
Figures & data
Figure 1. Research schematic describing multi-scale path planning for large-scale scenes.
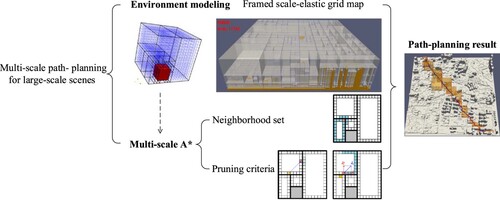
Table 1. Symbols and descriptions.
Figure 2. Illustration of 2D spatial division and identification based on the scale-elastic discrete grid structure. and
denote the subdivision levels in the two directions, while
and
represent coordinates under different subdivision levels. The gray area in the figures depicts the range of grid identification, and corresponding numbers indicate the coordinates of the grid. (a)
,
(b)
,
(c)
,
(d)
,
(e)
,
(f)
,
.
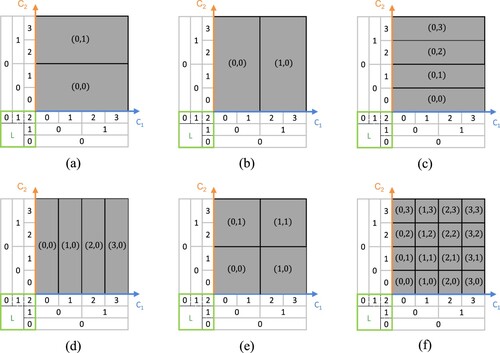
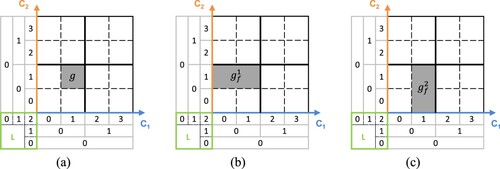
Figure 3. Parent grids in different directions. The gray grids in (b) and (c) are the parent grids of the gray grid in (a) in the and
axis directions, respectively. (a)
(b)
(c)
.
Table
Figure 4. Illustration of grid-set aggregation.
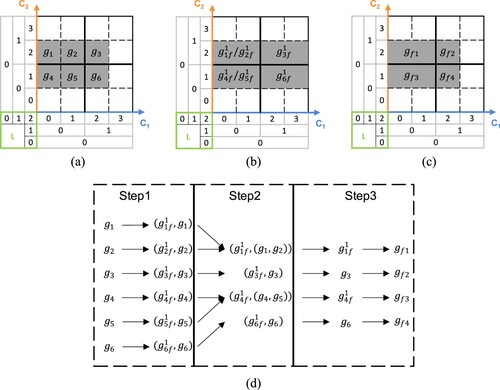
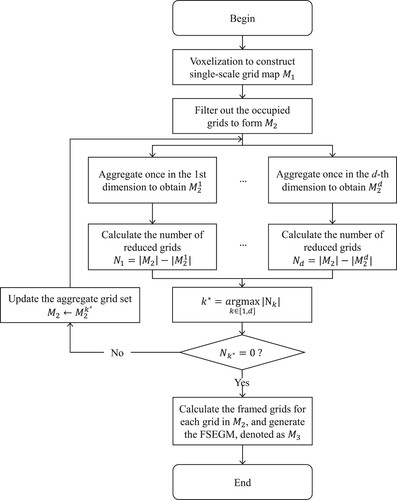
Figure 5. Flow chart for construction of framed scale-elastic grid map (FSEGM).
Table
Figure 6. Various grid maps of the same environment. The blue and red grids represent barrier-free and barrier areas, respectively. (a) example scenario (b) single-scale grid map (c) framed-octree grid map (d) FSEGM.
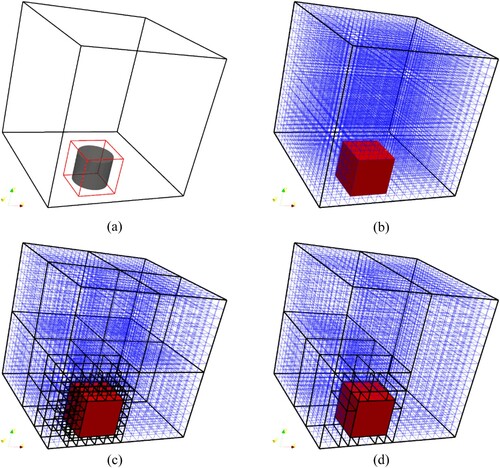
Figure 7. Different types of neighborhoods in a 2D environment.
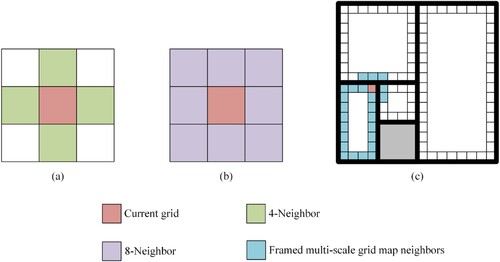
Figure 8. Illustration of neighborhood range pruning in a 2D environment. (a) Range of without pruning, (b) Range of nodes to be explored (
) after neighborhood range pruning.
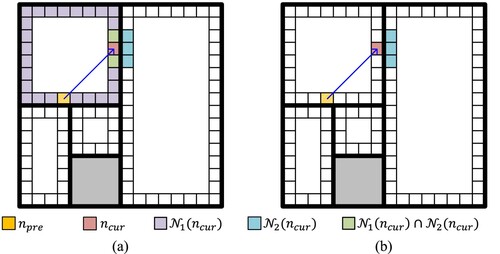
Figure 9. Illustration of exploration-direction pruning in a 2D environment. (a) Range of without pruning, (b) Range of
after directional pruning.
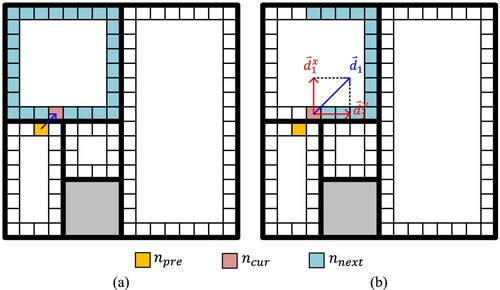
Figure 10. Illustration of the proof of the optimality criterion for exploration-direction pruning in a 2D environment.
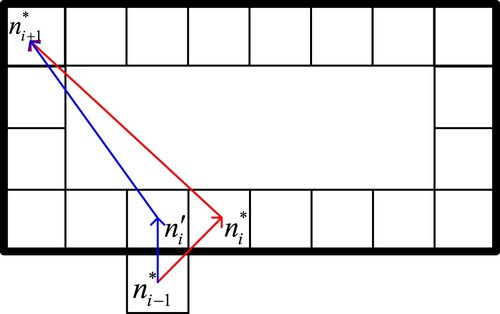
Figure 11. Scene-vector data and voxelized scene models at different levels. The map sizes of (b) – (e) are ,
,
,
,
, respectively. (a) Local city scenes of Zhengzhou (b)
(c)
(d)
(e)
(e)
.
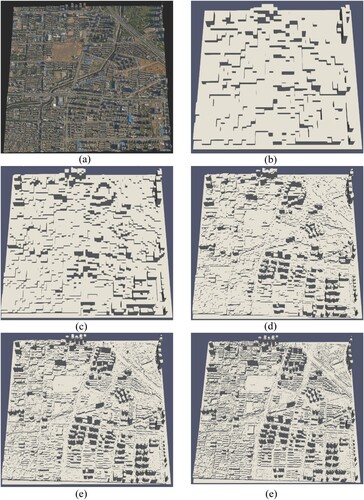
Figure 12. Illustration of different types of grid maps corresponding to : (a) SGM, (b) FOGM, and (c) FSEGM.
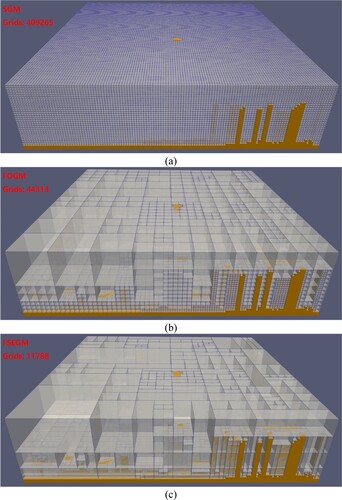
Table 2. Number of grids and border grids required to build each type of grid map for maps of different sizes.
Figure 13. Number of (a) grids and (b) border grids required to build FOGM and FSEGM for models .
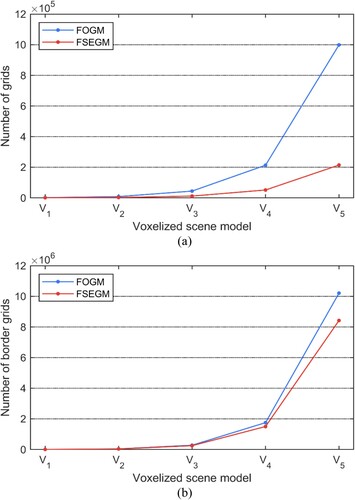
Figure 14. Time required to build SGM, FOGM and FSEGM for models .
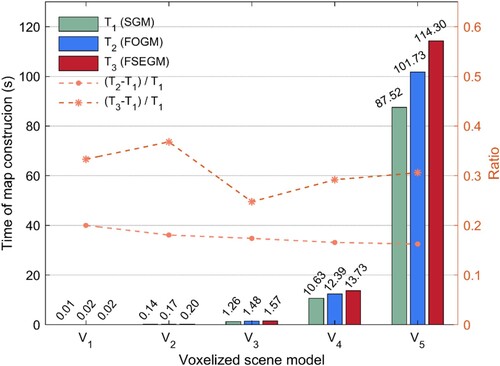
Figure 15. Illustration of path planning results (left column: side view; right column: top view) for (a)(b) SGM + A*, (c)(d) FOGM + A*, (e)(f) FOGM + Multi-scale A*, (g)(h) FSEGM + A*, and (i)(j) FSEGM + Multi-scale A*.
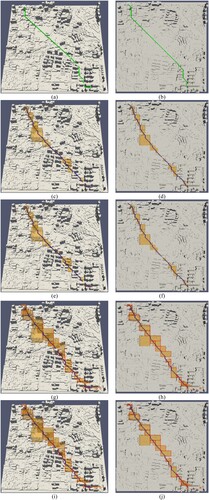
Figure 16. Statistical results of path planning indicators. : number of maintained nodes;
: number of searched nodes;
: number of planned path nodes;
: length of planned path;
: path-planning time. The units of
and
are meters and milliseconds, respectively.
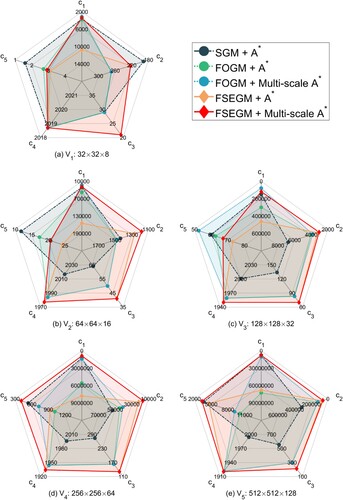
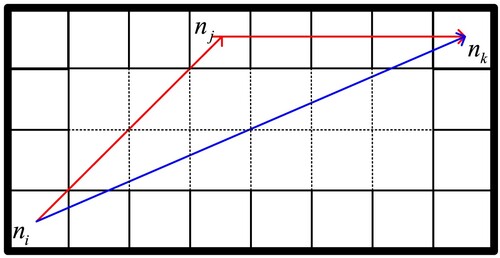
Figure 17. Illustration of the planning length gap. Thick solid line: Node in FMGM (FOGM or FSEGM); Thin solid line: border grids for the node; Dashed line: Aggregated single-scale grid in the node. The red line indicates the optimal path from to
planned in SGM. The blue line indicates the optimal path from
to
planned in FMGM.
Data availability statement
The data that support the findings of this study are available at https://www.scidb.cn/anonymous/N2JJUnZh.