Figures & data
Figure 1. Two examples are shown for Equations (Equation20(20)
(20) ) and (Equation21
(21)
(21) ) with parameter values
,
and
. In both cases
and Theorem 4.1 implies the existence of a globally stable positive equilibrium with a semelparous trait component. (a) b = 5: four typical orbits in the x, u-phase plane are seen to approach the equilibrium
, and the adaptive landscape
has a global maximum at u = 0. (b) b = 40: four typical orbits x, u-phase plane are seen to approach a positive equilibrium
and the adaptive landscape
has a local minimum at u = 0.
![Figure 1. Two examples are shown for Equations (Equation20(20) x(t+1)=[(bsn−sa)exp(−w0u2(t))+sa]x(t)1+c0x(t)(20) ) and (Equation21(21) u(t+1)=(1−2w0σ2(bsn−sa)exp(−w0u2(t))(bsn−sa)exp(−w0u2(t))+sa)u(t).(21) ) with parameter values w0=5, w1=5.5, c0=1, sa=0.25, sn=0.5, and σ2=0.01. In both cases b>b0=1/sn=2 and Theorem 4.1 implies the existence of a globally stable positive equilibrium with a semelparous trait component. (a) b = 5: four typical orbits in the x, u-phase plane are seen to approach the equilibrium (x,u)=(1.5,0), and the adaptive landscape L(v) has a global maximum at u = 0. (b) b = 40: four typical orbits x, u-phase plane are seen to approach a positive equilibrium (x,u)=(19.0,0), and the adaptive landscape L(v) has a local minimum at u = 0.](/cms/asset/46b2447d-f6d1-4e8f-ab20-926938b2b40d/tjbd_a_1858196_f0001_ob.jpg)
Figure 2. Shown are selected time snapshots of the adaptive landscape for the simulation in Figure (b) for the orbit with initial condition . The trait component
moves to the left towards the peak (not easily perceptible on the scale shown), but asymptotically arrives at a local minimum on the equilibrium landscape (shown in Figure (b)).
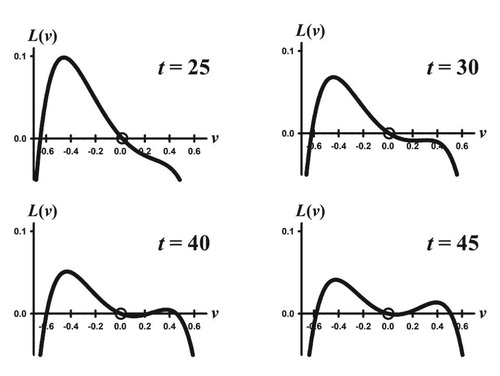
Figure 3. Two phase plane orbits are shown for the Darwinian model (Equation5(5)
(5) )–(Equation6
(6)
(6) )–(Equation23
(23)
(23) ) with parameters values
Note that
and hence the extinction equilibrium
is unstable. The orbit with initial condition
approaches the positive equilibrium
(open square), which is the bifurcating equilibrium from the extinction equilibrium
predicted by Theorem 4.2. The orbit with initial condition
approaches a different equilibrium, namely.
(open square). Both equilibrium trait values lie on global maxima of their respective adaptive landscapes
(open squares) and hence are ESS traits.
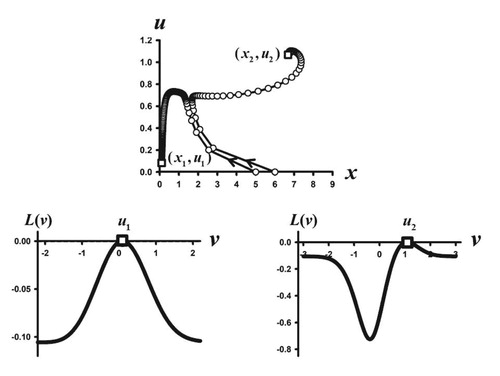
Figure 4. Two phase plane orbits are shown for the Darwinian model (Equation5(5)
(5) )–(Equation6
(6)
(6) )–(Equation23
(23)
(23) ) with the same parameters values as in Figure 3 except that b has been changed to b = 3.2. Since
the extinction equilibrium
is stable, as is illustrated by the orbit with initial condition
. However, the orbit with initial condition
approaches a positive equilibrium
, whose trait component is an ESS as the accompanying graph of the adaptive landscape
shows.
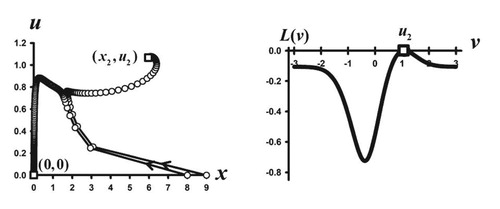
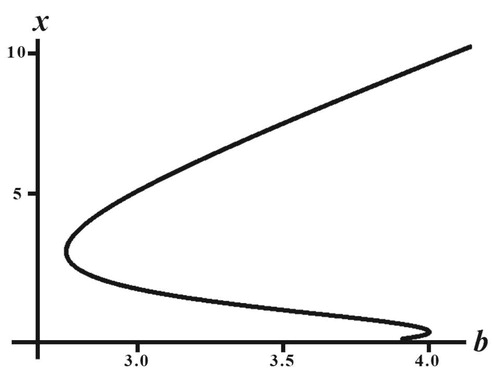
Figure 5. Shown is a plot of the Equation (Equation24(24)
(24) ) in the
-plane with parameter values used in Figures and and