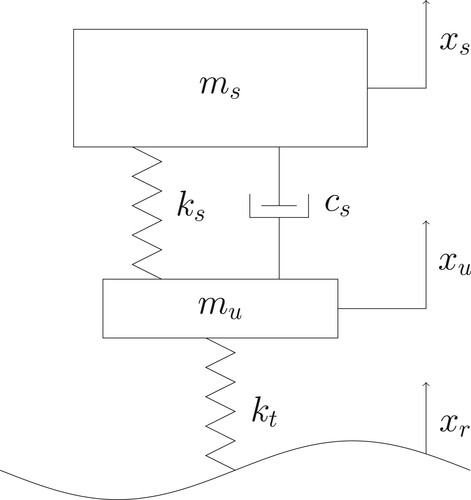
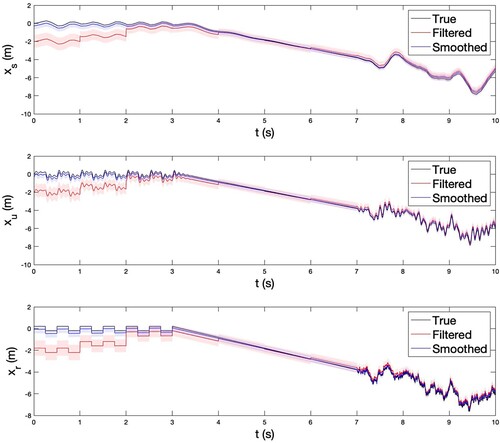
Figures & dataFigure 1. Quarter vehicle suspension model.Display full sizeTable 1. Sensor noise parameters.Display TableFigure 2. True, filtered and smoothed sprung and unsprung mass position states and road profile input.Display full size