
Figures & data
Figure 1. Example of the input (non-schematized) and output (schematized) route map produced by the method described by Galvão et al. (Citation2020)
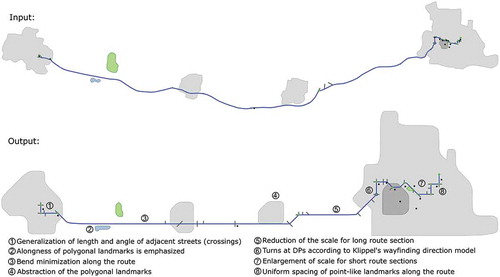
Table 1. Research questions and hypotheses
Table 2. Experimental tasks and main variables measured to test our hypotheses
Figure 2. Route 1 a) non-schematic vs b) schematic map type at initialization (lowest zoom level). Maps size was constantly 150 × 75 mm during the experiment. Label overlaps disappeared when participants zoomed in
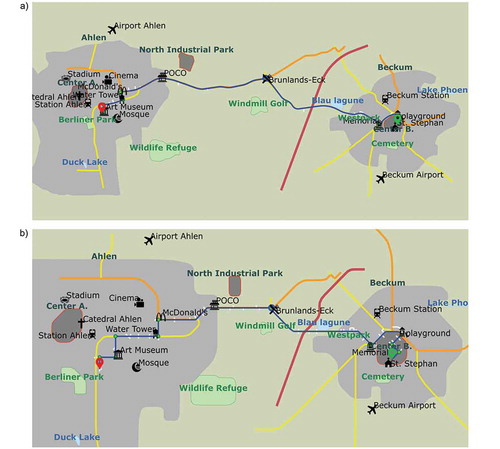
Figure 3. Route 2 a) non-schematic vs b) schematic map type at initialization (lowest zoom level). Maps size was constantly 75 × 150 mm during the experiment. Label overlaps disappeared when participants zoomed in
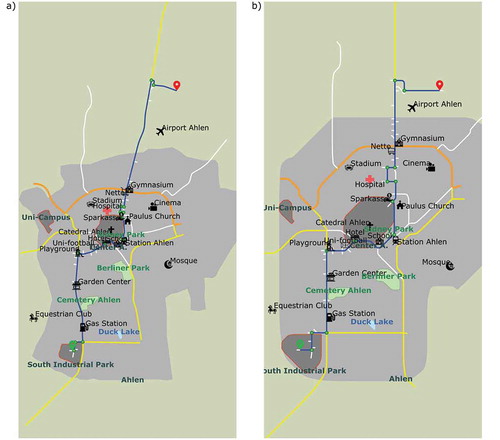
Figure 4. Route instruction ordering (RIO) web application interface. On the left, the interactive route map, on the right, the sortable list of instructions
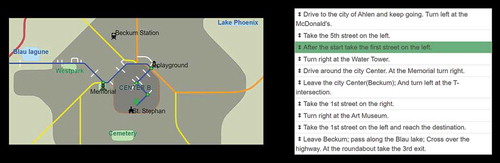
Figure 5. Situated route reading task implemented in the virtual-reality driving simulator: a) 3D city model created with CityEngine and SketchUp (here showing part of Route 2 from above). b) Hardware setup. c) A user navigating in the virtual environment while using the interactive map application on the tablet
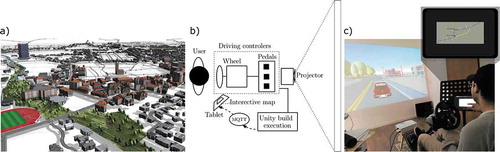
Figure 6. Examples of typical map view during the driving task: a) Route 1 type non-schematic (on the left) vs. b) Route 1 type schematic. The map dimension is fixed (150x75 mm) but participants can zoom and pan to a desired focus point. The maps are always north-oriented and rotations are not allowed. The yellow car icon indicates the driver’s virtual location on the route
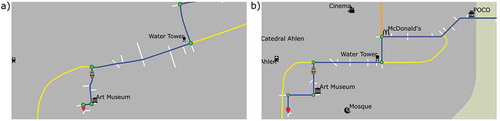
Figure 7. The landmark placement application interface for Route 1 type schematic. Only the landmarks recalled previously in the landmark recall test can be placed on the base map. For polygonal landmarks, the user first needed to drag and drop the landmark’s bounding box onto the desired position before seeing the polygon’s true shape
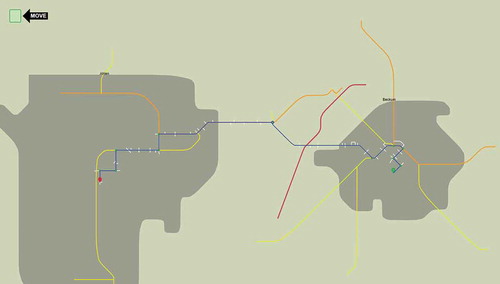
Table 3. Differences between the RIO task and the driving task: prospective vs. situated route reading
Figure 8. Experimental design and procedure. The experiment is composed of two tasks (RIO and driving) and two memory tests: a landmark recall and a landmark placement test. In this process diagram, the letter ”A” and ”B” is used to indicate two different routes, directions, or map types. For example, if ROUTE_A is the Route 1, then ROUTE_B is the Route 2; and if ROUTE_A is the Route 2, then ROUTE_B is the Route 1
Table 4. Descriptive map interaction statistics: mean (standard deviation)
Table 5. Descriptive statistics of landmarks’ visibility, correct recall, and correct placement: mean (standard deviation)
Figure 9. Recall of landmarks: a) After the RIO task, 44.6% of the map’s point-like landmarks were recalled by non-schematic map type users, while 48.9% by the schematic map type users. For polygonal landmarks, 36.6% by non-schematic users and 35.9% by schematic users. b) After the driving task, 43.4% of the map’s point-like landmarks were recalled by non-schematic map type users, while 50.9% by the schematic map type users. For polygonal landmarks, 20.4% by non-schematic users and 15.9% by schematic users. c) After the driving task, 7.1% of the point-like and 8.4% of the polygonal foils were (erroneously) recalled. After the RIO task, 4.9% of the point-like and 7.2% of the polygonal foils were (erroneously) recalled
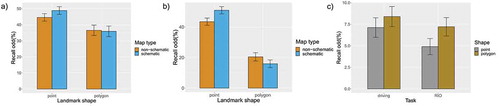
Figure 10. Topological subdivisions are formed by the street network and the city’s boundaries. a) Route 1 and b) Route 2
Figure 11. Topologically correct placement: Percentage of the correctly recalled global landmarks that were placed in the correct topological region, aggregated by the map type. Excluding responses for which participants reported 0% of confidence
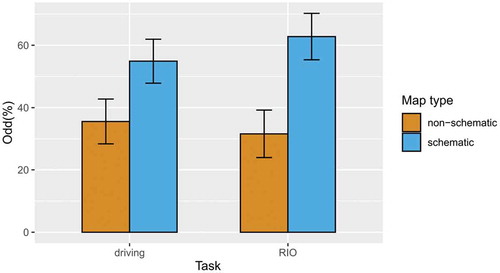
Table 6. Confirmation of hypotheses summary
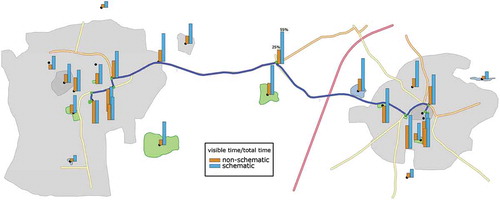
Figure 12. The difference in the landmarks’ relative visibility between non-schematic (orange) and schematic (blue) map type in the driving task for Route 1 (similar results were found for Route 2 and in the RIO task). The bars show each landmark’s mean visible time divided by the map use time, calculated as . Where
is map use time, and
is the time for which the given landmark
was present within the map’s viewport
Data availability
The data that support the findings of this study are openly available in OSF at DOI 10.17605/OSF.IO/JV9WF.