
Figures & data
Table 1. Overview of control strategies described in the literature that (implicitly) take into account turning costs when using the A algorithm on a geometric graph.
Figure 1. Angles of rotation from orientation A to orientation B.
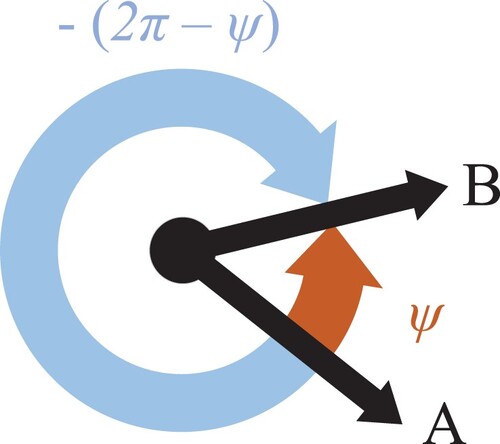
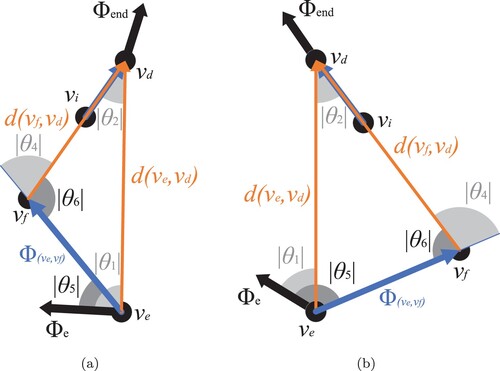
Figure 2. Graphic representation of the minimum absolute angles of rotation ,
, and
for vertex
with specified orientation
and destination vertex
with end orientation
. (a) One incoming edge at
. The minimum angles of rotation at
are equal to
and
. (b) One incoming edge at
. The minimum angles of rotation at
are equal to
and
, and (c) two incoming edges a and b at
.
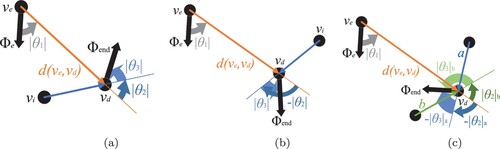
Figure 3. Layout shapes used in the comparative study. (a) Rectangular layout. (b) Hexagonal layout. (c) Arbitrary layout.
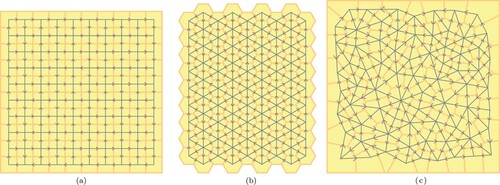
Figure 4. Example layouts with randomly 20% of the grid elements blocked. (a) Rectangular layout. (b) Hexagonal layout. (c) Arbitrary layout.
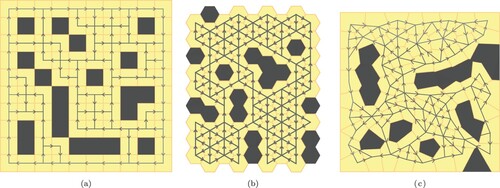
Figure 5. Average number of iterations needed to find one grid element of the lowest-cost path (i.e. path element), for different path lengths, for a rectangular grid with
of the grid elements blocked.
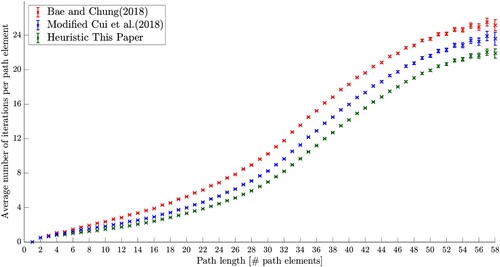
Table 2. Parameter values used for the computations.
Figure 6. Computed metrics for grids with different element shapes, for different percentages of grid elements blocked, and for different grid sizes. (a) Grid with rectangular elements, with of the grid elements blocked. (b) Grid with rectangular elements, with
of the grid elements blocked. (c) Grid with hexagonal elements, with
of the grid elements blocked. (d) Grid with hexagonal elements, with
of the grid elements blocked. (e) Grid with arbitrary-shaped elements, with
of the grid elements blocked. (f) Grid with arbitrary-shaped elements, with
of the grid elements blocked.
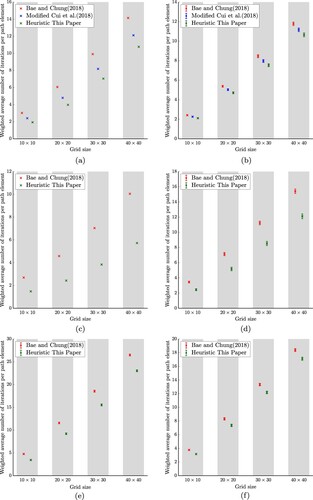
Figure 7. Average number of iterations needed to find one element of the lowest-cost path for different combinations of maximum (translation) speed and maximum rotation speed, for a rectangular grid with
of the grid elements blocked.
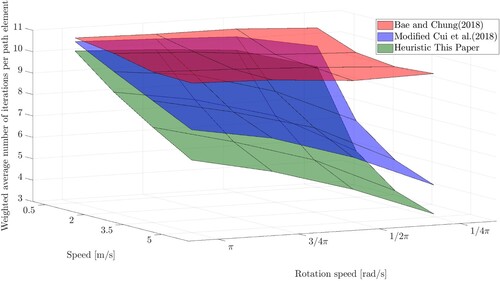
Table B1. Symbols and their meaning in Algorithms 1–3.
Figure A1. Minimum absolute angles of rotation ,
,
,
, and
. (a)
and (b)
.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.