

Abstract
This paper presents the real-time autonomous navigation of an electric wheelchair in a large-scale urban area. Accurate self-pose localization and well-chosen motion control are crucial for application to urban areas, as electric wheelchairs move on paved roads in dynamic environments and travel along sidewalks at a brisk speed. Our system is equipped with a localization module based on a 3D map and a path planning module based on a navigation map. However, the large-scale 3D map causes a high memory load, and the embedded PC can not deal with the map data. In addition, the large-scale navigation map increases the computational cost of path planning, which causes delays in navigation. To achieve real-time navigation independent of map size, we propose a 6-DoF pose localization switching reference 3D map and a two-step path planning framework. We ran tests by using an electric wheelchair on a real street in Tokyo and found that the proposed navigation system achieved autonomous navigation for over 8.8 km in about 133 minutes. The experimental results showed that the memory load was kept constant and the path planning was performed at high frequency, regardless of the size of the map or the distance to the destination.
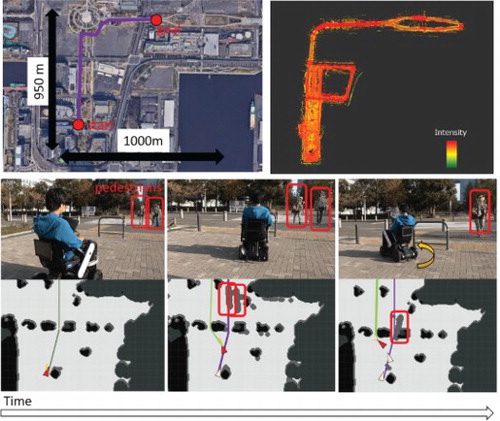
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
Notes
* Portions of this work were previously presented at the Robotics Symposia 2018, Toyama, Japan.
Additional information
Funding
Notes on contributors
Shun Niijima
Shun Niijima received the M.S degree in mechanical engineering from Tokyo University of Science, Chiba, Japan, in 2019. He is currently working toward the Ph.D. degree in the Department of Mechanical Engineering, Tokyo University of Science. He is a Research Fellow (DC1) of Japan Society for the Promotion of Science. His research interests include robot navigation, field robotics, and SLAM. He was the recipient of the young researcher fellow award of Japan Society of Mechanical Engineers in 2019. He is a member of the RSJ, IEEE and JSME.
Yoko Sasaki
Yoko Sasaki received her Ph.D degree in Mechanical Engineering at Tokyo University of Science for her research on auditory system for a mobile robot in 2009. She joined Digital Human Research Center, National Institute of Advanced Industrial Science and Technology(AIST). Since 2015, She is currently senior researcher of Artificial Intelligent Research Center, AIST. The work involves developing autonomous mobile robot and its sensing and navigation technology, especially in human living environment.
Hiroshi Mizoguchi
Hiroshi Mizoguchi is a Professor in the Department of Mechanical Engineering, Faculty of Science and Technology, Tokyo University of Science. He obtained his DE degree from the University of Tokyo, in 1985. From 1985 to 1994, he was with the R & D Center, Toshiba Corp. From 1994 to 1997, he worked at RCAST, University of Tokyo. In 1996, he had a chance to stay at Professor Roberto Cipolla's laboratory at the Department of Engineering, Cambridege University, UK, as an Academic Visitor supported by Monbusho's grant. From 1997 to 2002, he was an Associate Professor of the Department of Information and Computer Science, Faculty of Engineering, Saitama University. He is engaged in research on system of human interfaces in real world.He is a member of the Robotics Society of Japan, the Japan Society of Mechanical Engineers, and the IEEE Robotics and Automation Society.