Figures & data
Figure 1. Transformation of OP; Dotted and solid arrows represent approximated and exact transformations, respectively.
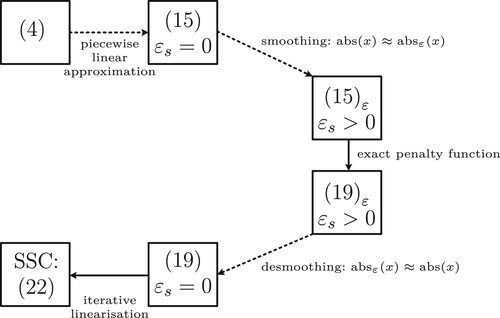
Figure 2. Space splitting. (a) Splitting of decision variable w into and
. (b) Absolute value constraint (Equation9b
(9b)
(9b) ) and its relaxed linearisation according to (Equation13a
(13a)
(13a) ). (c) Projection after optimisation with initially wrong sign; I: initial guess; O: optimum; P: projection of optimum.
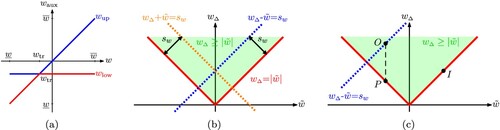
Figure 3. Approximation of nonlinearity with three-/five-segmented piecewise linear polynom
; Approximation error can be reduced with an increasing number of splitting segments.
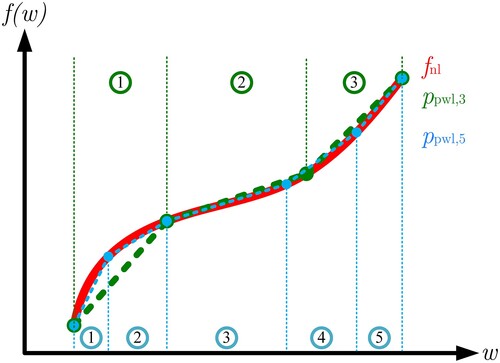
Figure 4. Space splitting convexification of zonally convex sets. (a) ZCS with a single transition point. (b) Shifted, rotated ZCS with a single transition point. (c) ZCS with shared line at transition.
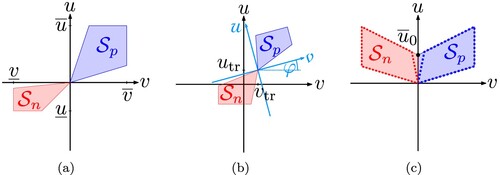
Figure 5. Space splitting convexification of piecewise linear equalities. (a) Nonlinearity with two linear segments. (b) Nonlinearity with three linear segments. (c) Splitting of state variable x for three segments.
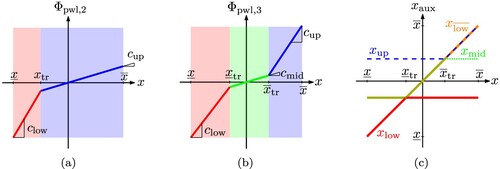
Figure 6. Model characteristics for hanging SMO with semi-active damper and nonlinear spring. (a) Hanging SMO model. (b) ZCS for semi-active damper force. (c) Piecewise linear spring force characteristic.
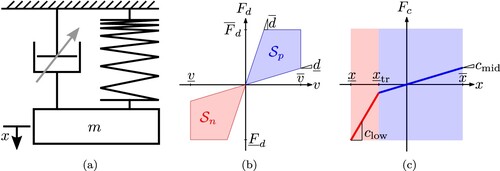
Table 1. Parameters for SMO application.
Table 2. Initial values of robustness analysis.
Table 3. Optimisation results of robustness analysis.
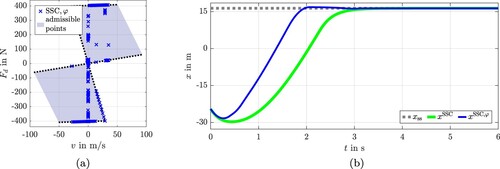
Figure 7. Solution of OPs with initial value and
collocation segments. (a) Piecewise linear spring force. (b) ZCS for damper force. (c) State and damper force trajectories.
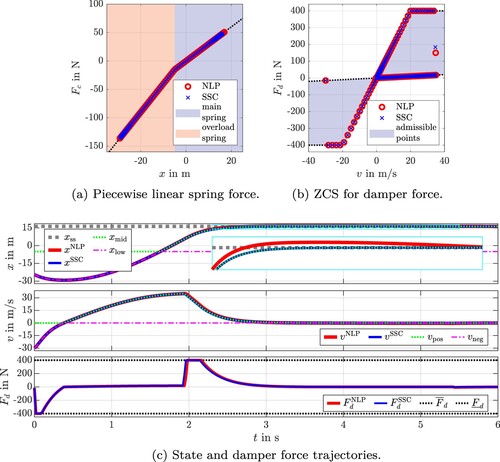
Figure 8. Optimisation results for SMO application with three-segmented nonlinear spring for . (a) Piecewise linear spring force with three segments. (b) ZCS for damper force.
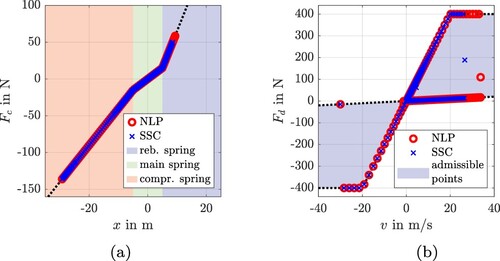
Table 4. Analysis of sensitivity regarding initial guess.
Figure 9. SSC optimisation results for SMO application with fully linear spring and rotated damper set. (a) Rotated ZCS for damper force. (b) Position trajectory; : original damper force set;
: rotated damper force set.