Figures & data
Figure 1. Author’s interpretation of balance between human involvement and machine intelligence to realise a substantively augmented human. The theoretical optimal level of machine intelligence and human involvement is shaded blue. Insufficient machine intelligence, as observed in contemporary exoskeletons, does not enable a sufficient level of adaptation between user, task and environment.
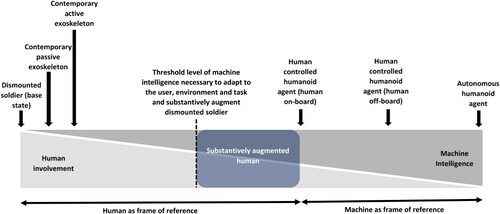
Figure 2. Theoretical one dimensional framework for current exoskeletons that are constrained due to the device only receiving information on the user and not receiving information about the environment or action. Shown here is that the device influences the user, and the user completes the action. More advanced algorithms for controlling exoskeletons include some feedback from the user to the device.
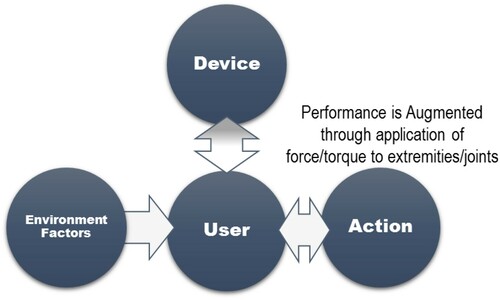
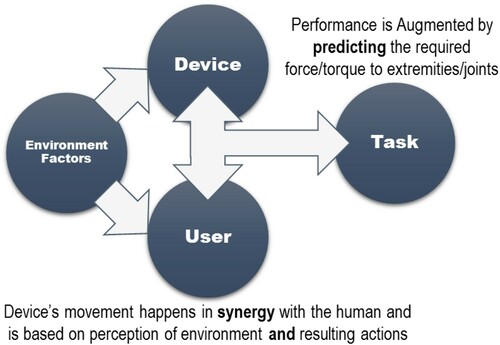
Figure 3. Proposed multi-dimensional interaction based framework to successfully field exoskeletons in a military context. Successful adoption of an exoskeleton depends on the concurrent integration of multiple elements including user, exoskeleton, task, and environment. In this framework, the exoskeleton receives information on the task, the user and the environment, and more importantly predicts future requirements. We envision future control algorithms will need to incorporate a way for the device to perceive the environment as well as the user’s response to environmental stimuli.