Figures & data
Figure 1. System structure.
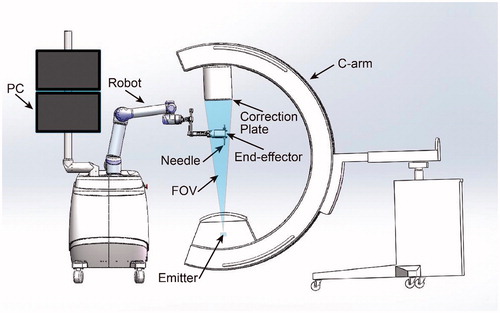
Figure 2. The structure of the end-effector.
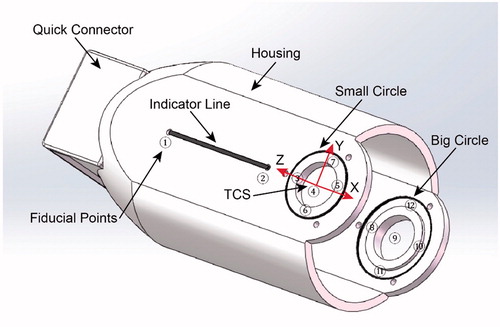
Figure 3. The movement of the end-effector in the FOV of a fluoroscopy.
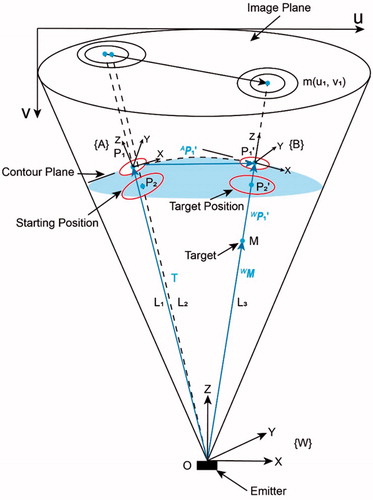
Figure 4. The state when the alignment finished.
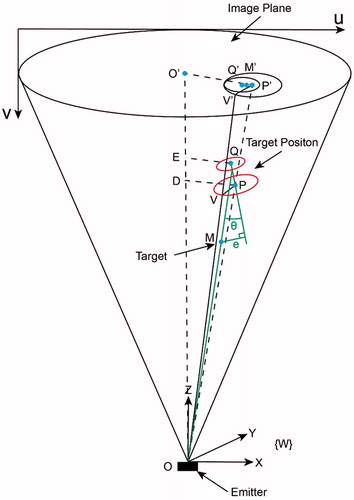
Figure 5. Pre-clinical experiment setup.
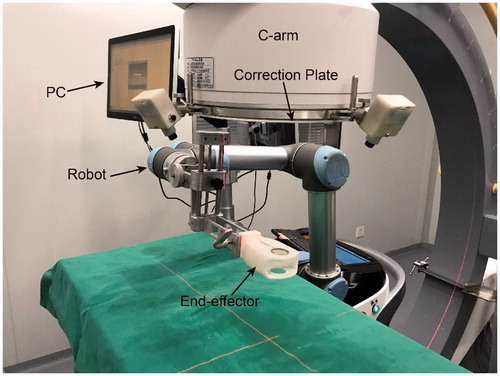
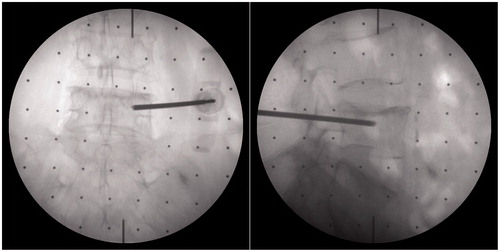
Figure 6. Fluoroscopy images of end-effector in pre-clinical validation. a) The fluoroscopy image before alignment; b) The fluoroscopy image after alignment.
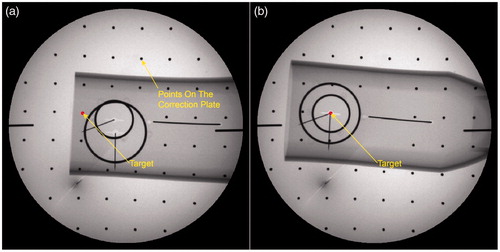
Table 1. The experiment data of pre-clinical experiments.
Figure 7. Fluoroscopy images of end-effector in clinical application. a) The fluoroscopy image before alignment; b) The fluoroscopy image after alignment.
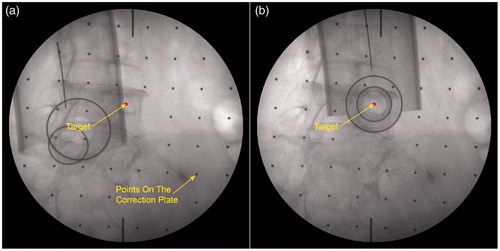
Figure 8. The surgeon finished the needle placement after the targeting.
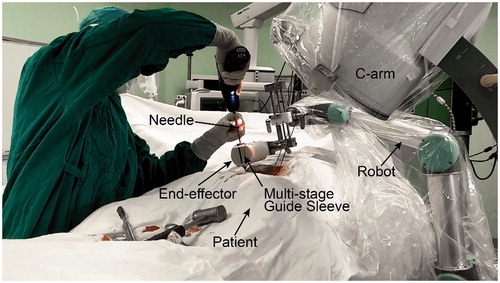
Figure 9. Verifying the accuracy of pedicle screw placement using the AP and lateral fluoroscopic images.