
Figures & data
Figure 1. Wheeled mobile robot with two independent driving wheels.
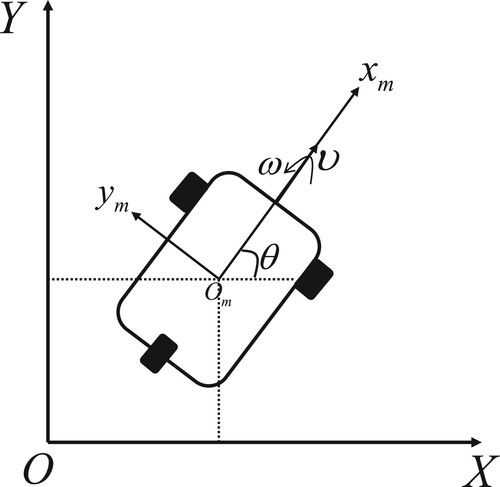
Figure 2. Overall control block diagram.
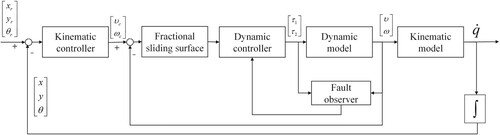
Figure 3. Robot posture error coordinates scheme.
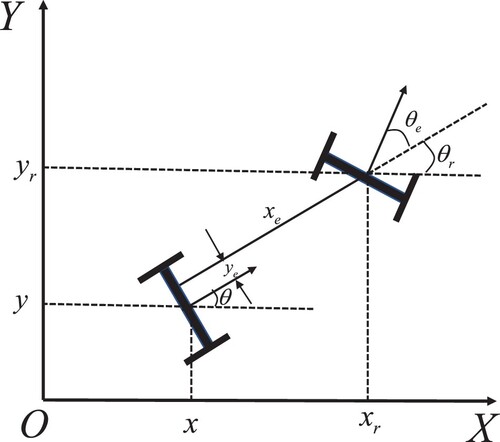
Table 1. Controller parameters.
Figure 4. Robot following circle shape trajectory.
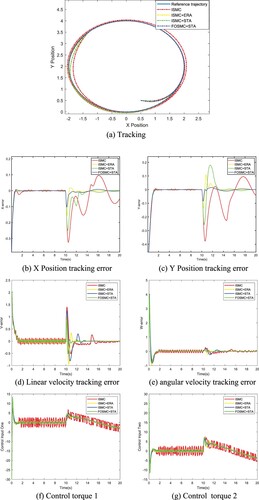
Figure 5. Fault observation performance.
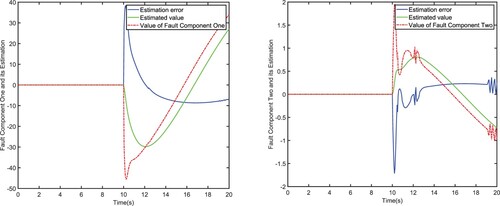
Table 2. X-axis tracking performance indicators.
Table 3. Y-axis tracking performance indicators.
Table 4. Reference velocities and
in tracking eight path.
Figure 6. Robot following the eight-shape trajectory.
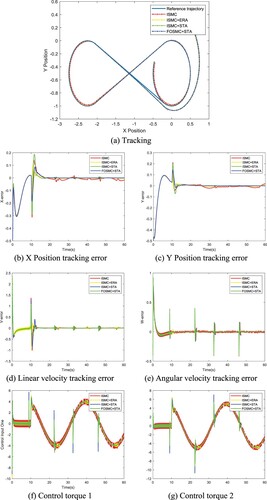
Figure 7. Fault observation performance.
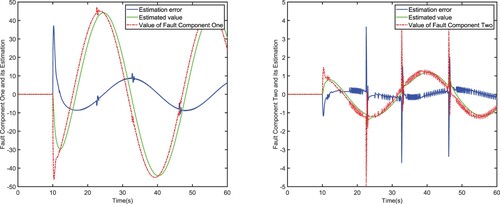
Table 5. X-axis tracking performance indicators.
Table 6. Y-axis tracking performance indicators.
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.