

ABSTRACT
This paper presents a novel method to detect when a vehicle is changing lanes by considering individual driving styles. Some previous works have focused on the relation between lane changes and driving styles; however, the detection method of lane changes while considering driving styles is still not reported. The proposed method extracts a new feature to appropriately describe driving styles based on drivers' risk taking behavior when following the preceding vehicle. Based on the driving style of the target vehicle, performing a lane change is estimated at each time step. The determined driving style is used as input for the lane-change detection method based on the gap acceptance model, and it is integrated with the detection method based on vehicle movements. Experiments are used to demonstrate that the proposed method considerably improves detection performance.
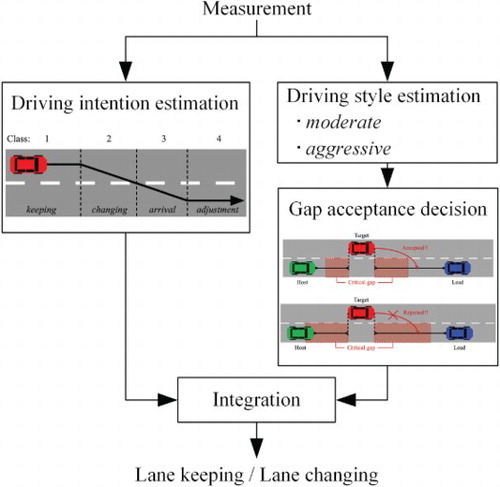
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Hanwool Woo http://orcid.org/0000-0002-8586-4304
Additional information
Notes on contributors
Hanwool Woo
Hanwool Woo received his B.S. degrees from the Department of Aeronautics and Astronautics, M.S. degree from the Department of Advanced Energy, the University of Tokyo, Japan in 2010. He was a Researcher in LG Electronics Korea from 2010 to 2014. His Ph.D. degree was from the Department of Precision Engineering, the University of Tokyo, Japan, in 2018. He was an Overseas Researcher under the Postdoctoral Fellowship of Japan Society for the Promotion of Science with the Department of Precision Engineering, The University of Tokyo, from 2018 to 2019. He is currently an Assistant Professor with the Department of Intelligent Mechatronics, Akita Prefectural University, Akita, Japan. His research interests cover autonomous vehicle, mobile robotics, and machine learning. He is a member of IEEE, JSME, RSJ, and JSAE.
Yonghoon Ji
Yonghoon Ji received the B.S. degrees in mechanical engineering and computer engineering from Kyung Hee University, Seoul, South Korea, in 2010, the M.S. degree in mechatronics from Korea University, Seoul, South Korea, in 2012, and the Ph.D. degree in precision engineering from The University of Tokyo, Tokyo, Japan, in 2016. He was an Overseas Researcher under the Postdoctoral Fellowship of Japan Society for the Promotion of Science with the Department of Precision Engineering, The University of Tokyo, from 2016 to 2018. He is currently an Assistant Professor with the Department of Precision Mechanics, Chuo University, Tokyo, Japan. His research interests cover mobile robotics, unmanned vehicle technologies, and underwater robotics. He is a member of IEEE, ICROS, KROS, RSJ, JSME, and SICE.
Yusuke Tamura
Yusuke Tamura received his B.E., M.E., and Ph.D. degrees in Engineering in 2003, 2005, and 2008 respectively from the University of Tokyo. From 2006 to 2008, he was a Research Fellow of the Japan Society for the Promotion of Science. He worked as a Project Researcher of the University of Tokyo from 2008 to 2012 and an Assistant Professor of Chuo University, Japan from 2012 to 2015. He is currently a Project Associate Professor in the Graduate School of Engineering, The University of Tokyo. His research interests include human-robot interaction, remote control technology, and sports engineering. He is a member of IEEE, JSME, and RSJ.
Yasuhide Kuroda
Yasuhide Kuroda received his B.E., M.E. degrees in Engineering in 1990, and 1992 respectively from Hiroshima University. From 1992, he has been a member of Technical Research Center at Mazda Motor Corporation. He has engaged in research work on advanced vehicle electric control system. From 2010 to 2013 he was a member of working group for ISO/IEC international standards for vehicle to grid communication interface. He was leading JSAE and JARI committee for this international standards. His research interests include V2X communication technologies, automated driving system. He is a member of JSAE.
Takashi Sugano
Takashi Sugano received his B.S. degrees from the Department of Mechanical Engineering, Tokyo University of Science, in 1993. He received his M.S. degrees from the Department of Naval Architecture and Ocean Engineering, the University of Tokyo, in 1996. He was an Engineer in Toshiba Corporation from 1996 to 2003. He worked at Toyota Communication Systems Co., Ltd from 2003 to 2005. He is currently a Researcher in Mazda Motor Corporation. His research interests are autonomous vehicle and vehicle dynamics control. He is a member of JSAE.
Yasunori Yamamoto
Yasunori Yamamoto received his B.S. degrees from the Department of Electrial & Ekectrnic Engineering, Ritsumeikan University, in 1988. He is currently a Research Manager Advances Human Research Field, Senior Principal Engineer. From 2014 to 2018, he is a SIP automatic driving system promotion committee system practicalization WG constitutive committee and ASV driving support design / communication utilization technology sub committee member. He is a member of JSAE , and JSME.
Atsushi Yamashita
Atsushi Yamashita received his B.E., M.E., and Ph.D. degrees from the Department of Precision Engineering, the University of Tokyo, in 1996, 1998, and 2001, respectively. From 1998 to 2001, he was a junior research associate in RIKEN (Institute of Physical and Chemical Research). From 2001 to 2008, he was an assistant professor of Shizuoka University. From 2006 to 2007, he was a visiting associate of California Institute of Technology. From 2008 to 2011, he was an associate professor of Shizuoka University. From 2011, he is an Associate Professor in the Department of Precision Engineering, the University of Tokyo. His research interests are robot vision, image processing, and intelligent sensing for robots. He is a member of ACM, IEEE, JSPE, RSJ, IEICE, JSME, IEEJ, IPSJ, ITE, and SICE.
Hajime Asama
Hajime Asama received M. S., and Dr. Eng. from the University of Tokyo (UTokyo) in 1984 and 1989. He worked at RIKEN, Japan from 1986 to 2002, became a professor of RACE of UTokyo in 2002, and a professor of School of Engineering of UTokyo since 2009. He received SICE System Integration Division System Integration Award for Academic Achievement in 2010, JSME Award (Technical Achievement) in 2018, etc. He was the vice-president of RSJ in 2011-2012, an AdCom member of IEEE Robotics & Automation Society in 2007-2009. Currently, he is the president-elect of IFAC since 2017, and the president of International Society for Intelligent Autonomous Systems since 2014. He is a member of Science Council of Japan from 2014 to 2017, and a council member since 2017. He is a Fellow of IEEE, JSME and RSJ.