Figures & data
Figure 1. Illustrations of collision avoidance conditions. (a) Illustration of Assumption 2.2 and the Conflict Zones (red boxes); (b) scheme of the SICA condition (Equation3(3)
(3) ):
shown as boxes around the vehicles and (c) conservativeness induced by rectangular outer approximations.
![Figure 1. Illustrations of collision avoidance conditions. (a) Illustration of Assumption 2.2 and the Conflict Zones (red boxes); (b) scheme of the SICA condition (Equation3(3) (xi(t),xj(t))∉B^r,ij={(xi,xj)|pi∈[pr,iin,pr,iout],pj∈[pr,jin,pr,jout]},(3) ): G^i(pi(t)) shown as boxes around the vehicles and (c) conservativeness induced by rectangular outer approximations.](/cms/asset/71cd6512-b03f-4d03-90ca-e4e897752f80/nvsd_a_1755446_f0001_oc.jpg)
Figure 2. Scenario for the performance evaluation.
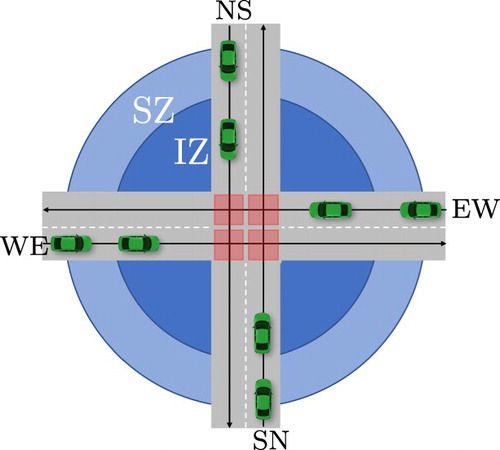
Table 1. General parameters.
Table 2. Vehicle parameters.
Figure 3. Components of the quadratic objective. T.L. denotes the traffic light controller.
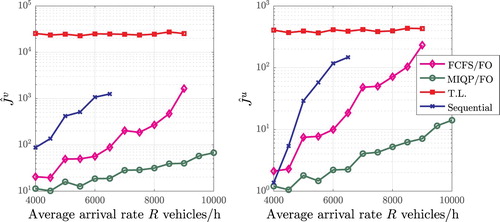
Figure 4. Energy cost of coordination: percentage increase (solid line, right axis); and CoC increase
(pale lines, left axis). Colour coding as in Figure .
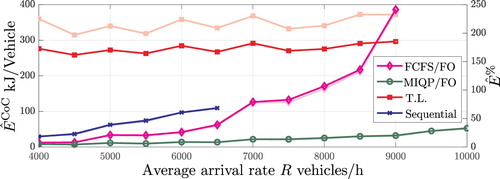
Figure 5. Travel time delay compared to the Overpass solution.
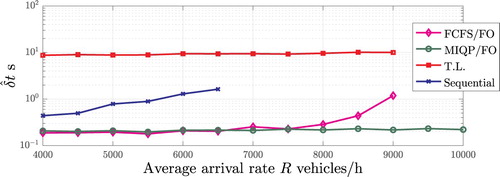
Figure 6. Estimate of the distribution of the observed for R = 6000 vehicles/h.
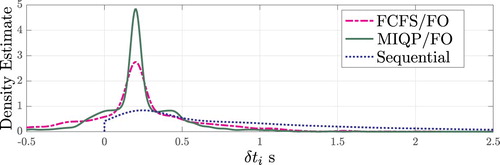
Figure 7. Average velocity (coloured lines) and velocity intervals (grey surface) in a scenario with R = 6000 vehicles/hour.
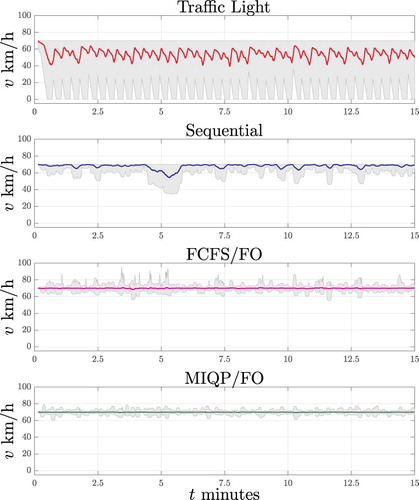
Figure 8. Position-velocity trajectories of one vehicle from the scenario with R = 6000 vehicles/hour. The grey bar corresponds to positions inside the intersection, 0 being the centre, whereas the grey line demarcates the beginning of the IZ.
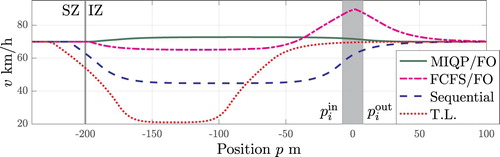
Figure 9. Speed profiles of Trucks (dark) and Cars (pale). The solid bars and the two vertical lines mark the intersection for Cars (dark) and Trucks (light) and the start of the SZ and IZ, respectively.
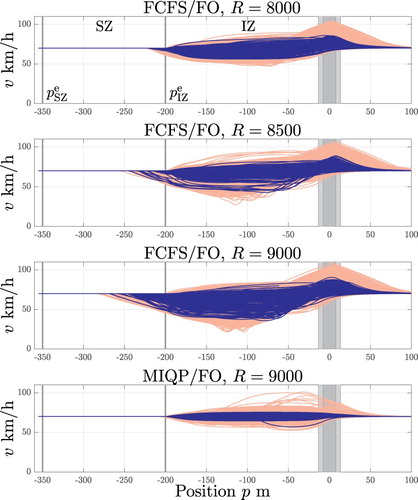
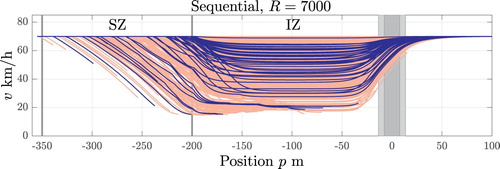
Figure 10. Velocity profiles for vehicles in the scenario with R = 7000, where the sequential controller failed. Colouring as in Figure .