Figures & data
Figure 1. Reference frames.
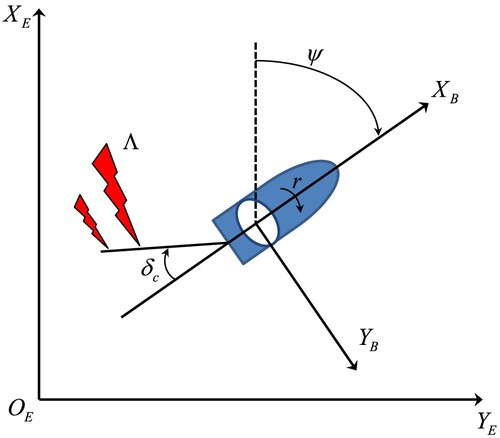
Figure 2. The shared control architecture of MASS.
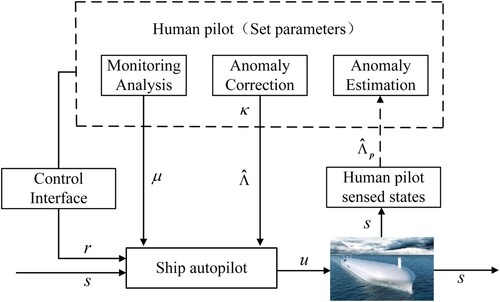
Figure 3. Human pilot input.
Figure 4. Actuator effectiveness coefficient.
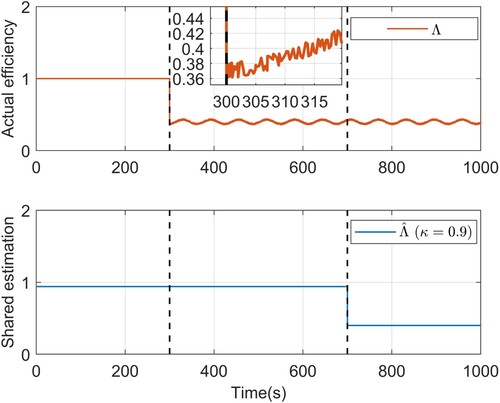
Figure 5. Tracking performance of the heading angle.
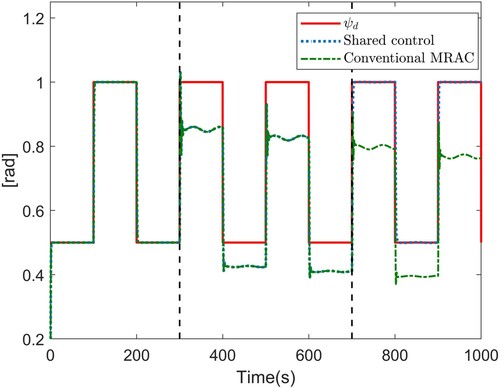
Figure 6. Evolution of adaptive parameters.
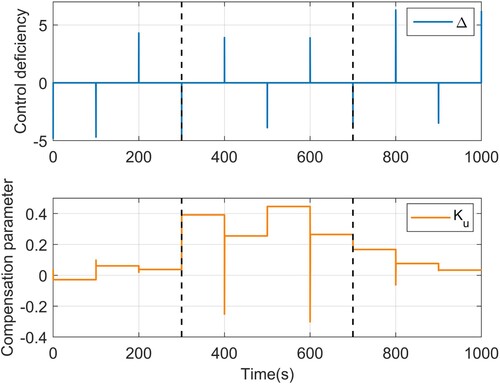
Figure 7. Evolution of adaptive parameters.
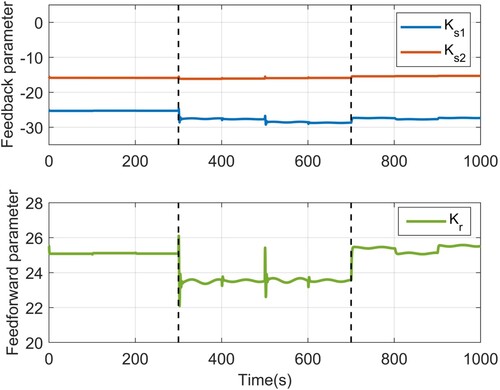
Figure 8. State error of the heading control system.
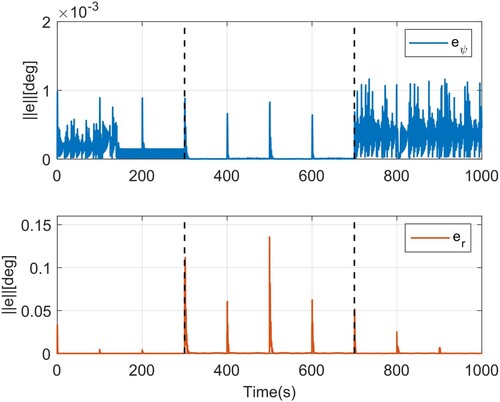
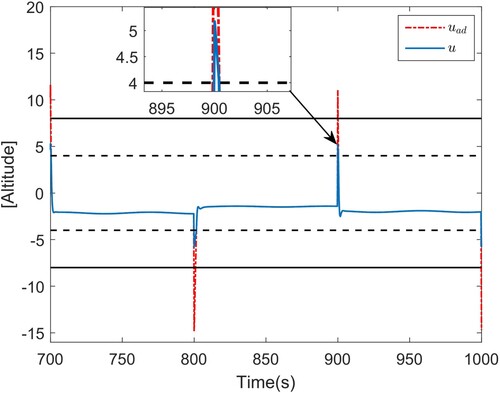
Figure 9. Control input: .
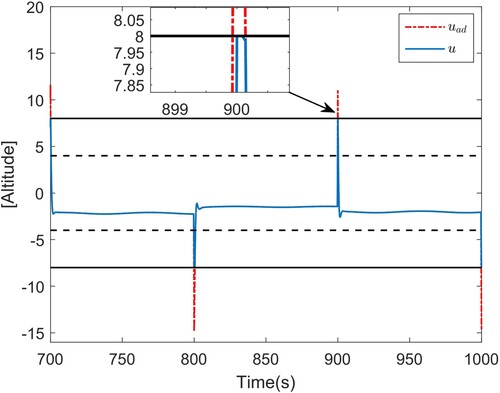
Figure 10. Control input: .