
Figures & data
Figure 1. Architecture of the developed monocular visual SLAM system.
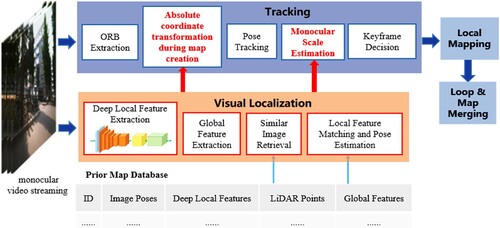
Figure 2. Workflow of building prior map using LiDAR SLAM method.
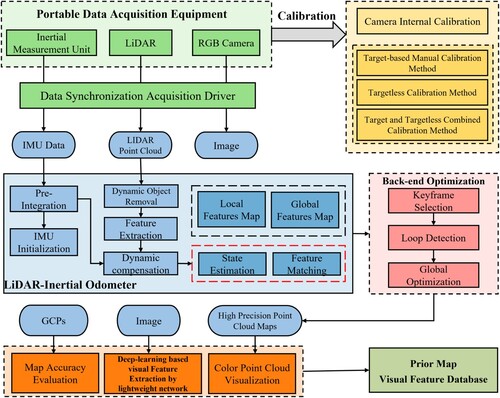
Table 1. Sensor devices used in the experiments.
Figure 3. Handheld data acquisition device with LIDAR and RGB camera combination.
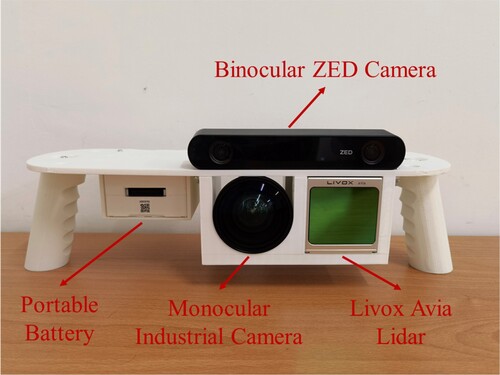
Figure 4. Diagram of the calibration effect of the three methods.
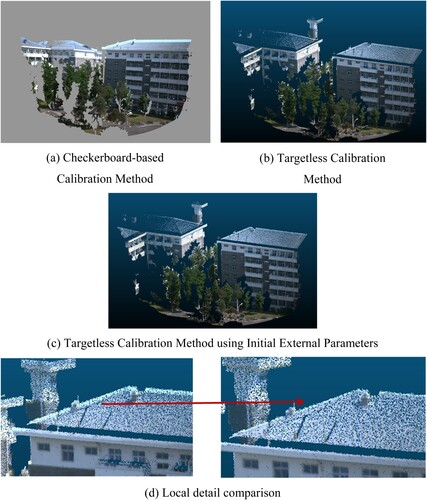
Table 2. Accuracy and time efficiency of calibration results.
Figure 5. Experimental site for data acquisition.

Figure 6. Colored LiDAR prior map.

Table 3. Geometric accuracy of the prior map.
Figure 7. Comparison of feature matching effects under the condition of rapid illumination changes.
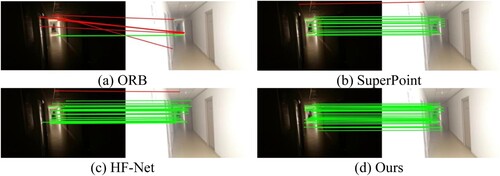
Figure 8. Comparison of feature matching effects under the condition of weak texture.
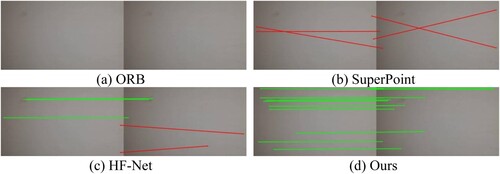
Figure 9. Comparison of feature matching effects under the condition of repeated texture.
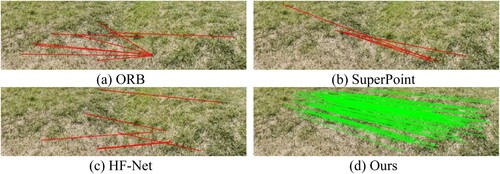
Table 4. Evaluation results of localization recall for HKRobot camera and ZED camera.
Table 5. Evaluation results of localization accuracy for HKRobot camera.
Figure 10. Result of SLAM.
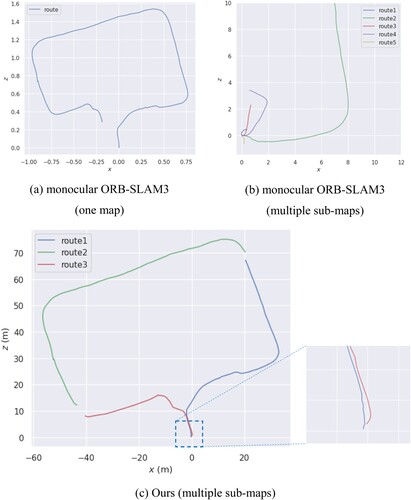
Table 6. Evaluation results of SLAM.
Data availability statement
Due to the nature of this research, participants of this study did not agree for their data to be shared publicly, so supporting data is not available.