

Abstract
We propose a control method in which an articulated wheeled mobile robot moves inside straight, curved and branched pipes. This control method allows the articulated wheeled mobile robot to inspect a larger area. The articulated wheeled mobile robot comprises pitch and yaw joints is and propelled by active wheels attached to the robot. Via the proposed control method, the robot takes on two different shapes; one prevents the robot from slipping inside straight pipes and the other allows movement in a pipe that curves in any direction. The robot is controlled by a simplified model for the robot's joint angles. The joint angles of the robot are obtained by fitting to a continuous curve along the pipe path. In addition, the angular velocity of the robot's active wheels is determined by a simplified model. The effectiveness of the proposed the control method was demonstrated with a physical implementation of the robot, and the robot was able to move inside straight, curved and branched pipes.
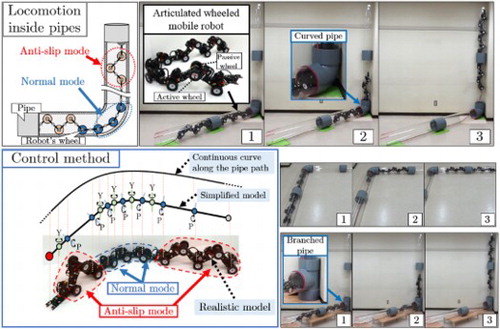
GRAPHICAL ABSTRACT
Keywords:
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Motoyasu Tanaka http://orcid.org/0000-0002-3717-8852
Kazuo Tanaka http://orcid.org/0000-0002-2830-9611
Additional information
Funding
Notes on contributors
Hidemasa Sawabe
Hidemasa Sawabe received the B.Eng. degree from the Department of Mechanical Engineering and Intelligent Systems, University of Electro-Communications, Tokyo, Japan in 2018. He is currently the M.Eng. candidate in the Department of Mechanical and Intelligent Systems Engineering, University of Electro-Communications. His research interests include the control of snake robots.
Mizuki Nakajima
Mizuki Nakajima received the B.Eng. and M.Eng. degrees in engineering from the Department of Mechanical Engineering and Intelligent Systems, University of Electro-Communications in 2014 and 2016, respectively. He is currently the Ph.D. candidate in the Department of Mechanical and Intelligent Systems Engineering, University of Electro-Communications. His research interests include the development and control of snake robots.
Motoyasu Tanaka
Motoyasu Tanaka received the B.Eng., M.Eng. and Ph.D. degrees in engineering from the Department of Mechanical Engineering and Intelligent Systems, University of Electro-Communications, Japan in 2005, 2007, and 2009, respectively. From 2009 to 2012, he was with Canon, Inc., Tokyo. He is currently an Associate Professor with the Department of Mechanical and Intelligent Systems Engineering, University of Electro-Communications. His research interests include biologically inspired robotics and dynamics-based nonlinear control. Dr. Tanaka is a recipient of the IEEE Robotics and Automation Society Japan Chapter Young Award from the IEEE Robotics and Automation Society Japan Chapter in 2006 and the Best Poster Award at SWARM2015: The First International Symposium on Swarm Behavior and Bio-Inspired Robotics in 2015.
Kazuo Tanaka
Kazuo Tanaka received the Ph.D. degree, in Systems Science from Tokyo Institute of Technology, in 1990. He is currently a Professor in Department of Mechanical and Intelligent Systems Engineering at The University of Electro-Communications, Tokyo, Japan. He is an IEEE Fellow and an IFSA Fellow. He was a Visiting Scientist in Computer Science at the University of North Carolina at Chapel Hill in 1992 and 1993. He received the Best Young Researchers Award from the Japan Society for Fuzzy Theory and Systems in 1990, the Outstanding Papers Award at the 1990 Annual NAFIPS Meeting in Toronto, Canada, in 1990, the Outstanding Papers Award at the Joint Hungarian-Japanese Symposium on Fuzzy Systems and Applications in Budapest, Hungary, in 1991, the Best Young Researchers Award from the Japan Society for Mechanical Engineers in 1994, the Outstanding Book Awards from the Japan Society for Fuzzy Theory and Systems in 1995, 1999 IFAC World Congress Best Poster Paper Prize in 1999, 2000 IEEE Transactions on Fuzzy Systems Outstanding Paper Award in 2000, the Best Paper Selection at 2005 American Control Conference in Portland, USA, in 2005, the Best Paper Award at 2013 IEEE International Conference on Control System, Computing and Engineering in Penang, Malaysia, in 2013, the Best Paper Finalist at 2013 International Conference on Fuzzy Theory and Its Applications, Taipei, Taiwan, in 2013, the Best Poster Award, The First International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2015), Kyoto, Japan, in 2015. His research interests include intelligent systems and control, nonlinear systems control, robotics, brain-machine interface and their applications. He served as Vice Chair of IEEE International Symposium on Intelligent Control (ISIC09) (in 2009 IEEE Multi-conference on Systems and Control), Saint Petersburg, Russia, in 2009. He served also as Chair of Task Forces on Fuzzy Control Theory and Application, IEEE Computational Intelligence Society Fuzzy Systems Technical Committee. He has served as an Associate Editor for Automatica and for the IEEE Transactions on Fuzzy Systems, and is on the IEEE Control Systems Society Conference Editorial Board.
Fumitoshi Matsuno
Fumitoshi Matsuno received the PhD (Dr. Eng.) degree from Osaka University in 1986. In 1986 he joined the Department of Control Engineering, Osaka University. Since 2009, he has been a Professor in the Department of Mechanical Engineering and Science, Kyoto University. His current research interests lie in robotics, swarm intelligence, control of distributed parameter system and nonlinear system, and rescue support system in disaster. Dr. Matsuno received many awards including the Outstanding Paper Award from the Institute of Systems, Control and Information Engineers (ISCIE) in 1986, the Outstanding Paper Award in 2001, 2006 and 2017, Takeda Memorial Prize in 2001 and Tomoda Memorial Prize in 2017 from the Society of Instrument and Control Engineers (SICE), the Prize for Academic Achievement from Japan Society of Mechanical Engineers (JSME) in 2009, the Best Paper Award in 2013 from Information Processing Society of Japan, the Best Paper Award in 2018 from the Robotics Society of Japan (RSJ) etc. He served as a General Chair of IEEE SSRR2011 and IEEE/SICE SII2011, SWARM2015, SWARM2017 etc. He is a Fellow member of the SICE, the JSME, the RSJ and a member of the IEEE among other organizations.