Figures & data
Figure 1. The location of the study area: (a) map of South Korea; (b) map of Seoul and the location of Mt. Umyeon; (c) aerial image of Mt. Umyeon in 2011.
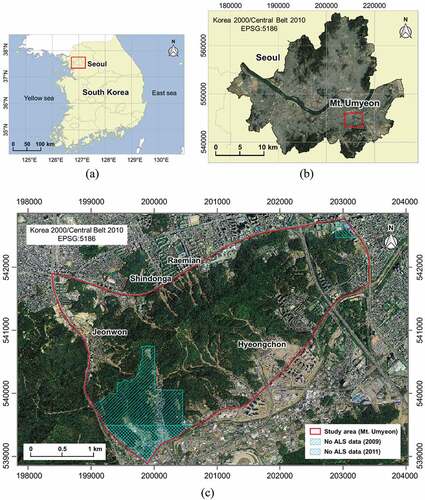
Table 1. Basic information about ALS data used in the study.
Figure 2. LiDAR data in the study area: (a) raw point cloud of 2009; (b) raw point cloud of 2011; (c) filtered points of 2009; (d) filtered points of 2011; (e) TIN model of 2009; (f) TIN model of 2011; (g) 1-m DEM of 2009; (f) 1-m DEM of 2011.
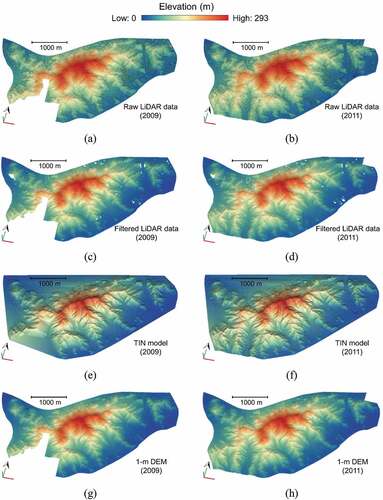
Figure 3. The spatial distribution of DoD in the study area.
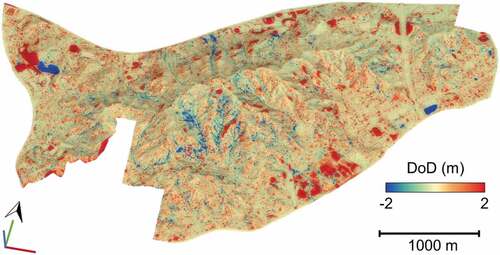
Figure 4. GNSS measurements in the study area: (a) the locations of the GNSS measurements overlayed on the point cloud; (b) boxplot of the elevation differences between GNSS measurements and LiDAR observations; (c) the elevation differences between GNSS measurements and LiDAR observations.
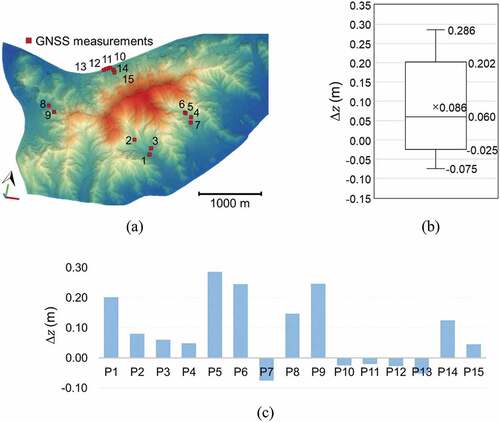
Figure 5. Vertical accuracy assessment by using stable terrain measurements: (a) location of road segments; (b) Box-and-whiskers plots representing the distribution of elevation differences of each road segment and the total.
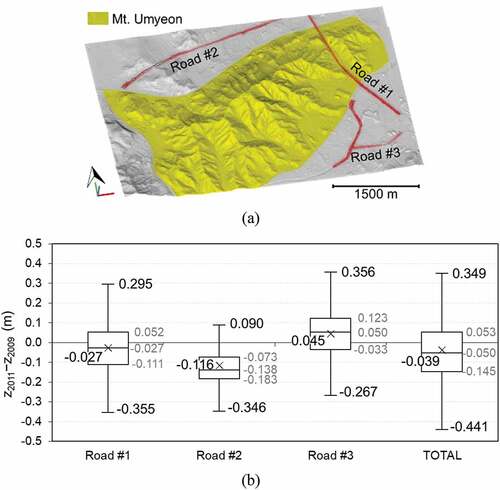
Figure 6. Spatial distribution of estimated error in the study area: (a) estimated error in the DEM of 2009; (b) estimated error in the DEM of 2011; (c) estimated error of DoD.
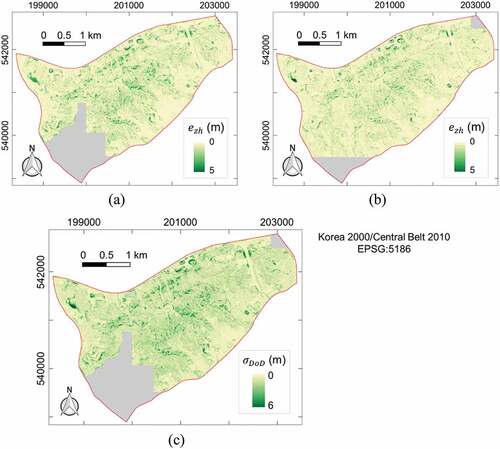
Figure 7. The probability calculated from DoD with uniformly distributed DEM error: (a) spatial distribution of t-score; (b) spatial distribution of the converted probability; (c) thresholded DoD with 68% confidence interval of the t-distribution; (d) thresholded DoD with 95% confidence interval of the t-distribution.
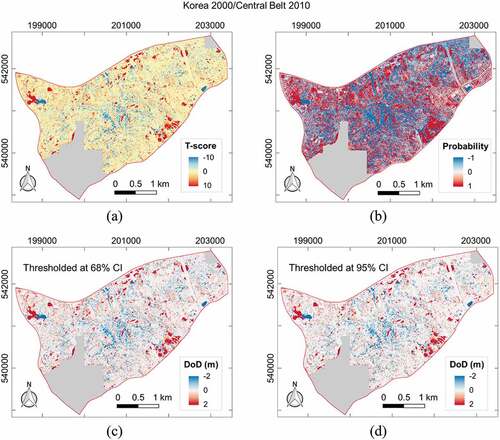
Figure 8. The probability updated by Bayes Theorem with uniformly distributed uncertainty: (a) the probability revealed from spatial index analysis; (b) the conditional posterior probability; (c) thresholded DoD with 68% confidence interval; (d) thresholded DoD with 95% confidence interval.
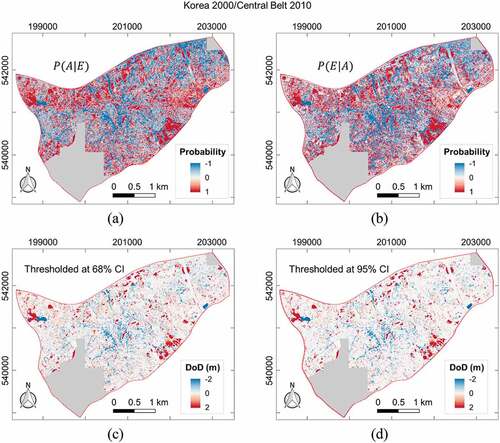
Figure 9. The probability calculated from DoD with spatially distributed DEM error: (a) spatial distribution of t-score; (b) spatial distribution of the converted probability; (c) thresholded DoD with 68% confidence interval of the t-distribution; (d) thresholded DoD with 95% confidence interval of the t-distribution.
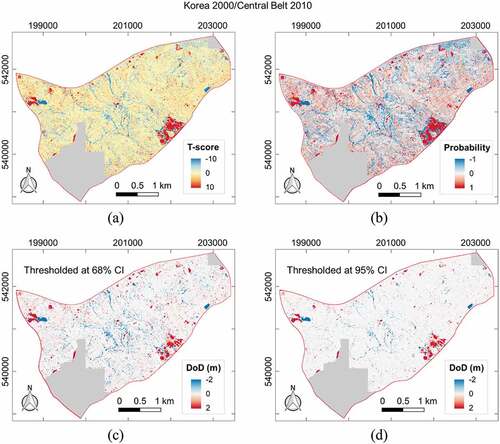
Figure 10. The probability updated by Bayes Theorem with spatially distributed uncertainty: (a) the probability revealed from spatial index analysis; (b) the conditional posterior probability; (c) thresholded DoD with 68% confidence interval; (d) thresholded DoD with 95% confidence interval.
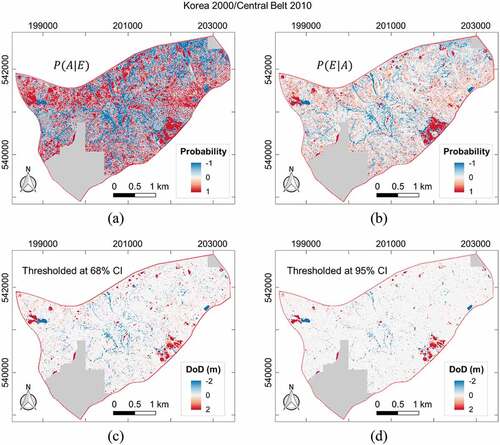
Table 2. Volumetric changes over whole study area.
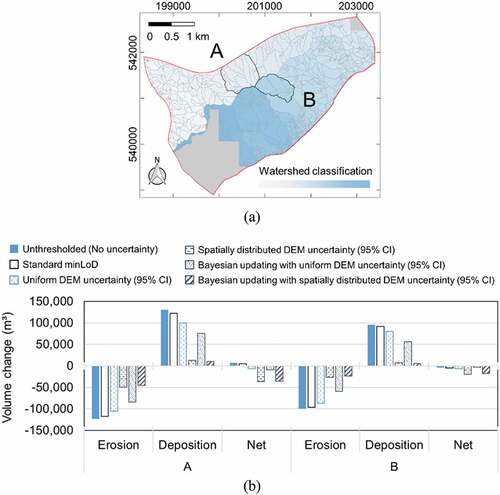
Table 3. Volumetric changes of small-scale watershed areas, A and B.
Figure 11. Volumetric changes in small-scale areas, A and B: (a) The location of selected areas; (b) Graph with different thresholding criteria.