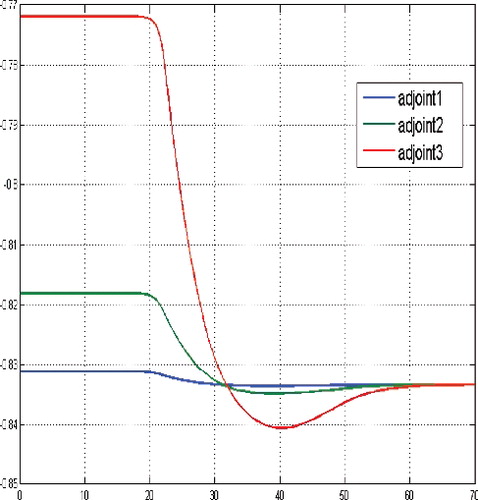
Figure 4. States for a sufficient large budget and large initial tumor cells population, i.e. N(0) = (30, 30, 30).
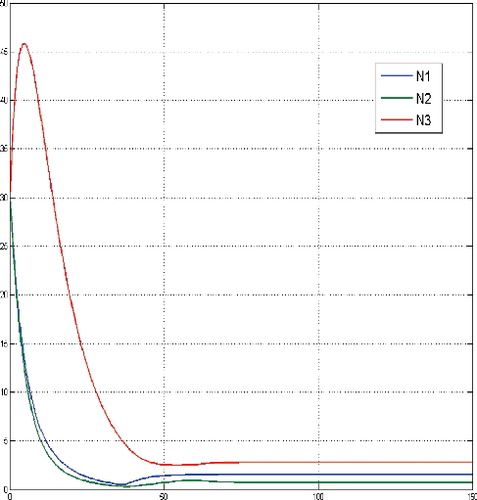
Figure 5. Controls for a sufficient large budget and large initial tumour cells population, i.e. N(0) = (30, 30, 30).
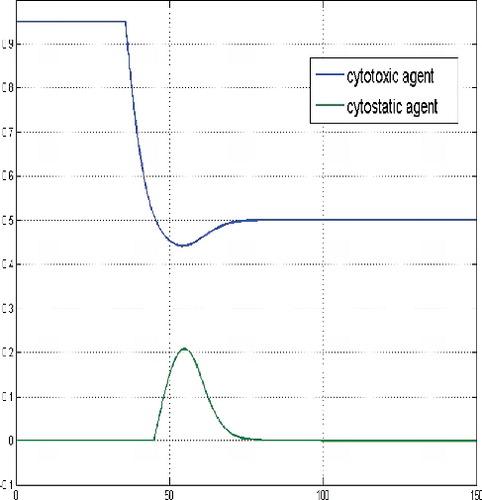
Figure 6. Adjoint functions for a sufficient large budget and large initial tumour cells population, i.e. N(0) = (30, 30, 30).
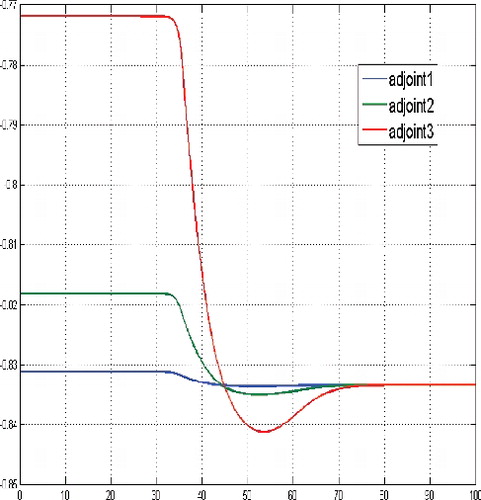
Figure 7. States for a sufficient large budget and N(0) = (1, 1, 1).
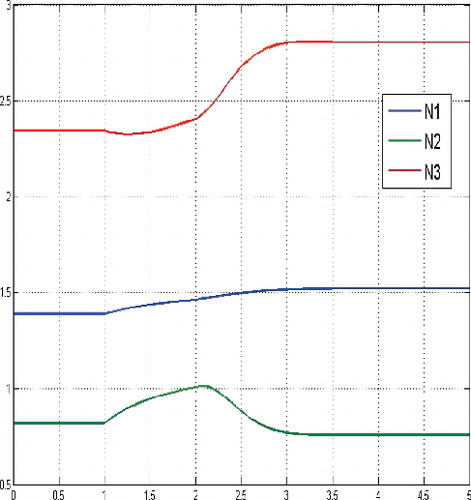
Figure 8. Controls for a sufficient large budget and N(0) = (1, 1, 1).
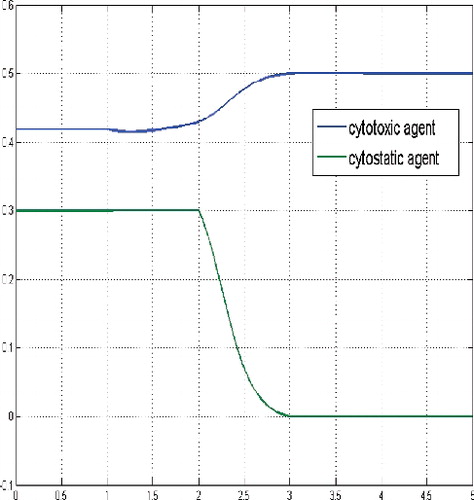
Figure 9. Adjoint functions for a sufficient large budget and N(0) = (1, 1, 1).
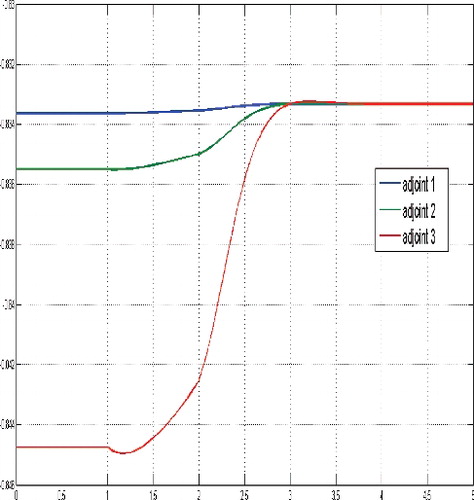
Figure 10. States for a sufficient large budget and initial state near the equilibrium level, here N(0) = (3, 3, 3).
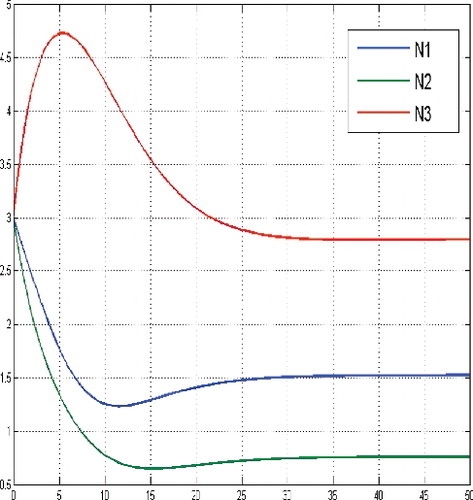
Figure 11. Controls for a sufficient large budget and and initial state near the equilibrium level, here N(0) = (3, 3, 3).
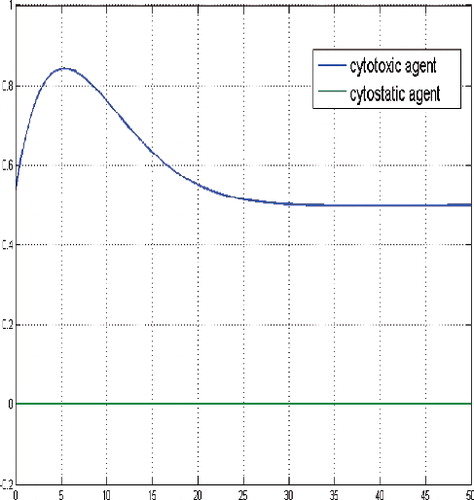
Figure 12. Adjoint functions for a sufficient large budget and and initial state near the equilibrium level, here N(0) = (3, 3, 3).
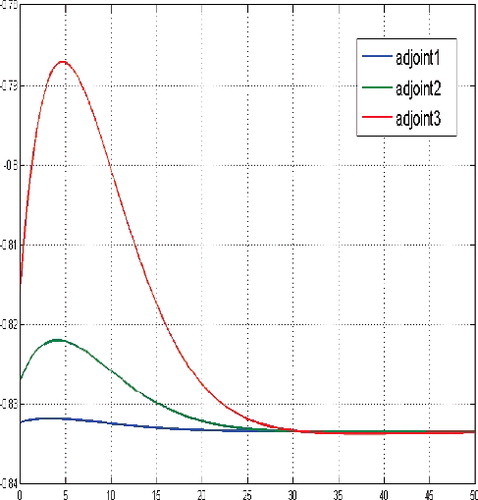
Figure 13. States for a sufficient large budget and a small tumour cells population relatively compared to the level of the equilibrium, N(0) = (0.3866, 0.1722, 0.4412).
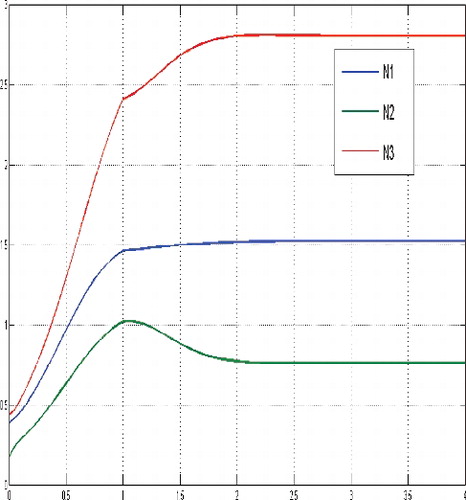
Figure 14. Controls for a sufficient large budget and a small tumour cells population relatively compared to the level of the equilibrium, N(0) = (0.3866, 0.1722, 0.4412).
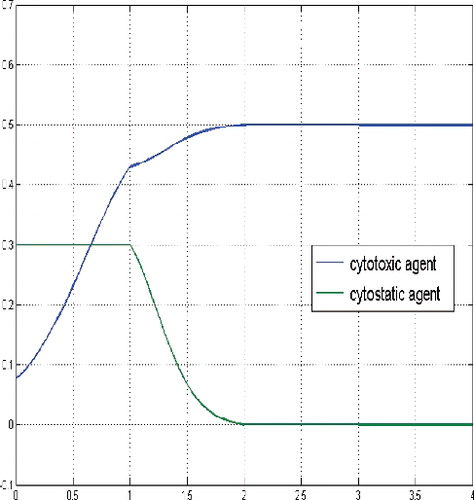
Figure 15. Adjoint functions for a sufficient large budget and a small tumor cells population relatively compared to the level of the equilibrium, N(0) = (0.3866, 0.1722, 0.4412).
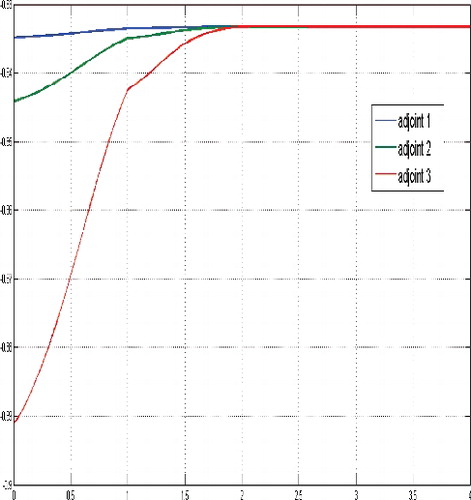
Figure 16. States for small budget d = 100 and N(0) = (10, 5, 10).
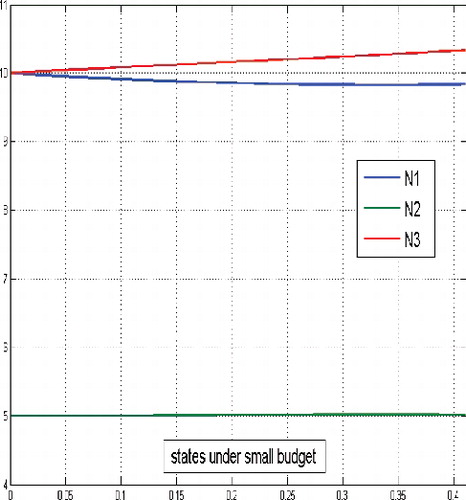
Figure 17. Controls for small budget d = 100 and N(0) = (10, 5, 10).
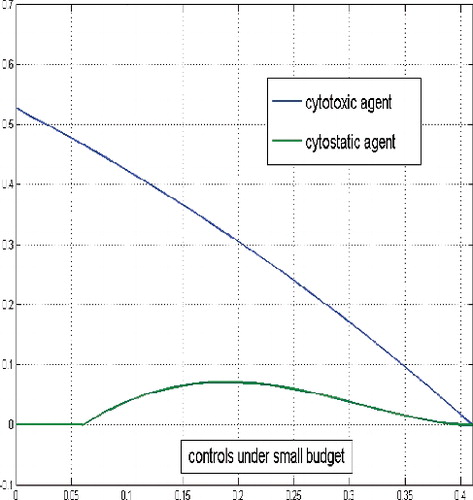
Figure 18. Costates for small budget d = 100 and N(0) = (10, 5, 10).
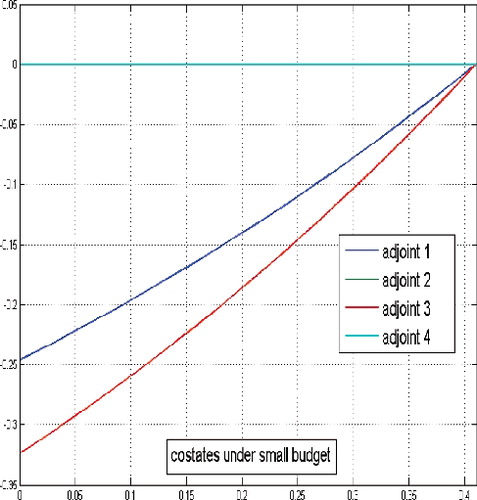
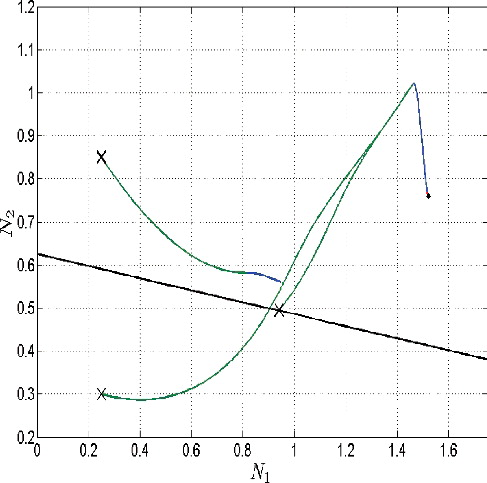
Figure 19. Phase diagram, slice plane (N 1,N 2), case of the threshold budget (long path), d=500.
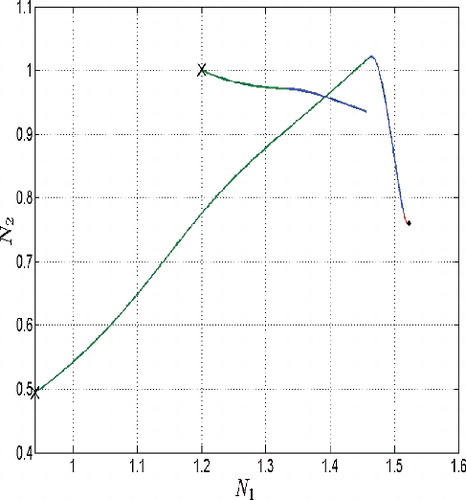
Figure 20. Phase diagram, slice plane (N 1,N 3), case of the threshold budget (long path), d = 500 (long path), d = 500.
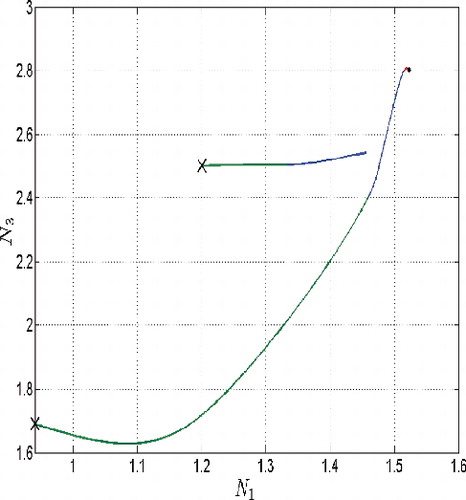
Figure 21. Phase diagra2, slice plane (N 1,N 3), case of the (long path), d = 500e threshold budget, d = 500.
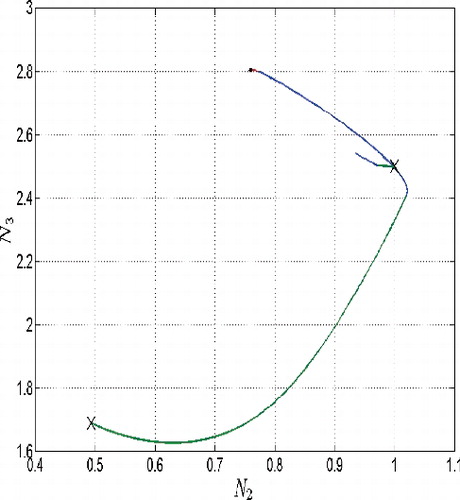
Figure 22. Phase diagram, slice plane (N 1,N 2), case of budget constraint which does not become active (shorter path going near by the equilibrium), d = 500.
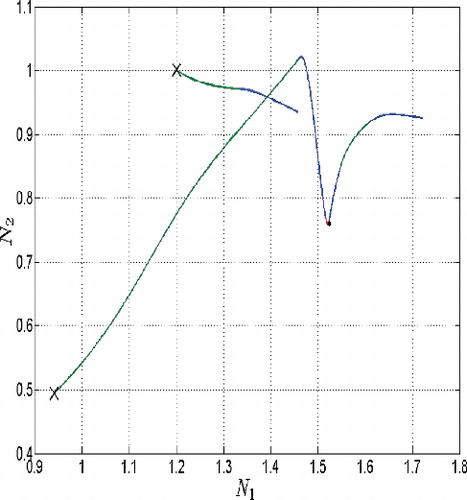
Figure 23. Phase diagram, slice plane (N 1,N 3), case of budget constraint which does not become active (shorter path going near by the equilibrium), d = 500.
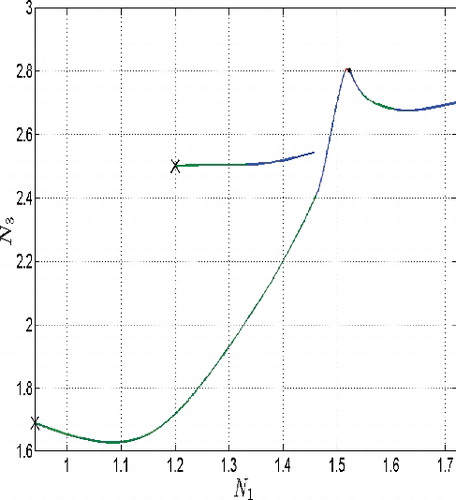
Figure 24. Phase diagram, slice plane (N 2,N 3), case of budget constraint which does not become active (shorter path going near by the equilibrium), d = 500.
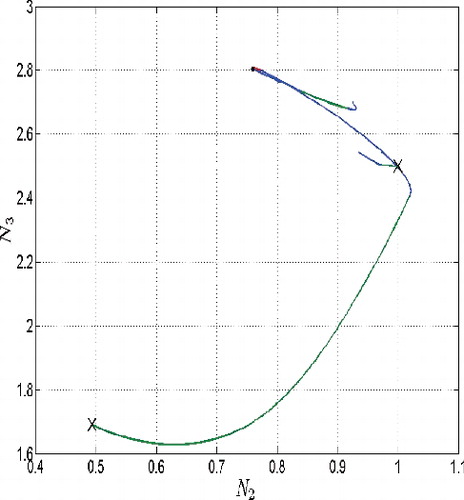
Figure 25. ‘Threshold state trajectories’ for budget d = 500.
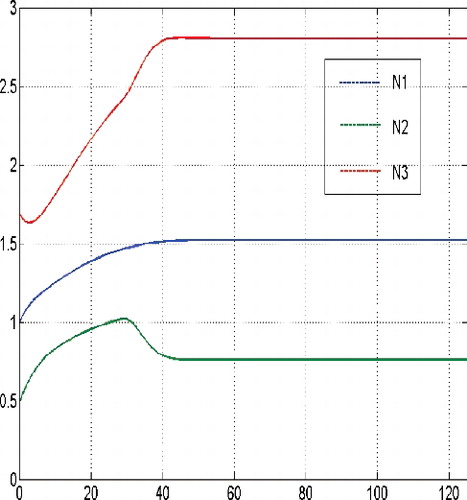
Figure 26. ‘Threshold state trajectories’ for budget d = 500.
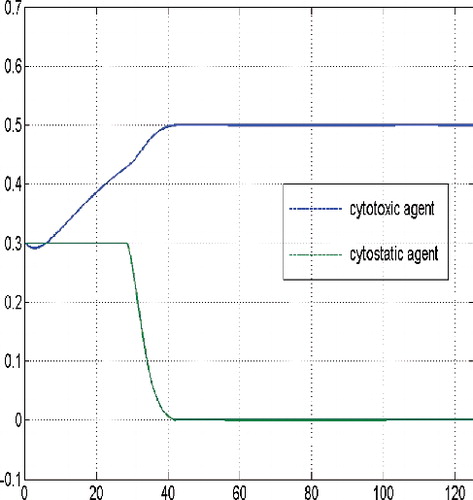
Figure 27. ‘Threshold adjoint functions’ for budget d = 500.
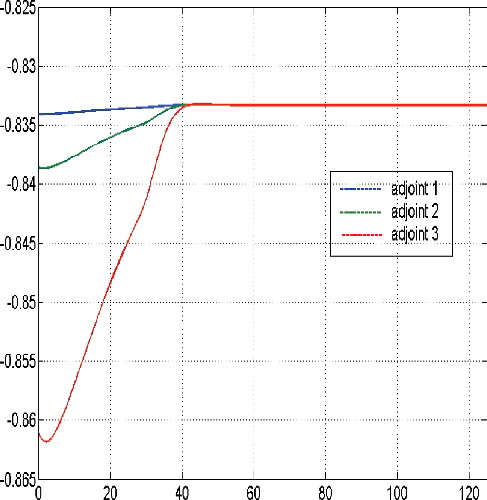
Figure 28. Growth of the budget variable N 4 for budget d = 500.
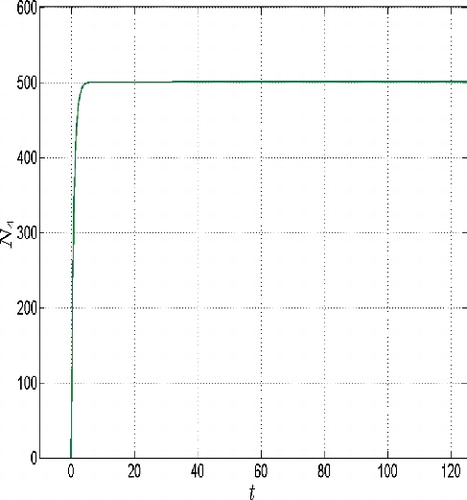
Figure 29. Slice curve for budget d = 500.