Figures & data
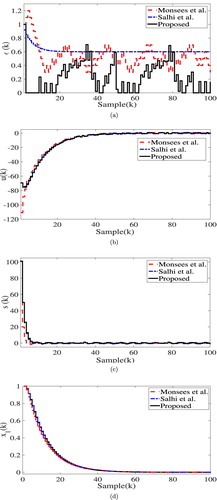
Figure 1. Possible conditions of adaptive sliding mode. (a) Case-1. (b) Case-2. (c) Case-3. (d) Case-4.
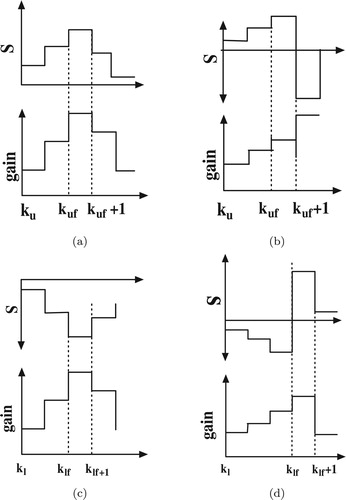
Figure 2. Free body diagram of mass–spring system.
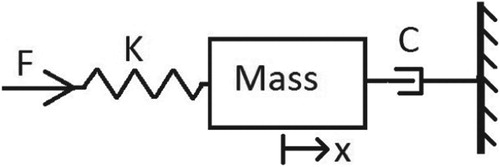
Figure 3. Simulation results of rectilinear plant. (a) Switching gain. (b) Control input. (c) Sliding function. (d) State .
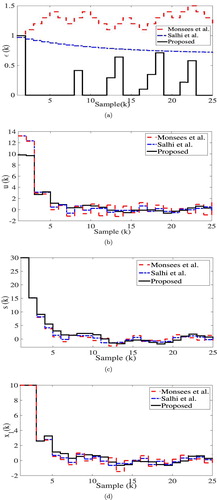
Table 1. Parameter values in simulation 1.
Table 2. Comparison of performance in simulation 1.
Table 3. Parameter values in simulation 2.
Figure 4. Simulation results of CNC milling machine. (a) Switching gain. (b) Control input. (c) Sliding function. (d) State .