Figures & data
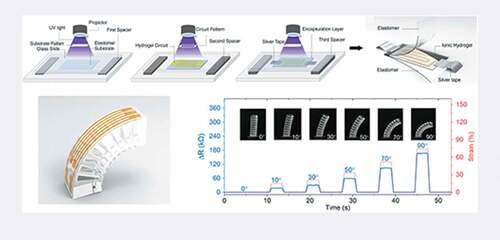
Figure 1. Design and manual fabrication procedures of stretchable strain sensor. (a) Illustration of the sensor. (b) Details of the sandwiched structure of the strain. (c) Snapshot of the fabricated sensor. (d)–(f) Manual fabrication of the stretchable strain sensor
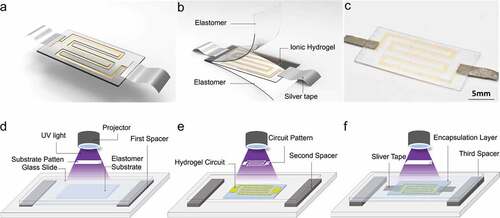
Figure 2. Chemicals used to form stretchable hydrogel and elastomer. (a) Chemicals used to prepare acrylamide-PEGDA hydrogel. (b) Illustration of the ionically conductive hydrogel network. (c) The corresponding chemical structure at crosslinking point of the acrylamide-PEGDA hydrogel. (d) Chemicals used to prepare BA-PEGDA elastomer. (e) Illustration of the elastomer network. (c) The corresponding chemical structure at crosslinking of the BA-PEGDA elastomer
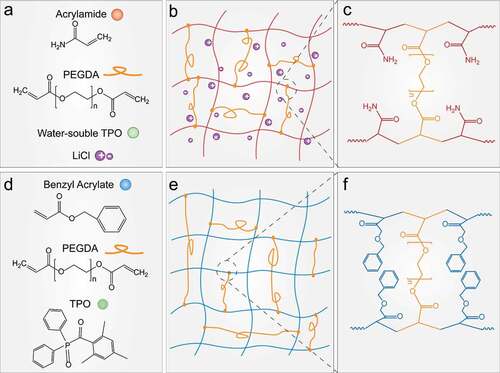
Figure 3. Mechanical property characterization of the UV-curable hydrogel and elastomer. (a) Snapshots showing the high stretchability of the acrylamide-PEGDA hydrogel. (b) Uniaxial tensile tests to investigate the effect of salt content on hydrogel’s mechanical behavior. (c) Effect of salt content on Young’s modulus and elongation-at-break of the acrylamide-PEGDA hydrogel. (d) Snapshots showing the high stretchability of the BA-PEGDA elastomer. (e) Uniaxial tensile tests to investigate the effect of PEGDA content on elastomer’s mechanical behavior. (f) Effect of salt content on Young’s modulus and elongation-at-break of the BA-PEGDA elastomer. (g) Schematic illustration of 180°-peeling test. (h) Snapshots of the peeling test process. (i) The force/width–displacement curves to investigate the interfacial toughness
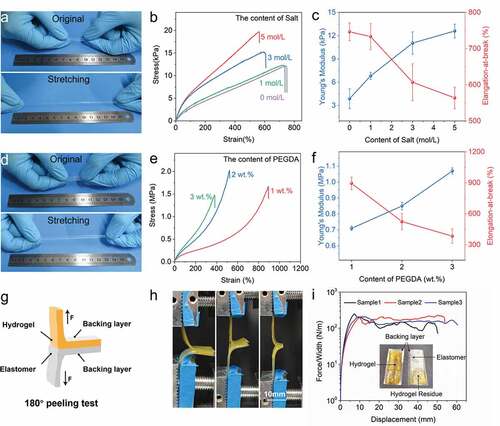
List 1. Comparison on the interfacial toughness of hydrogel-elastomer hybrids
Figure 4. Electrical property characterization of the ionic conductive hydrogel. (a) Schematic of the testing sample. (b) Impedance spectra of the ionic conductive hydrogel samples. (c) Effect of salt content on the conductivity of the hydrogel samples. (d) Relation between strain and resistance change. (e) Dynamic cyclic tests with different amplitude of tensile strains. (f) One cycle of strain sensing performance characterization from 0% to 25%, 50%, and 100%, and then back to 0%. (g) The comparison of weight retention between encapsulated and unencapsulated sensors. (h) The comparison of resistance shift between encapsulated and unencapsulated sensors
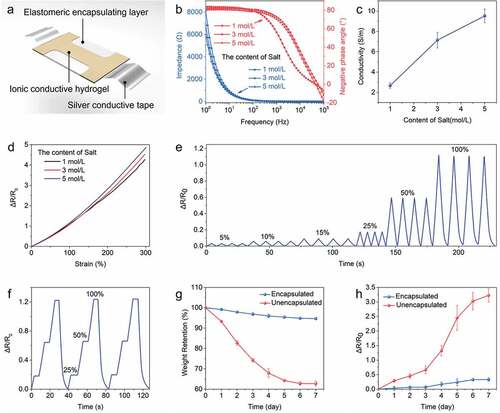
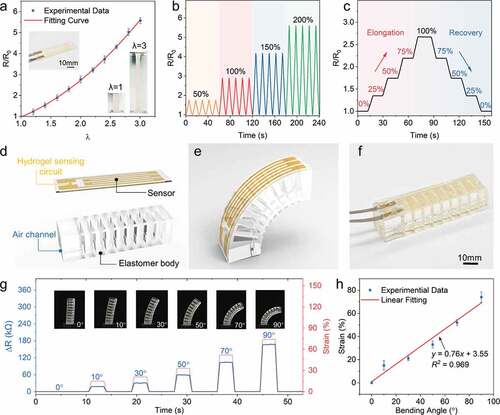
Figure 5. Hydrogel-elastomer-based stretchable strain sensor. (a) Relation between stretch and current-initial resistance ratio. (b) Dynamic cyclic tests with different amplitude of tensile strains. (c) One cycle of strain sensing performance characterization from 0% to 25%, 50%, 75%, and 100%, and then back to 0%. (d) Illustration demonstrating the idea of attaching the hydrogel sensing circuit to the 3D printed PSA. (e) Illustration demonstrating that the sensor is stretched when the actuator bends. (f) Snapshot of the fabricated SPA with the strain sensor attached on the back. (g) Characterization of the strain sensor on the SPA. (h) Relation between bending angle and measured strain on the sensor