
Figures & data
Figure 1. RGB-D 3D feature data base (left); Velodyne LiDAR of the same environment; alignment of LiDAR and RGB-D feature database.
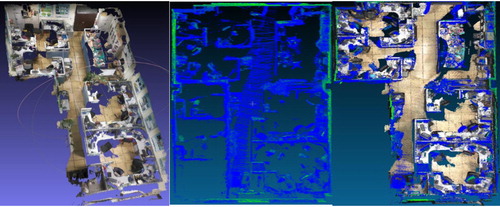
Figure 2. RGB-D 3D feature database closely aligned with Rigel vz1000 terrestrial LiDAR point cloud.
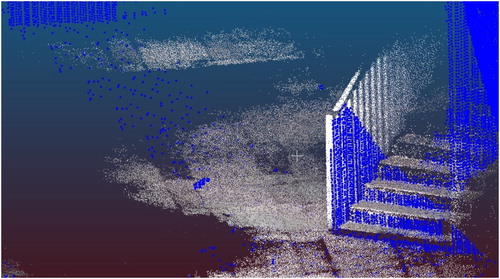
Figure 3. Point cloud registration error between RGB-D and LiDAR.
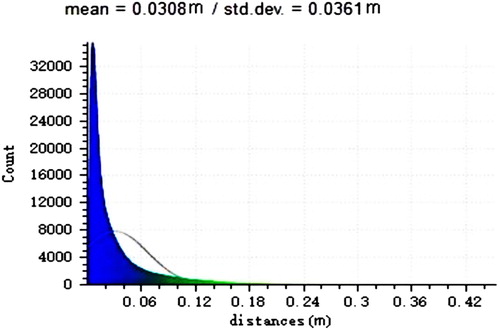
Figure 4. Proposed camera localization framework.
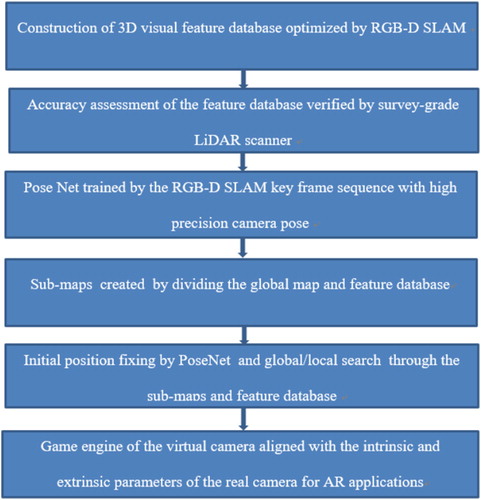
Figure 5. 3D dense point cloud (left); an example frame (middle); the sparse 3D feature database (right).

Figure 6. Camera position accuracy for one frame.
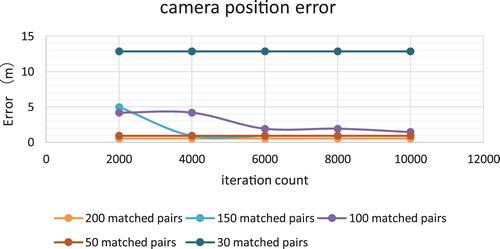
Figure 7. Camera localization error from the original image set used for constructing the 3D feature database.
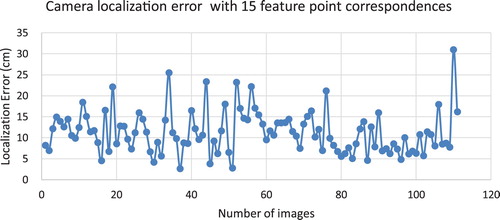
Figure 8. Camera localization error from an independent image set in the same area.
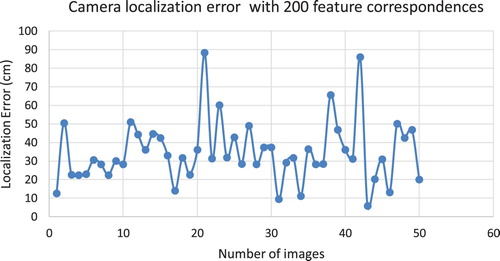
Figure 9. Office examples.

Figure 10. Corridor examples.

Figure 11. Office testing frames (left, 3.4 × 3 m) and corridor testing frames (right, 57 × 40 m).
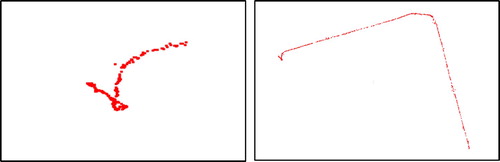
Table 1. Dataset details and results.
Table 2. Position error for all datasets.
Figure 12. Position errors for the Office1 dataset.
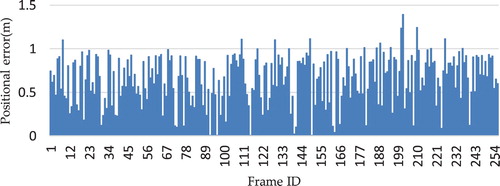
Figure 13. Position errors for the Playground dataset.
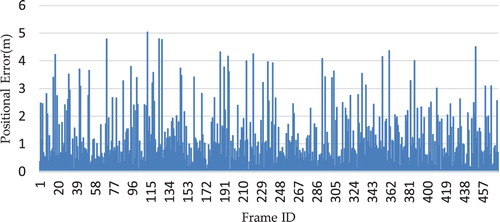
Figure 14. AR overlay with 66 cm error (left), 8 cm error (middle), 1 cm error (right).

Figure 15. AR overlay in the irrlicht 3D game engine.

Figure 16. AR fire overlay after the real and virtual camera alignment.
