Figures & data
Figure 1. Preservation and improvement of network bi-connectedness.
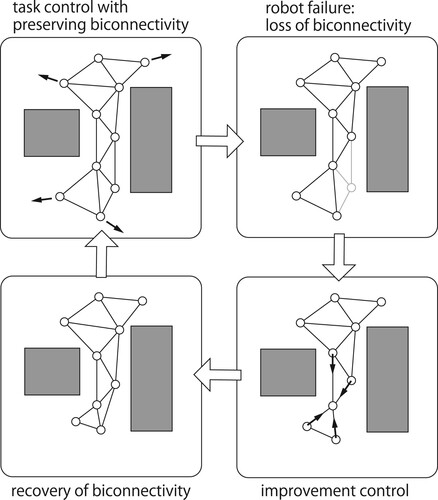
Figure 2. Illustrated description of link weight functions Equations (Equation2(2)
(2) )–(Equation4
(4)
(4) ). (a) Definition of
and
. (b)
with respect to
and (c)
with respect to
.
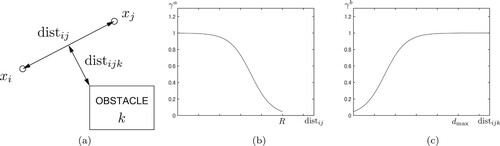
Figure 3. Numerical demonstration of sufficient condition Equation (Equation11(11)
(11) ). (a)
v.s. # of connected component in
and (b) Numerical maximum of
.
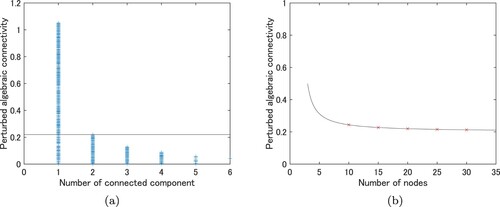
Figure 4. Artificial potential function .
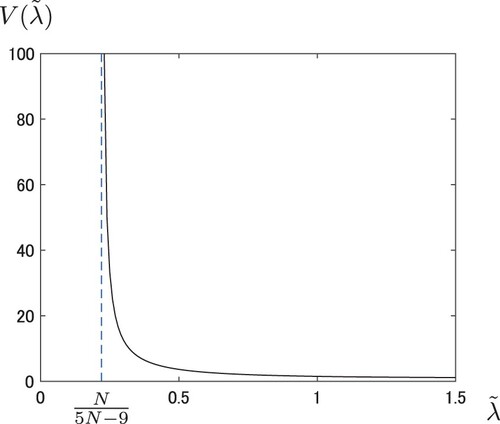
Figure 5. Robots on boundary of convex hull move into
.
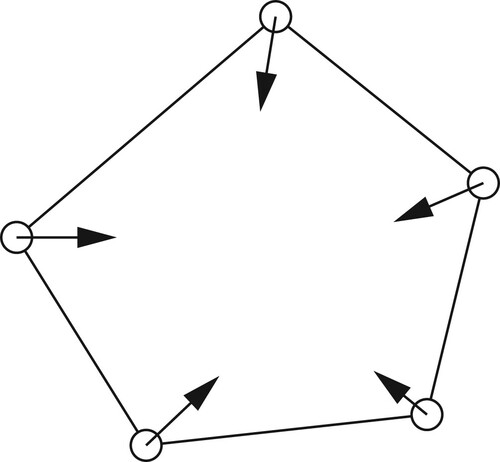
Figure 6. Difficult situation to resume bi-connectivity while keeping other non-articulation nodes.
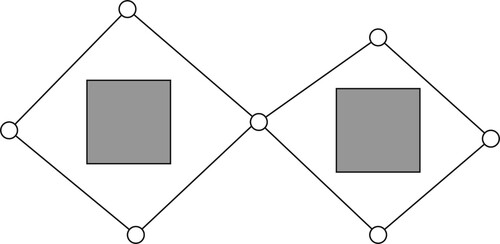
Figure 7. Snapshots of simulation 1. (a) Initial configuration (t = 0). (b) Node 20 is restored at t = 1.9 and (c) Final configuration at t = 10.
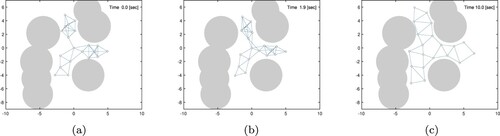
Figure 8. Perturbed algebraic connectivity versus time t.
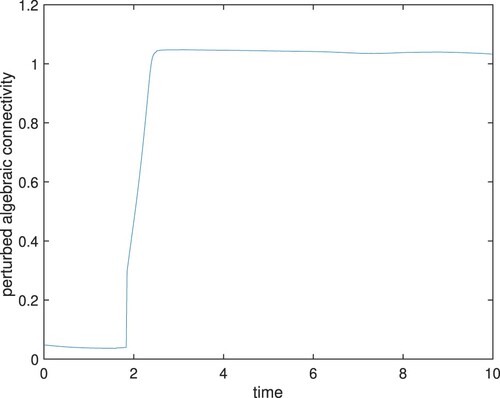
Figure 9. Snapshots of simulation 2. (a) Initial configuration (t = 0). (b) t = 20 and (c) t = 80.
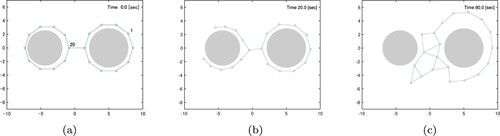
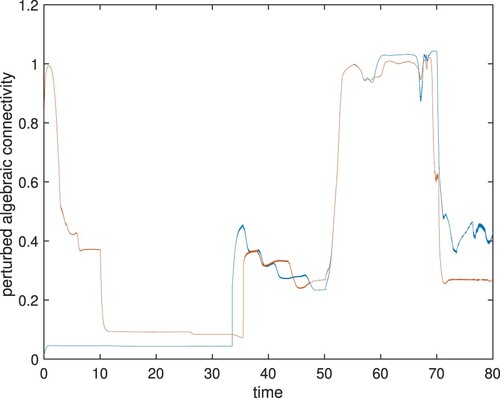
Figure 10. Perturbed algebraic connectivities (blue line) and
(red line) versus time t. Node 1 is initially non-articulation but becomes an articulation node to restore the bi-connectivity of the entire network.