Figures & data
Figure 1. Modelling of differential-drive mobile robot.
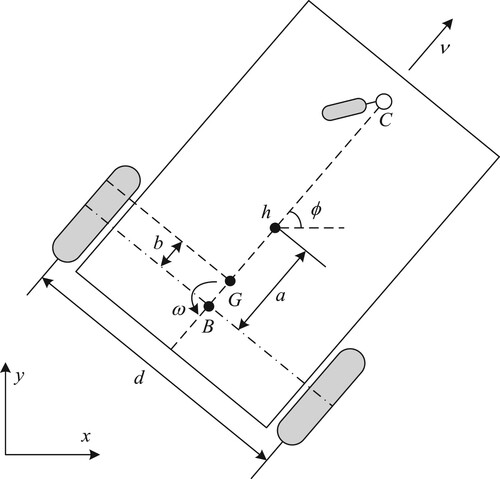
Figure 2. Control system for the trajectory tracking of DDMR.
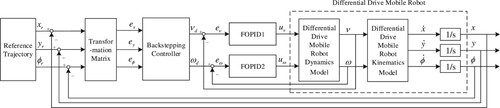
Figure 3. Dynamic controller of DDMR based on FOPID.
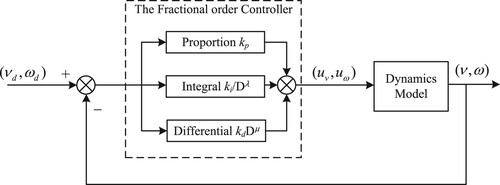
Figure 4. Optimization of control system based on BSO.
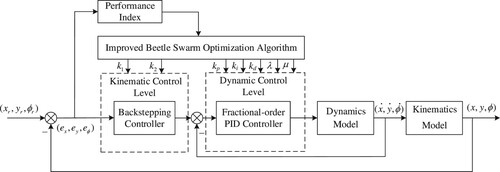
Figure 5. Trajectory tracking result based on PID controller (no skidding and sliding).
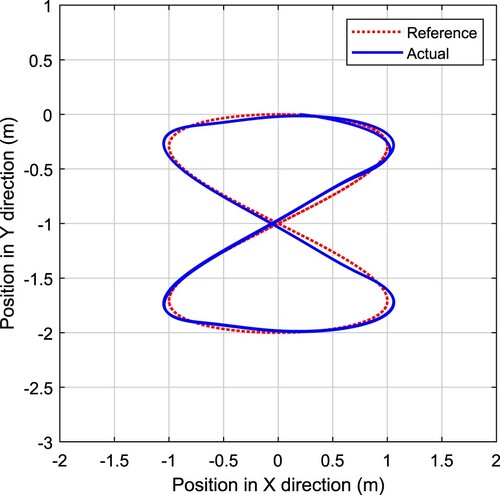
Figure 6. Trajectory tracking result based on PID
controller (no skidding and sliding).
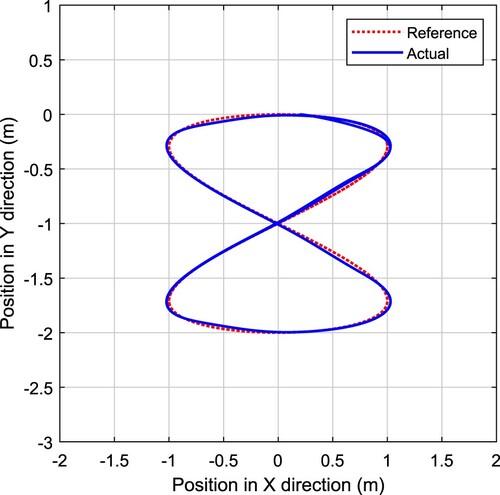
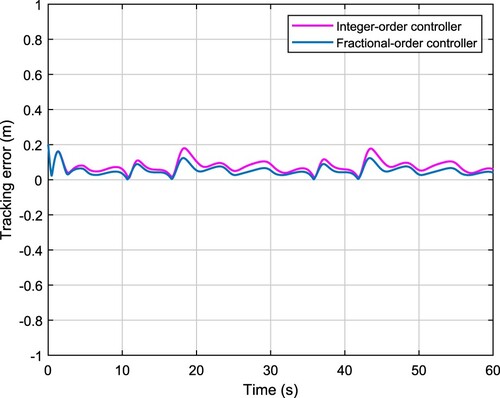
Figure 7. Comparison of trajectory tracking errors (no skidding and sliding).
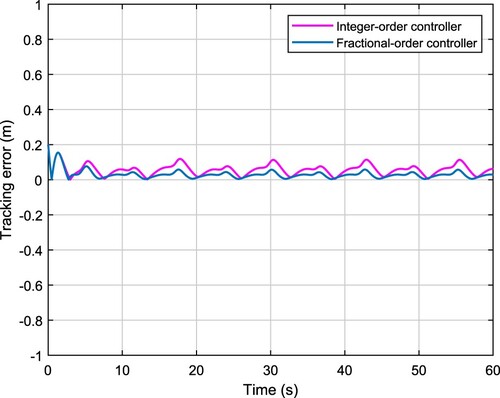
Figure 8. Trajectory tracking result based on PID controller (with skidding and sliding).
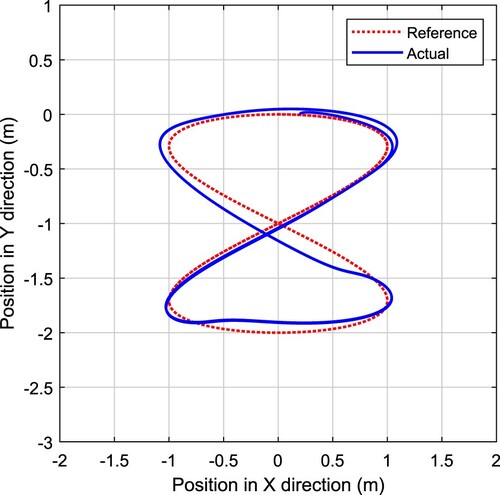
Figure 9. Trajectory tracking result based on PID
controller (with skidding and sliding).
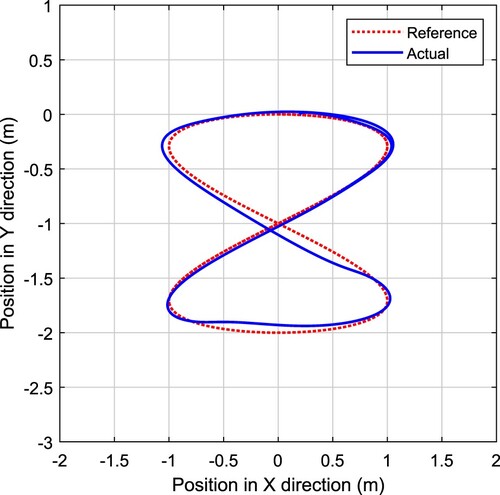
Figure 10. Comparison of trajectory tracking errors (with skidding and sliding).