
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
We consider a class of forced continuous-time Lur'e systems obtained by applying nonlinear feedback to a higher-order linear differential equation which defines an input-output system in the sense of behavioural systems theory. This linear system directly relates the input and output signals and does not involve any internal, latent or state variables. A stability theory subsuming results of circle criterion type is developed, including criteria for input-to-output stability and strong integral input-to-output stability, concepts which are very much reminiscent of input-to-state stability and strong integral input-to-state stability, respectively. The methods used in the paper combine ideas from the behavioural approach to systems and control, absolute stability theory and input-to-state stability theory.
1. Introduction
Lur'e systems are feedback connections of linear dynamical systems and static nonlinearities–they form a common and important class of nonlinear control systems. There is a large body of work on the stability properties of these systems, including Carrasco and Heath (Citation2021), Carrasco et al. (Citation2016), Franco et al. (Citation2021), Gilmore et al. (Citation2021), Guiver and Logemann (Citation2020), Guiver et al. (Citation2019), Haddad and Chellaboina (Citation2008), Jayawardhana et al. (Citation2009), Jayawardhana et al. (Citation2011), Khalil (Citation2002), Leonov (Citation2001), Sarkans and Logemann (Citation2015), Sarkans and Logemann (Citation2016b), Vidyasagar (Citation2002), and Yakubovich et al. (Citation2004), usually referred to as absolute stability theory (Carrasco & Heath, Citation2021). Despite originating in the late 1940s, and subject to intensive study since, absolute stability theory is still an active area of research, with recent papers including, for example, Boiko et al. (Citation2022), Drummond et al. (Citation2022), and Guiver and Logemann (Citation2022). Typically, Lur'e systems are considered in a state-space setting or in the functional analytic input-output framework initiated by Sandberg, Zames and other researchers in the 1960s. In much of the literature on state-space theory of Lur'e systems, asymptotic stability properties of unforced Lur'e systems are studied, but the potential effects of persistent external inputs on the asymptotic behaviour of the nonlinear closed-loop dynamics have received relatively little attention (exceptions include Arcak & Teel, Citation2002; Franco et al., Citation2021; Gilmore et al., Citation2021; Guiver & Logemann, Citation2020; Guiver et al., Citation2019; Jayawardhana et al., Citation2009, Citation2011; Sarkans & Logemann, Citation2015).
In contrast, here we consider forced Lur'e systems defined by higher-order differential equations of the form
(1)
(1) where
,
and
are polynomial matrices,
is the operator
(derivative with respect to time), u is an input used for feedback, v is an external input, y is the output and f is a nonlinearity. It is assumed that
and that the rational matrices
and
are proper. Under these conditions, the linear system
(2)
(2) is an input-output system in the sense of the behavioural approach to systems and control (Polderman & Willems, Citation1998, Section 3.3). The systematic investigation of linear differential systems described by polynomial matrices, including models of the form (Equation2
(2)
(2) ), goes back to Rosenbrock (Citation1970) and his work was further developed in algebraic systems theory, see, for example, Blomberg and Ylinen (Citation1983). Textbooks such as Kailath (Citation1980), Kwakernaak and Sivan (Citation1991), and Polderman and Willems (Citation1998) contain detailed discussions of models of the form (Equation2
(2)
(2) ).
It is somewhat surprising that there seems to be hardly any literature on higher-order Lur'e systems, with Brockett and Willems (Citation1965a), Brockett and Willems (Citation1965b), Pendharkar and Pillai (Citation2008), Sarkans and Logemann (Citation2016a), and Willems (Citation1970) being the exceptions we are aware of. The papers (Brockett & Willems, Citation1965a, Citation1965b; Pendharkar & Pillai, Citation2008) and Willems (Citation1970, Chapter 6) study stability properties of certain continuous-time higher-order Lur'e systems which are unforced and single-input single-output (that is, in (Equation1(1)
(1) ), v = 0 and the functions u and y are scalar valued). The paper (Sarkans & Logemann, Citation2016a) develops an input-to-output stability theory for discrete-time higher-order multi-input multi-output Lur'e systems in the presence of forcing.
The current paper develops a theory of continuous-time input-output Lur'e systems (Equation1(1)
(1) ), similar to the discrete-time framework of Sarkans and Logemann (Citation2016a), which is sufficiently general to accommodate not only input-to-output stability results but also the strong integral input-to-output stability property (not covered in Sarkans & Logemann, Citation2016a). This latter property is the input-output counterpart to strong integral input-to-state stability concept for state-space systems (Chaillet et al., Citation2014; Guiver & Logemann, Citation2020). Whilst it is straightforward to define a natural trajectory concept in the discrete-time case, in the continuous-time setting this is more subtle because it is desirable to allow for non-smooth signals, requiring a suitable notion of weak trajectories.
For Lur'e systems of the form (Equation1(1)
(1) ), we consider input-to-output stability concepts which are similar in spirit to the well-known state-space notion of input-to-state stability (ISS) (Dashkovskiy et al., Citation2011; Sontag, Citation1989, Citation2008) and the state-independent input-to-output stability property (Sontag & Wang, Citation1999). The main result of the paper is reminiscent of the complexified Aizerman conjecture (Gilmore et al., Citation2021; Guiver & Logemann, Citation2020; Hinrichsen & Pritchard, Citation1992, Citation2010; Jayawardhana et al., Citation2011; Sarkans & Logemann, Citation2015, Citation2016a, Citation2016b): we show that if (Equation1
(1)
(1) ) is stable with v = 0 and
for all complex matrices L such that
(where the matrix K and scalar r>0 are fixed), then (Equation1
(1)
(1) ) is input-to-output stable for all continuous nonlinearities f for which there exists a strictly increasing continuous comparison function α such that
for all ξ, that is, stability for all linear complex feedbacks in an open ball implies stability for all nonlinear feedback functions satisfying a similar ‘nonlinear’ ball condition. As a corollary of this result, we obtain a version of the circle criterion (Gilmore et al., Citation2021; Guiver & Logemann, Citation2020; Haddad & Chellaboina, Citation2008; Jayawardhana et al., Citation2009, Citation2011; Khalil, Citation2002; Sarkans & Logemann, Citation2015, Citation2016a, Citation2016b; Vidyasagar, Citation2002). These results comprise the main contribution of the current paper. The methods employed in the paper combine ideas from the behavioural approach to systems and control, absolute stability theory and input-to-state stability theory. We emphasise that our input-to-output stability framework should not be confused with the classical input-output concept of
-stability due to Sandberg and Zames (Desoer & Vidyasagar, Citation1975; Vidyasagar, Citation2002). Some more details on the results in individual sections can be found in the next paragraph.
The paper is organised as follows. In the next section, we will present and discuss a number of preliminaries and introduce some terminology and notation. In Section 3, we collect some ISS results for forced state-space Lur'e systems which will serve as key tools in the analysis of the stability behaviour of forced higher-order Lur'e system of the form (Equation1(1)
(1) ). Furthermore, Section 3 contains a number of well-posedness criteria for state-space Lur'e systems with non-zero feedthrough. We allow for non-zero feedthrough in the linear component of the state-space Lur'e system because, to enable applications to the input-output setting in Section 5, the state-space framework should be sufficiently general to capture all input-output systems in the sense of behavioural systems theory (Polderman & Willems, Citation1998, Section 3.3) which includes systems with non-zero feedthrough. The inclusion of non-zero feedthrough in the state-space setting gives rise to a system of coupled nonlinear differential and algebraic equations, and requires a careful well-posedness analysis of the associated initial value problem. Section 4 is devoted to the development of results relating to the behaviours and state-space realisations of linear input-output systems of the form (Equation2
(2)
(2) ). To avoid restrictive smoothness assumptions for the forcing function, behaviours are defined as sets of weak trajectories which are defined in terms of distribution theory. A natural characterisation of weak trajectories as solutions of a suitably integrated version of (Equation2
(2)
(2) ) is also provided. The key result on state-space realisations (Theorem 4.6) shows that, under the assumption of properness of
and
, there exists a state-space realisation of (Equation2
(2)
(2) ) with the property that its full behaviour is isomorphic (in the vector space sense) to the behaviour of (Equation2
(2)
(2) ) (the isomorphism being induced by a certain ‘canonical’ map which enjoys certain useful boundedness properties). Moreover, stabilizability and controllability properties of the realisation correspond nicely to natural conditions in terms of the polynomial matrices
,
and
. In Section 5, we extend the weak trajectory concept to the nonlinear system (Equation1
(1)
(1) ), relate the behaviour of (Equation1
(1)
(1) ) to that of an associated Lur'e system in state-space form (Proposition 5.1), and develop a stability theory for forced input-output Lur'e systems of the form (Equation1
(1)
(1) ) which is inspired by the complexified Aizerman conjecture and the classical circle criterion (Theorem 5.2 and Corollary 5.4). Three examples are discussed in Section 6, and concluding remarks appear in Section 7. Finally, to avoid breaking the flow of the presentation, the proofs of two results in Section 2 are relegated to the Appendix.
2. Notation, terminology and preliminary results
Most mathematical notation we use is standard. Set and
, and let
be the ring of all integers. We denote by
and
the fields of real and complex numbers, respectively. We also define
and
. For
and r>0, we define the open ball in
with centre K and radius r:
where the operator norm is induced by the 2-norms in
and
. For vectors
,
, we write
2.1. Polynomial and rational matrices
Next we provide some preliminary material relating to polynomial and rational matrices. We will be brief and refer to Delchamps (Citation1988), Fuhrmann and Helmke (Citation2015), and Kailath (Citation1980) for more details. The ring of polynomials with coefficients in is denoted by
. For a polynomial matrix
given by
, where
with
, we say that the degree of
is equal to k and write
. The degree of the zero polynomial matrix is defined to be
.The ith row degree
of
is the degree of the polynomial row vector given by the ith row of
, or, equivalently,
, where
is the polynomial in the ith row and jth column of
. Obviously,
. Note that, for a square polynomial matrix
,
, and
is said to be row reduced (or row proper) if
. A square polynomial matrix
is called unimodular if
for some non-zero constant c, or equivalently, if
has an inverse in
.
The following lemma is well known, see, for example, Fuhrmann and Helmke (Citation2015, Proposition 2.19 and Theorem 2.20) and Kailath (Citation1980, pp. 384).
Lemma 2.1
Let be such that
.
| (1) | There exists unimodular | ||||
| (2) | The polynomial matrix is row reduced if, and only if, the limit matrix
| ||||
Denoting the entries of and R by
and
, respectively, and the leading coefficient of
by
, then
if
and
if
. In the literature, the matrix R is therefore sometimes referred to as the ‘highest-row-degree coefficient matrix’ of
.
A square polynomial matrix is said to be Hurwitz if
for all
, where
is the closure of
(that is,
is the closed-right half of the complex plane).
The field of rational functions with coefficients in is denoted by
. For a rational function
, where
,
, the difference
is said to be the relative degree of
. In particular, the relative degree of the zero rational function is equal to ∞. For a rational matrix
, the relative degree
of
is defined to be the minimum of the relative degrees of its non-zero entries. According to this definition, the degree of the zero rational matrix is equal to ∞. Note that if
is not the zero matrix, then the relative degree of
is equal to
if, and only if, the limit of
, as
, exists in
and is not equal to 0. We say that
is proper if
. If the inequality is strict, then
is said to be strictly proper. A rational matrix
is in the Hardy space
of all bounded holomorphic functions
if, and only if,
is proper and does not have any poles in the closed right-half plane, in which case we define
For a square polynomial matrix
, we introduce the concept of left degree of
which is defined as follows:
Trivially,
. The concept of left degree seems to be new–at least we were not able to find it in the literature.
Some of the relationships between the various degrees are highlighted in the following result, the proof of which can be found in the Appendix.
Proposition 2.2
Let and
be such that
and set
. The following statements hold.
| (1) |
| ||||
| (2) | If | ||||
| (3) |
| ||||
| (4) |
| ||||
| (5) | If | ||||
| (6) | If | ||||
Obviously, in the scalar case (that is, p = m = 1) equality holds in statement (1). Simple examples show that, in general, the identity does not hold. As for statement (2), note that statement (1) of Lemma 2.1 guarantees the existence of a unimodular matrix
such that
is row reduced.
2.2. Functions and function spaces
The symbols ★ and denote convolution and composition of functions, respectively. For
and
, let
denote the usual Lebesgue space of functions defined on
with values in
. The local version of
is denoted by
. As usual,
is the vector space of continuous functions defined on
with values in
, and the space of l-times continuously differentiable functions
is denoted by
. We set
. Further, for
,
and
, we define
to be the space of all
such that
is (locally) absolutely continuous and
. It is convenient to set
. We remark that
can be identified with the space
where
is the local version of the Sobolev space
of regular distributions on
and
denotes the distributional derivative. Note that
, for example, the function x defined by
for
is in
for all
, whilst
if, and only if, l = 0, 1.
The space of real-valued Bohl functions defined on is denoted by
, that is,
is the space of all finite linear combinations of functions of the form
, where
,
and
. The space of
-valued Bohl functions can be defined in a similar way, is denoted by
and can be identified with
. We set
.
For the convenience of the reader, we recall the definitions of three classes of comparison functions. The sets and
are defined by
and
denotes the set of functions
with the following properties:
for every
, and
is non-increasing with
for every
. For more details on comparison functions, we refer the reader to Kellett (Citation2014).
Finally, we state a lemma about the potential smoothing effect of convolution operators induced by proper rational matrices. It should be well-known, but we could not find a suitable statement in the literature. For completeness, we provide a proof in the Appendix.
In the following, let δ be the Dirac distribution (delta function) supported at 0.
Lemma 2.3
Let be non-zero and proper with inverse Laplace transform denoted by G. Set
and
. If
for some
and
, then the convolution
is in
and
(3)
(3)
3. Input-to-state stability for state-space Lur'e systems
In this section, we consider controlled Lur'e systems in state space and record a stability result which will play an important role for the theory of input-output Lur'e systems developed in Section 5. For fixed and variable
, define
With
, we associate the following controlled and observed linear state-space system
(4)
(4) Below, the input u will be used for nonlinear output feedback of the form
and v will be an an external input to the nonlinear feedback system. Frequently, we will refer to (Equation4
(4)
(4) ) as the system
. We let
, given by
, denote the transfer function of the linear state-space system
(equivalently, of (Equation4
(4)
(4) ) with v = 0).
The behaviour of S (or of (Equation4
(4)
(4) )) is the linear subspace of all quadruples
which satisfy (Equation4
(4)
(4) ) almost everywhere on
(as we are interested in stability properties, we restrict attention to forward time). The elements of
are called trajectories of S.
A matrix is said to be a stabilising (complex) output feedback matrix for
if 1 is not an eigenvalue of DK and all eigenvalues of the matrix
have negative real parts, the set of which we denote by
.
If is stabilizable and
is detectable, then, as is well-known,
can be characterised in terms of the transfer function
as follows:
(5)
(5) Application of the nonlinear feedback
to the state-space system (Equation4
(4)
(4) ), yields the following closed-loop system
(6)
(6) which will be denoted by
, where
is continuous. The behaviour
of
is the set of all triples
such that
satisfies (Equation6
(6)
(6) ) for almost every
. Equivalently,
if, and only if,
. Elements in
will also be referred to as trajectories of
.
The following stability result will play an important role in Section 5.
Theorem 3.1
Let ,
be continuous,
and r>0. Assume that
,
and there exists continuous
such that
(7)
(7) The following statements hold.
| (1) | If | ||||
| (2) | If | ||||
Inequalities (Equation8(8)
(8) ) and (Equation9
(9)
(9) ) say that the Lur'e system (Equation6
(6)
(6) ) is ISS and integral ISS, respectively (Dashkovskiy et al., Citation2011; Sontag, Citation2008). Statement (2) is a criterion for strong integral ISS (Chaillet et al., Citation2014; Guiver & Logemann, Citation2020) of (Equation6
(6)
(6) ). Proofs of statements (1) and (2) can be found in Sarkans and Logemann (Citation2015) and Guiver and Logemann (Citation2020), respectively, both in the special case when D = 0. A careful analysis of these proofs shows that they carry over to the non-zero feedthrough case
, provided that
. As has been mentioned in the Introduction, we allow for non-zero feedthrough D because, for later purposes (see Section 5), we wish the state-space framework to be sufficiently general to capture all input-output systems in the sense of behavioural systems theory (Polderman & Willems, Citation1998, Section 3.3) including those with non-zero feedthrough.
If and
, then it is well-known that the largest possible value for r>0 such that
is equal to
. It follows that if
, then the condition
is only violated if
and
(the latter identity means that
attains its
-norm at ∞). In the (not very interesting) case wherein
(and hence, D = 0), we have that
and
for every r>0, and it follows that the conclusions of Theorem 3.1 hold for every linearly bounded nonlinearity f.
We say that
where
, is a pre-trajectory of
if
satisfies (Equation6
(6)
(6) ) for almost every
. The triple
is said to be maximally defined if there does not exist another pre-trajectory
such that
and
. A routine argument based on Zorn's lemma shows that every pre-trajectory of
can be extended to a maximally defined pre-trajectory of
. The set of all maximally defined pre-trajectories of
is denoted by
. Obviously,
, that is, every trajectory is also a (maximally defined) pre-trajectory.
In Theorem 3.1, the triples under consideration are assumed to be trajectories that is, elements in
(and hence defined on the half line
). Statement (3) of Proposition 3.2 below shows that, under certain conditions, the assumptions of Theorem 3.1 imply that
. Note that nonzero feedthrough D can cause issues with well-posedness (that is, existence and uniqueness of solutions to initial-value problems associated with (Equation6
(6)
(6) )), because (Equation6
(6)
(6) ) is a ‘mixture’ of nonlinear differential and algebraic equations if
(see Examples (3.3) and (3.4) below). Proposition 3.2 provides natural sufficient condition guaranteeing well-posedness in the presence of nonzero feedthrough D.
Proposition 3.2
Let and
. Let
be locally Lipschitz and such that
defined by
(10)
(10) is of class
. The following statements hold.
| (1) | If | ||||
| (2) | If | ||||
| (3) | If | ||||
Note that the conditions involving and
are trivially satisfied when D = 0.
The following simple examples show that, in general (in the absence of the hypotheses of Proposition 3.2), even if f is globally Lipschitz, we may have , and, for given
and
, the set of pre-trajectories
satisfying
may be empty or contain several elements.
Example 3.3
Consider the closed-loop system (Equation6(6)
(6) ) with
and nonlinearity f given by
It is easy to check that
and we note that
(13)
(13) Let
,
. If
is a pre-trajectory defined on some interval
and such that
, then y satisfies
and thus
(14)
(14)
Invoking (Equation13
(13)
Let now
has the unique solution
is solved by
does not have a solution for all
Setting for all
and
we conclude that
is the unique maximally defined pre-trajectory satisfying
. Note that although the pre-trajectory
is bounded on
, it cannot be continued to the right beyond
.
Example 3.4
Consider the scalar system
which is a special case of (Equation6
(6)
(6) ) with A = −1 and
. With f given by
and
,
and
it is easy to check that
. As
, we see that there are multiple trajectories of the form
satisfying
.
Proof
Proof of Proposition 3.2
To start, we define the map by
for all
which will play a key role in the proof.
To prove statement (1), let and
. It is sufficient to show that F is a
-diffeomorphism. Indeed, in this case, it follows from (Equation6
(6)
(6) ) that every
satisfies
and
(15)
(15) on the interval on which
is defined. As f is locally Lipschitz and
is of class
, the map
is measurable in t for fixed z and locally Lipschitz in z in the sense that, for every compact set
and every
, there exists L>0 and a set
of zero measure such that
where we have used that v is locally essentially bounded. Consequently, by a standard result in the theory of ordinary differential equations, (Equation15
(15)
(15) ) has a unique maximally defined solution x satisfying
, and statement (1) follows.
It remains to prove that F is a -diffeomorphism. For this purpose, we define the map
by
and show that H is a
-diffeomorphism. As
for all
, it then follows that F is also a
-diffeomorphism. Since
we obtain that
for all
, and thus, by the local inversion theorem (see, for instance, Ambrosetti and Prodi (Citation1993, Theorem 1.2 in Chapter 2), H is a local
-diffeomorphism. Furthermore, using that (Equation11
(11)
(11) ) holds with b<1, we see that
as
, and the global inverse function theorem (see, for example, Ambrosetti & Prodi, Citation1993, Theorem 1.8 in Chapter 3 or Sandberg, Citation1980, Theorem 2) now implies that H is a
-diffeomorphism.
We proceed to prove statement (2). By Cramer's rule,
which combined with (Equation12
(12)
(12) ) shows that the function
is bounded. Thus, by the Hadamard-Levy theorem (see Deimling, Citation1985, Theorem 15.4 or De Marco et al., Citation1994, Theorem 0.2), F is a
-diffeomorphism, and we can argue as in the proof of statement (1) to show that, for every
and every
, there exists a unique pair
such that
and
. As
we see that the function
is bounded, implying that
is globally Lipschitz, and thus
as
. Therefore, there exists
such that
(16)
(16) with g defined as in (Equation15
(15)
(15) ). Let
and let
be the (maximal) interval on which
is defined. We have to show that
. By (Equation15
(15)
(15) ) and the variation-of-parameters formula, we have
A routine argument based on the Gronwall lemma and (Equation16
(16)
(16) ) shows that x is bounded if
, but that is not possible, whence
.
Finally, to prove statement (3). It follows from the hypotheses that (Equation11(11)
(11) ) is satisfied with a = 0 and
. Hence, invoking statement (1), we conclude that for every
and every
, there exists a unique pair
such
and
. Let
with (maximal) interval of definition
. It remains to show that
. Exploiting the hypotheses once more, we see that the map F is radially unbounded and
for all
, hence F is a
-diffeomorphism, and so x satisfies (Equation15
(15)
(15) ). The Lyapunov analysis developed in the proof of the stability result Theorem 3.1 (see Guiver & Logemann, Citation2020; Sarkans & Logemann, Citation2015) shows that x is bounded on
. As x is a maximally defined solution of (Equation15
(15)
(15) ), we conclude that
, and consequently, the triple
is in
.
4. Linear input-output systems: key concepts and results
Before discussing input-output Lur'e systems in Section 5, we consider a key constituent ingredient, namely, linear input-output systems of the form (Equation2(2)
(2) ) which relate input and outputs by means of higher-order differential equations. More formally, let
be the following subset of
:
if, and only if,
and both
and
are proper. Let
and set
, so that
for suitable matrices
, where
. Note that, since
and
are proper,
and
. Consequently,
for suitable matrices
and
. Obviously, if
or
, then
or
, respectively.
With , we associate the following linear input-output system
(17)
(17) or, equivalently,
(18)
(18) where u is an input available for feedback, v is an external input and y is an output. As we are interested in stability theory, we have chosen
as the time domain in (Equation18
(18)
(18) ).
In this section, we shall introduce a suitable weak trajectory concept for (Equation17(17)
(17) ), define the behaviour of (Equation17
(17)
(17) ) in terms of weak trajectories, analyse the structure of weak trajectories (see Proposition 4.3) and prove the existence of a state-space realisation S of (Equation17
(17)
(17) ) such that the behaviours of S and (Equation17
(17)
(17) ) are isomorphic under a natural isomorphism (see Theorem 4.6).
Obviously, interpreted in the classical sense, (Equation17(17)
(17) ) and (Equation18
(18)
(18) ) are only meaningful if u, v and y are sufficiently often differentiable. Since it is desirable to allow for discontinuous inputs u and v (step functions, for example), it would be restrictive to impose any smoothness assumptions on u and v. However, in the absence of suitable differentiability properties, it is still possible to make sense of (Equation17
(17)
(17) ) and (Equation18
(18)
(18) ) by using basic ideas from distribution theory. To this end, let
, where
, and let
denote the extension by zero of w to all of
. In the following, the function
and the regular
-valued distribution on
induced by
will be identified. Locally integrable functions and the associated regular distributions will not be distinguished notationally. We say that the triple
is a weak trajectory of (Equation17
(17)
(17) ) if there exist
,
, such that
(19)
(19) where
denotes the distributional derivative and
is the Dirac distribution. The behaviour
of (Equation17
(17)
(17) ) is defined to be the set of all weak trajectories of (Equation17
(17)
(17) ). It is obvious that
is a linear subspace of
, and any ‘classical trajectory’
(in the sense that
is sufficiently often differentiable for (Equation18
(18)
(18) ) to hold for almost every
) is a weak trajectory.
We present a simple example of a weak trajectory which is not classical.
Example 4.1
Consider (Equation17(17)
(17) ) with
,
and
. Let
,
and define
Then
and
, where
is the Dirac distribution supported at τ. Consequently,
showing that
is a weak trajectory. It is obvious that
is not a classical trajectory.
We now briefly explain how the concept of a weak trajectory can be characterised in terms of an integrated version of (Equation17(17)
(17) ). For this purpose set
and define polynomial matrices associated with
,
and
as follows:
(20)
(20)
Proposition 4.2
A triple is a weak trajectory of (Equation17
(17)
(17) ) if, and only if, there exist
,
, such that
(21)
(21)
We remark that in Polderman and Willems (Citation1998) a weak trajectory concept is defined via (Equation21(21)
(21) ): as the ‘bilateral’ trajectories (trajectories defined on
) are considered in Polderman and Willems (Citation1998), the equation in (Equation21
(21)
(21) ) is required to hold for almost every
.
Proof
Proof of Proposition 4.2
Let denote the Heaviside function, that is,
Let
and assume that (Equation21
(21)
(21) ) holds. It then follows that
Taking the kth distributional derivative of this identity results in (Equation19
(19)
(19) ) with
for
. Hence,
Conversely, let , and so, (Equation19
(19)
(19) ) holds. By a well-known result of distribution theory (see, for example, Zemanian, Citation1987, Theorem 2.6-1), any two primitives of a distribution on
differ by a constant distribution, and consequently, invoking (Equation19
(19)
(19) ), we conclude that there exists
such that
(22)
(22) As the distribution
and the distribution on the left-hand side of (Equation22
(22)
(22) ) have their supports in
, the same must apply to the constant distribution
, and thus
. Taking primitives on both sides of (Equation22
(22)
(22) ) and continuing with this process, we obtain that
Restricting attention to the half-line
, we see that (Equation21
(21)
(21) ) holds with
.
Proposition 4.3 below shows that and
are closely related, where
is defined in the classical sense, that is,
Furthermore, we set
and note that a function
is in
if, and only if, there exist
,
, such that
.
Let G and denote the inverse Laplace transforms (impulse responses) of
and
, respectively. We note that the entries of G and
are elements in
.
Proposition 4.3
Let . The following statements hold.
| (1) |
| ||||
| (2) |
| ||||
| (3) |
| ||||
| (4) |
| ||||
| (5) | If the triple | ||||
Proof.
Statement (1), sometimes referred to as Chrystal's theorem, is valid for all such that
. Its proof (which is based on the Smith canonical form for polynomial matrices) can be found in, for example, Gohberg et al. (Citation1982, Theorem S1.6) and Polderman and Willems (Citation1998, Theorem 3.2.16).
To establish statements (2)–(4), let denote the convolution algebra of real distributions on
with support contained in
and define
Since
, the inverse
exists and is a matrix of real rational functions. Consequently, the inverse Laplace transform of
, denoted by
, is in
and is the inverse of P (with respect to convolution). The Laplace transforms of
,
and
are equal to
,
and
, respectively. Obviously,
and
extend G and
to
, respectively. Now
and
are proper real rational matrices and so the entries of
and
are are of the form
, where
,
, and, as before,
denotes the extension of the function by zero to all of
.
We proceed to prove statement (2), let and set
. Then
, whence
. As
,
and
, we conclude that
showing that
.
To prove statement (3), let and assume that
. Then
, and as
by statement (2), linearity of the behaviour implies that
Conversely, let us assume that
. Then there exist
,
, such that
or, equivalently,
from which it follows that
(24)
(24) The entries of
are real rational functions and thus the entries of
are of the form
(25)
(25) Consequently, the components of
are also of the form (Equation25
(25)
(25) ). But as the LHS of (Equation24
(24)
(24) ) is locally essentially bounded, the non-regular distributional part of
must be equal to 0. Therefore, setting
and noting that
, we conclude that
. As
, or equivalently,
, it follows that
for all t>0, and, by continuity, this identity extends to
, showing that
for all
, completing the proof of statement (3).
To establish statement (4), we note that if , then, trivially,
and
, whence
. Conversely, if
, then
, and statement (3) implies that
.
Finally, we prove statement (5). Let be such that (Equation23
(23)
(23) ) holds. By a well-known result from distribution theory (see, for example, Zemanian, Citation1987, Theorem 3.5-2), there exist
and
,
, such that
Without loss of generality, we may assume that
. We need to show that
for
. As in the proof of Proposition 4.2, by taking primitives on both sides of the above identity and repeating this process k-times, we obtain
(26)
(26) where
,
and
are given by (Equation20
(20)
(20) ) and
The distribution on the left-hand side of (Equation26
(26)
(26) ) is regular and therefore
, implying that
for
and completing the proof of statement (5).
We remark that statements (2)–(4) of Proposition 4.3 can also be proved by combining Proposition 4.2 with suitable modifications of arguments in Polderman and Willems (Citation1998), see Polderman and Willems (Citation1998, proofs of Theorems 3.2.15, 3.3.13 and 3.3.19).
Corollary 4.4
Let .
| (1) | If | ||||
| (2) | If | ||||
Proof.
Trivially, for unimodular , we have
,
and
, and thus, statement (1) is an immediate consequence of statement (3) of Proposition 4.3. To prove statement (2), we make use of statement (6) of Proposition 2.2, which implies that
is unimodular. Consequently,
and
are polynomial matrices, which, combined with the properness of
and
, shows that
and
. An application of statement (1) with
yields that
. Since, trivially,
the claim follows.
The next corollary follows from Lemma 2.3 and statement (3) of Proposition 4.3. Not surprisingly, the corollary shows that if , then any smoothness properties of
are inherited by y and the smoothness enjoyed by y is enhanced by strict properness of
and
.
Corollary 4.5
Let , assume that
and let d and
be the relative degrees of
and
, respectively. If
with
,
and
, then
, where
.
Note that, as , we have
, and so
. The assumption
avoids the occurrence of the uninteresting scenario in which the Lur'e system (Equation1
(1)
(1) ) ‘degenerates’ into the linear system
.
For the rest of the paper we set
and define
Whilst, in general, point evaluations for the functions u, v or y and their derivatives do not make sense, the function
is in
(by statement (3) of Proposition 4.3) and so the definition of
is meaningful. In the following,
will play the role of an initial-value vector for the trajectory
.
In order to apply the state-space results of Section 3 in the stability analysis of input-output Lur'e systems (see Section 5), we will prove the existence of suitable state-space realisations of the linear input-output system . To this end, we define an n-dimensional realisation of
to be a state-space system
such that
and
. A realisation of minimal dimension is said to be a minimal realisation.
The following theorem is the main result of this section. It guarantees the existence of a realisation S of such that the behaviours
and
are isomorphic and the corresponding isomorphism has certain useful boundedness properties.
Theorem 4.6
Let , define
and set
. The following statements hold.
| (1) | There exists an n-dimensional realisation | ||||
| (2) | The map | ||||
| (3) | For every | ||||
| (4) | Assume that | ||||
| (5) | Under the additional assumption that there exists | ||||
| (6) | Under the additional assumption that | ||||
In the ‘extreme’ case wherein , it follows from statement (6) of Proposition 2.2 that
is unimodular, hence n = 0, and the conclusions of Theorem 4.6 hold trivially. Indeed, the 0-dimensional realisation
is controllable and observable,
,
for all
,
and so, invoking statement (2) of Corollary 4.4,
.
By statement (4) of Proposition 2.2, . If
, then (Equation28
(28)
(28) ) follows immediately from the observability of
. But typically, we will have
(for example, if
is invertible and p>1) and in that case (Equation28
(28)
(28) ) provides additional information. Note that in statement (4),
and
as a consequence of statement (5) of Proposition 2.2. If
(
), then the first (second) sum on the RHS of (Equation31
(31)
(31) ) is defined to be equal to 0.
Proof
Proof of Theorem 4.6
Parts of the proof are similar to arguments used in the proof of the corresponding result in the discrete-time case (see Sarkans & Logemann, Citation2016a, Theorem 3.2). However, there are some significant differences (including properties which are not covered by Sarkans & Logemann, Citation2016a, Theorem 3.2) and we will focus on these. As pointed out in the above commentary, it may be assumed, without loss of generality, that . We proceed in two steps.
Step 1. In this step, we assume that is row reduced and the row degrees
, where
, satisfy
. It follows from statement (2) of Proposition 2.2 that
. Let
be the unique integer such that
for all
and
for all
. Since
is row reduced, we have that
. Following the argument in Sarkans and Logemann (Citation2016a), it can be shown that there exists an n-dimensional realisation
of
such that
is observable and
where
We remark that the so-called observer-form realisation (Kailath, Citation1980, Section 6.4) plays a key role in the construction of the realisation S.
To establish (Equation27(27)
(27) ), it is sufficient to show that
(32)
(32) Indeed, invoking Proposition 4.3, the dimension of
is equal to n, and so, if (Equation32
(32)
(32) ) holds, then
, which is (Equation27
(27)
(27) ).
To prove (Equation32(32)
(32) ), let
. By Proposition 4.3, w is a Bohl function and, hence, has a Laplace transform, denoted
. Taking the Laplace transform of the equality
, and using standard properties of the Laplace transform, gives
where
is the linear map given by
(33)
(33) Consequently, since
, there exists
such that
if, and only if,
As
, we see that there exists
such that
if, and only if,
(34)
(34) In the following, let
denote the ith component of
for
. As in Sarkans and Logemann (Citation2016a), it can be shown that
(35)
(35) and
(36)
(36) Setting
and
the ith component of the left-hand side of (Equation34
(34)
(34) ) is given by
for
, where
denotes the jth component of z. Consequently, (Equation34
(34)
(34) ) can be written in the form
We conclude that (Equation34
(34)
(34) ) has a unique solution
which is given by
(37)
(37) where we have used (Equation35
(35)
(35) ) and (Equation36
(36)
(36) ). We have now established (Equation32
(32)
(32) ), and so, as has already been pointed out, (Equation27
(27)
(27) ) follows. It is a straightforward consequence of (Equation27
(27)
(27) ) that the map
is an isomorphism. Invoking (Equation33
(33)
(33) ) and (Equation37
(37)
(37) ) shows that there exists b>0 such that
which is (Equation29
(29)
(29) ). To establish (Equation28
(28)
(28) ), let
and set
. Then
for all
, and so, by (Equation29
(29)
(29) ),
. This completes the proof of statements (1) and (2).
To prove statement (3), let . Then, by (Equation27
(27)
(27) ) and the variation-of-parameters formula,
where G and
are the inverse Laplace transforms (impulse responses) of
and
, respectively. Appealing to Proposition 4.3, we obtain that
, showing that λ indeed maps into
. Furthermore, an application of (Equation29
(29)
(29) ) with
and
yields
which establishes (Equation30
(30)
(30) ). It is obvious that λ is linear and it follows from the observability of
that λ is injective. As for surjectivity, let
. By Proposition 4.3,
, and so there exists
such that
. Defining
it is clear that
, whence
is the image of
under λ, completing the proof of statement (3).
To establish statement (4), let with
. By statement (3), we have that
and Corollary 4.5 guarantees that
. The existence of constant c>0 such that (Equation31
(31)
(31) ) holds follows from statement (3) and Lemma 2.3.
The remaining statements (5) and (6) can be proved as in Sarkans and Logemann (Citation2016a, Proof of Theorem 3.2).
Step 2. Let us now remove the assumption that is row reduced. Appealing to statement (1) of Lemma 2.1 and statement (2) of Proposition 2.2, we see that there exists unimodular
such that
is row reduced and
. Let
be a product of suitable row-switching transformations such that
. Obviously,
is unimodular,
is row reduced,
and
, and so Step 1 can be applied with
replaced by
. Since, trivially, any state-space realisation of
is also a realisation of
,
and
(by Corollary 4.4), we conclude that statements (1)–(6) hold, completing the proof.
Whilst Theorem 4.6 has some overlap with Willems (Citation1983, Theorem 5.1), we emphasise that, for our purposes, Theorem 4.6 is more appropriate than Willems (Citation1983, Theorem 5.1). In particular, it contains key results relevant in Section 5 which are not included in Willems (Citation1983), for example, (Equation29(29)
(29) ), (Equation30
(30)
(30) ) and statements (4)–(6).
5. Stability of input-to-output Lur'e systems
Throughout this section, we let ,
and
be as in Section 4, that is,
. Furthermore, let G and
be the inverse Laplace transforms (impulse responses) of
and
, respectively, and let
be a continuous function.
Application of the feedback to (Equation17
(17)
(17) ) results in
(38)
(38) or, equivalently,
where
. We say that (Equation38
(38)
(38) ) is a (higher-order) input-output Lur'e system. Occasionally, it will be convenient to refer to (Equation38
(38)
(38) ) as
.
In this section, we develop a stability theory for the input-output Lur'e system (Equation38(38)
(38) ). We first extend the weak trajectory concept introduced in Section 4 to the nonlinear system (Equation38
(38)
(38) ) and define the associated behaviour. Then, in Proposition 5.1 below, we relate the behaviour of (Equation38
(38)
(38) ) to that of a corresponding state-space Lur'e system, using results from Section 4. Theorem 3.1 and Proposition 5.1 provide the basis for the proof of Theorem 5.2, the main result of the section and the paper.
A pair is a weak trajectory of (Equation38
(38)
(38) ) if
is a weak trajectory of (Equation17
(17)
(17) ). The behaviour
of (Equation38
(38)
(38) ) is defined to be the set of all weak trajectories of (Equation38
(38)
(38) ). Consequently,
if, and only if,
.
The next proposition relates the behaviour of the nonlinear input-output system (Equation38
(38)
(38) ) to the behaviour
of the nonlinear state-space system (Equation6
(6)
(6) ), where
is the realisation of
having the properties guaranteed by Theorem 4.6. Recall that
.
Proposition 5.1
Let and let d and
denote the relative degrees of
and
, respectively. Furthermore, let
be continuous, let S be the realisation of
guaranteed to exist by Theorem 4.6, and define the map
by (Equation10
(10)
(10) ). The following statements hold.
| (1) | For every | ||||
| (2) | Assume that d = 0, | ||||
| (3) | Assume that | ||||
Note that and
as a consequence of statement (5) of Proposition 2.2. If
, then the first sum on the RHS of (Equation40
(40)
(40) ) is defined to be equal to 0. A similar convention applies to (Equation41
(41)
(41) ).
Proof
Proof of Proposition 5.1
To prove statement (1), let . Then
and so, by Theorem 4.6,
, which in turn implies that
. Consequently,
maps into
. To show surjectivity of
, let
. Then
and so, invoking Theorem 4.6, there exists a function
such that
, and hence,
. This shows that
is the image of
under
. In a similar way, injectivity
follows also from Theorem 4.6, as does the existence of a constant b>0 such that (Equation39
(39)
(39) ) holds.
We proceed to prove statement (2). Set and note that the hypotheses on f guarantee (via the local inverse function theorem) that
is open and
is of class
. Let
with
. By Proposition 4.3,
for suitable
. Setting
we have that
As a consequence of Lemma 2.3,
. The function
is locally essentially bounded, and so,
is in
, and it follows that
, and
(42)
(42) Since
is of class
, it follows that
and
. Furthermore,
, and so
. Consequently,
, or, equivalently,
, and, for almost every
,
where we note that, for each
,
is a linear map from
to
. We also note that
is in
, and so, by (Equation42
(42)
(42) ),
. We conclude that
, or, equivalently,
. Repeating this argument shows that
. The inequality (Equation40
(40)
(40) ) is now an immediate consequence of statement (4) of Theorem 4.6.
The proof of statement (3) is similar to that of statement (2), but now F = I, as , and so the argument becomes simpler.
Proposition 5.1 shows, in particular, that (the set of weak trajectories of the input-output Lur'e system) and
(the set of trajectories of the state-space Lur'e system) are equally ‘rich’.
To formulate the main result of the paper, it is convenient to define
The elements of
are called stabilising (complex) feedback matrices for the linear input-output system given by
. If
for all
, then
can be expressed in terms of
as follows:
(43)
(43) Note that the RHS of (Equation43
(43)
(43) ) is identical to that of (Equation5
(5)
(5) ).
The next theorem is the main stability result of this paper.
Theorem 5.2
Let ,
be continuous,
and r>0. Assume that
,
, where
, and that there exists continuous
such that
(44)
(44) The following statements hold.
| (1) | If | ||||
| (2) | If | ||||
Before we prove Theorem 5.2, we provide some commentary and state a corollary. The stability properties described by (Equation45(45)
(45) ) and (Equation46
(46)
(46) ) are the input-output counterparts of the state-space concepts of ISS and integral ISS, respectively, and it would be natural to refer to them as input-to-output stability–not be confused with the classical input-output concept of
-stability (Desoer & Vidyasagar, Citation1975; Vidyasagar, Citation2002)–and integral input-to-output stability, respectively. Adopting this terminology, statement (2) then guarantees ‘small signal’ input-to-output stability and integral input-to-output stability, or strong integral input-to-output stability, for short.
Theorem 5.2 is reminiscent of the complex Aizerman conjecture (Guiver & Logemann, Citation2020; Hinrichsen & Pritchard, Citation1992, Citation2010; Jayawardhana et al., Citation2011; Sarkans & Logemann, Citation2015, Citation2016a, Citation2016b) in the sense that the assumption of stability for all linear feedback gains in the complex ball guarantees stability of the nonlinear Lur'e system for every nonlinearity satisfying the ‘nonlinear’ ball condition (Equation44
(44)
(44) ) with
or
.
Remark 5.3
We note that if , then the largest r>0 such that
is given by
, provided that
(or, equivalently,
), and (Equation44
(44)
(44) ) can be expressed in form of the following ‘nonlinear’ small-gain condition:
where ρ is in
or
.
Under suitable regularity assumptions on f and v, the term on the RHS of (Equation45
(45)
(45) ) and (Equation46
(46)
(46) ) can be replaced by a term involving the norms of the individual derivatives
,
and
, where
, see statements (2) and (3) of Proposition 5.1.
Next, we state a corollary which provides a circle criterion for the stability conditions (Equation45(45)
(45) ) and (Equation46
(46)
(46) ). Recall that a square rational matrix
is said to be positive real if
is positive semi-definite for all complex numbers
which are not poles of
, where
, the Hermitian transposition of
. More information and details on matrix-valued positive-real functions can be found, for example, in Guiver et al. (Citation2017).
The classical circle criterion for absolute stability is usually formulated in an input/output-operator setting or in state-space terms. It guarantees or Lyapunov stability, respectively (see, for example, Desoer & Vidyasagar, Citation1975, Theorem 10, p. 140 or Khalil, Citation2002, Theorem 7.1, p. 265) for all nonlinearities satisfying a certain sector-condition provided that the transfer function of the linear system satisfies a suitable positive-real condition. The nomenclature circle criterion stems from the fact that in the single-input single-output (SISO) case the positive-real condition admits a graphical characterisation involving circles in the complex plane.
Corollary 5.4
Let ,
be continuous,
, assume that
and set
. Assume further that
is positive real, that
is positive definite and that there exists continuous
such that
(47)
(47) where
denotes the usual Euclidean inner product in
. The following statements hold.
| (1) | If | ||||
| (2) | If | ||||
Corollary 5.4 can be derived from Theorem 5.2 by arguments similar to those used in the proof of Sarkans and Logemann (Citation2016a, Corollary 4.6) and, therefore, we do not go into details.
In the single-input single-output case (m = p = 1), where and
are scalars with
, the following inequalities
(48)
(48) may seem more natural than the sector condition (Equation47
(47)
(47) ). In (Equation48
(48)
(48) ),
and
are functions from
to
. The inequalities in (Equation48
(48)
(48) ) mean that the graph of f is ‘sandwiched’ between the straight lines
and
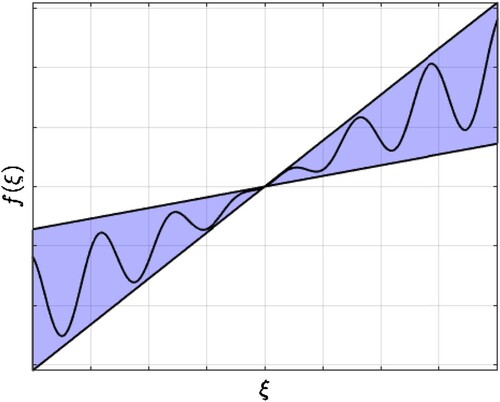
and is bounded away from these lines by
. A graphical illustration is shown in Figure .
Figure 1. Illustrative sector condition (Equation48(48)
(48) ) when m = p = 1 with
. The straight lines have slopes
.
To link the conditions (Equation47(47)
(47) ) and (Equation48
(48)
(48) ), the following simple result on comparison functions is useful.
Lemma 5.5
If is continuous and such that
, then there exists
such that
for all s>0. Furthermore, if
, then
.
Although the proof of the above lemma is not difficult, it is, for completeness and for the convenience of the reader, included in the Appendix.
The corollary below provides the desired link between (Equation47(47)
(47) ) and (Equation48
(48)
(48) ).
Corollary 5.6
Let and
be real scalars with
, let
be continuous and such that
for all s>0, j = 1, 2, and
(49)
(49) If (Equation48
(48)
(48) ) holds, then there exists
such that
Furthermore, if
for j = 1, 2, then
.
Proof.
Arguments similar to those used in the proof of Sarkans and Logemann (Citation2015, Corollary 3.13) show that if (Equation48(48)
(48) ) holds, then
The claim now follows from Lemma 5.5
Proof
Proof of Theorem 5.2
Let be the state-space realisation of the input-output system
guaranteed to exist by Theorem 4.6. As
, it is clear that I−DK is invertible. Setting
, we have that
. Therefore,
, and so,
is Hurwitz. It follows from statement (5) of Theorem 4.6 that
is stabilizable. Now
is observable, and a fortiori
is detectable, implying that (Equation5
(5)
(5) ) holds. Furthermore,
for all
(because otherwise
could not be Hurwitz), and thus, (Equation43
(43)
(43) ) is satisfied. Consequently,
, whence
by assumption. We conclude that the hypotheses of Theorem 3.1 are satisfied.
To prove statement (1), we first note that, for all ,
, where
,
and
, and thus,
By hypothesis,
, and we conclude that there exists a constant b>0 such that
(50)
(50) Next we apply statement (1) of Theorem 3.1 by which there exist
and
such that, for all
Combining this with (Equation50
(50)
(50) ) yields, for all
(51)
(51) where
and
are defined by
and
for all
. Using Proposition 5.1, there exists c>0 such that
where x is the unique function in
such that
. Hence, invoking (Equation51
(51)
(51) ), we conclude that, for all
,
where
is given by
for all
, completing the proof of statement (1).
Statement (2) can be proved by a similar argument, with the application of statement (1) of Theorem 3.1 replaced by that of statement (2) of Theorem 3.1.
In the corollary below, we consider the situation wherein condition (Equation44(44)
(44) ) is only satisfied on the complement of a bounded set. It turns out that some form of stability, reminiscent of practical ISS or ISS with bias (see, for example, Jayawardhana et al., Citation2009, Citation2011; Mironchenko, Citation2019), is retained under this weaker assumption.
Corollary 5.7
Let ,
be continuous,
and r>0. If
,
, where
, and there exist
and a>0 such that
then there exist
,
and b>0 such that, for all
,
(52)
(52)
Proof.
To make use of Theorem 5.2, we introduce a modified nonlinearity defined by
Note that
is continuous and
where
is given by
An application of Theorem 5.2 to the system
shows that there exist
and
such that, for all
,
(53)
(53) Furthermore, if
, then
, where
for all
. Clearly,
for all
. It now follows from (Equation53
(53)
(53) ) that, for all
, (Equation52
(52)
(52) ) holds with
.
Finally, we introduce a certain type of initial-value problem for (Equation38(38)
(38) ). Due to the lack of regularity of weak trajectories, it is not immediately clear how an initial-value problem for (Equation38
(38)
(38) ) can be defined. We will now briefly explain how this can be done. To this end, we introduce the vector space
and note that
, as follows from statement (1) of Proposition 4.3 and statement (1) of Theorem 4.6. Moreover,
for every
(because if
, then
, and thus,
by Proposition 4.3).
The next result shows that, under a suitable local invertibility conditions on the map I−Df, the assumptions of Theorem 5.2 ensure that, for every and every
, there exists a unique
such that
and
.
Proposition 5.8
Imposing the notation and assumptions of Theorem 5.2, assume further that f is locally Lispchitz, (Equation44(44)
(44) ) holds with
, and
defined by (Equation10
(10)
(10) ) is of class
with
for all
, where
. Then, for all
and
, there exists a unique
such that
and
.
Trivially, the conditions involving are satisfied when D = 0.
Proof
Proof of Proposition 5.8
Let be the state-space realisation of the input-output system
guaranteed to exist by Theorem 4.6. As has been shown in the proof of Theorem 5.2,
, and so, the assumptions of statement (3) of Proposition 3.2 are satisfied.
Let and
. Recalling the notation
,
and
, and invoking Theorem 4.6, there exists
such that
(54)
(54) By statement (3) of Proposition 3.2, there exists a unique pair
such that
and
. An application of statement (1) of Proposition 5.1 shows that
. As
we have that
, and so
. To show uniqueness, assume that
satisfies
. Another application of statement (1) of Proposition 5.1 shows that there exists
such that
and so
. Consequently,
, and thus, appealing to (Equation54
(54)
(54) ),
. This in turn leads to
It now follows from (Equation28
(28)
(28) ) that
. But as
is the unique pair such that
and
, it follows that
and
, completing the proof.
6. Examples
In this section we will illustrate the input-to-output stability results of Section 5 by three examples.
Example 6.1
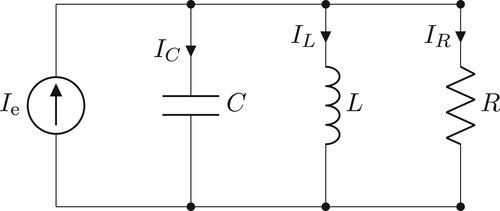
Consider the resistor-inductor-capacitor (RLC) circuit with a current source shown in Figure and inspired by the electrical circuit example discussed in Jayawardhana et al. (Citation2011, p. 34). The inductor and capacitor are modelled as linear, time-invariant components, with positive constants L (inductance) and C (capacitance). The resistor is nonlinear with current-voltage characteristic given by the (continuous) function f, that is, , where
and
denote the current and voltage, respectively, associated with the nonlinear resistive element. Taking into account the signs of the potential differences, an application of Kirchoff's voltage law gives that the voltages across all the components are equal, and the following differential equation
holds, where V is the voltage and
is the current of the external source. Setting y = V,
and
, we arrive at
(55)
(55) which is of the the form (Equation38
(38)
(38) ) with
. As C and L are positive, it it is clear that, in the linear case wherein
, with real gain parameter k, the associated differential equation
is asymptotically stable if, and only if, k>0. Setting
, we have that
and
if, and only if, k>0. As
for all
, we conclude that
if, and only if, k>0. Using elementary calculus, it can be shown that
Consequently, it follows from statement (1) of Theorem 5.2 and Remark 5.3 that, for every continuous function
satisfying
(56)
(56) for some k>0 and
, there exist
and
such that (Equation45
(45)
(45) ) holds for all
, where
and y = V.
Figure 2. RLC circuit of Example 6.1.
To capture the situation when f is a so-called negative resistance element (such as a tunnel-diode see, for example, Khalil, Citation2002, Section 1.2.2), meaning that ,
, and
as
, we note that Remark 5.3 and Corollary 5.7 guarantee that, for every continuous function
satisfying
(57)
(57) for some a, k>0 and
, there exist
,
and b>0 such that (Equation52
(52)
(52) ) holds for all
, where
and y = V.
Noting that for this example , it follows from Proposition 5.8 that, for every
, there exists a unique weak trajectory
) satisfying
. A routine calculation shows that ζ and
are related as follows
To illustrate our results numerically, we present two simulations. The following model data are common to both:
and the bounded, periodic and discontinuous forcing term
where
is an amplitude parameter, with a = 0 giving rise to the unforced input-output Lur'e system. We consider two nonlinearities
given by
where
denotes the largest integer less or equal to x and
,
,
(if x and z are integers, then
is the remainder after division of x by z). The functions
and
have been chosen somewhat arbitrarily to illustrate a positive- and negative-resistance element, respectively. The function
is globally Lipschitz, but not differentiable everywhere. Graphs of the functions
and
are plotted in Figure (a,b) illustrates that
and
, respectively, satisfy (Equation56
(56)
(56) ) and (Equation57
(57)
(57) ), both for some
. Furthermore, note that
does not satisfy (Equation56
(56)
(56) ). These properties are readily verified mathematically.
Figure 3. Numerical simulation results from Example 6.1. (a) Graphs of (b) Graphs of
. The dotted straight lines have slope
. In both panels, j = 1 is shown in solid line and j = 2 in dashed-dotted line. (c) Outputs
for specified values of a. (d) Outputs
for specified values of a.
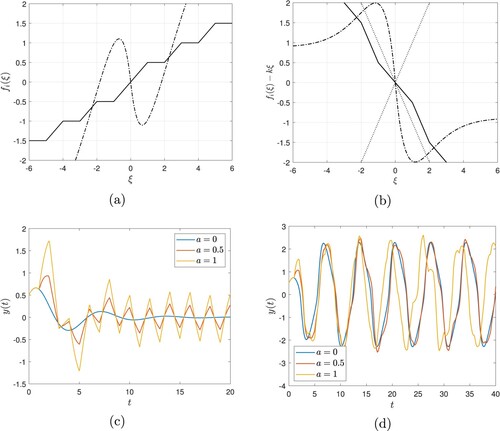
Let denote the unique weak trajectory of (Equation55
(55)
(55) ) with
, that is,
for
. Graphs of the output trajectories plotting
against t are shown in Figures (c) (j = 1) and (d) (j = 2). In both figures, the blue lines denote the output trajectory subject to zero forcing, which converges to zero when
, and is seen to boundedly oscillate when
. These trajectories have been plotted for comparison purposes. As expected from the estimate (Equation45
(45)
(45) ), the solutions
are bounded and we observe larger deviation from the converging solution of the unforced equation as the magnitude parameter a increases. Similar observations apply to
, but now deviations from the oscillatory unforced solution are observed–behaviour which is compatible with the practical input-to-output stability estimate (Equation52
(52)
(52) ) via the ‘offset’ term b.
In the next example, we provide an illustration of Corollary 5.4 (the circle criterion).
Example 6.2
The following linear input-output system is considered in Polderman and Willems (Citation1998, Example 3.3.25)
(58)
(58) The transfer function
is proper, but not strictly proper. Applying the feedback
to (Equation58
(58)
(58) ) leads to
which is of the form (Equation38
(38)
(38) ) with
. To apply Corollary 5.4, we set
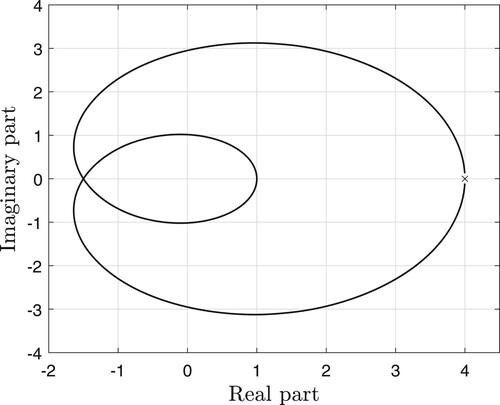
for
, plot the Nyquist diagram of
in Figure , and consider two cases.
Figure 4. Nyquist plot for in Example 6.2.
Case 1: . In this case,
is positive real if, and only if,
is positive real, or, equivalently, if, and only if,
(59)
(59) An inspection of Figure yields that (Equation59
(59)
(59) ) holds if
. Consider a continuous nonlinearity satisfying
for continuous functions
, where it is assumed that
and
for all s>0 and (Equation49
(49)
(49) ) holds. An application of Corollary 5.6 shows that there exists
(with
if
for j = 1, 2) such that
which is of the form (Equation47
(47)
(47) ) with
and
. If
for j = 1, 2, then it follows from statement (1) of Corollary 5.4 that there exist
and
such that (Equation45
(45)
(45) ) holds for all
. Similarly, if
or
then statement (2) of Corollary 5.4 shows that there exist
,
and b>0 such that (Equation45
(45)
(45) ) holds for all
with
and (Equation46
(46)
(46) ) is satisfied for every trajectory
.
Case 2: . We note that
is positive real if, and only if,
is positive real, or, equivalently, if, and only if,
It follows from Figure that the above condition is satisfied for
. Consider a continuous nonlinearity satisfying
where
are continuous,
and
for all s>0 and (Equation49
(49)
(49) ) holds. Corollaries 5.4 and 5.6 allow us to derive conclusions similar to those in Case 1. We leave the details to the reader.
In the third and final example, we study a simple multivariable system.
Example 6.3
Consider the input-output Lur'e system
(60)
(60) where
and
is continuous. As usual, we set
and thus,
Furthermore, defining
it is a routine exercise to show that
is positive real if, and only if,
, where
. It follows from Logemann and Townley (Citation1997, Lemma 3.10) that
(61)
(61) Consequently,
and, as
, the above equation yields that
As
for all
, we conclude that
for all
. An application of statement (1) of Theorem 5.2 and Remark 5.3 with
,
, shows that, for every continuous function
for which there exist
and
such that
there exist
and
such that (Equation45
(45)
(45) ) holds for all
.
Now consider system (Equation60(60)
(60) ) with
replaced by
, that is,
where
and the polynomial matrices
and
are as before. We set
, and so,
Setting
, it follows from (Equation61
(61)
(61) ) that
Obviously,
for all
, and thus,
for all
. An application of statement (2) of Theorem 5.2 and Remark 5.3 with K: = kI,
, shows that, for every continuous function
for which there exist
and
such that
(62)
(62) there exist
,
and b>0 such that (Equation45
(45)
(45) ) holds for all
with
and (Equation46
(46)
(46) ) is satisfied for all
.
Finally, let us analyse the special case wherein and f is a saturation nonlinearity of the form
Then
(63)
(63) whence
where
is given by
Hence (Equation62
(62)
(62) ) holds with
, and thus, for every a>0, there exist comparison functions
,
and a constant b>0 such that (Equation45
(45)
(45) ) holds for all
with
and (Equation46
(46)
(46) ) is satisfied for all
. Finally, (Equation63
(63)
(63) ) necessitates that any
for which (Equation62
(62)
(62) ) holds with
and
satisfies
for all
, that is, α is bounded. Consequently, (Equation62
(62)
(62) ) cannot hold with
, and therefore, we should not expect the conclusions of statement (1) of Theorem 5.2 to hold in the current scenario.
7. Conclusions
We have studied a class of forced continuous-time Lur'e systems obtained by applying nonlinear feedback to a higher-order linear differential equation which defines an input-output system in the sense of behavioural systems theory. A stability theory has been developed for this class of systems with the underlying stability concepts being input-output versions of the input-to-state stability and strong integral input-to-state properties for nonlinear state-space control systems. Our main results are Theorem 5.2 and Corollary 5.4. Theorem 5.2 is reminiscent of the complexified Aizerman conjecture, and states that if all complex gains in a certain ball are stabilising for the associated unforced, linear input-output system, then stability for the corresponding input-output Lur'e system is ensured for all nonlinearities satisfying the corresponding ‘nonlinear’ ball condition (Equation44(44)
(44) ). Corollary 5.4 is a novel version of the circle criterion, the hypotheses of which can be checked graphically in the single-input single-output case, although the result is valid in the general multivariable case.
The ISS theory for controlled state-space Lur'e systems developed in Sarkans and Logemann (Citation2015) and Guiver and Logemann (Citation2020) provide key tools for the proof of our main results. For this suitable state-state space realisations are required (or, more accurately, relationships between the behaviours of state-space and input-output Lur'e systems) which can be found in Theorem 4.6 and Proposition 5.1, and are of some independent interest. Whilst these results do show that stability of higher-order input-output Lur'e systems can be resolved by converting to a state-space formulation, in practice this is often unsatisfactory. Indeed, many control systems are naturally specified in input-output form and state-space realisations frequently introduce ‘unphysical’ variables irrelevant to the problem under consideration. The availability of stability criteria formulated in terms of the input-output model, such as Theorem 5.2 and Corollary 5.4, is therefore of key importance.
By way of potential future work, it has recently been commented in Sepulchre et al. (Citation2022) that, roughly, incremental stability concepts are more important than stability notions alone. In fact, the work (Sepulchre et al., Citation2022) notes that incremental stability used to have more prominence in the control theory community than perhaps it currently does, and that attention should refocus on this area. Incremental stability broadly refers to bounding the difference of two arbitrary trajectories of a given system; see, for instance Aminzare and Sontagy (Citation2014), Angeli (Citation2002), and Rüffer et al. (Citation2013). The recent works (Gilmore et al., Citation2020, Citation2021; Guiver et al., Citation2019) have shown how many absolute stability criteria generalise to ensure incremental stability for various forced state-space Lur'e systems, and we expect that input-output versions of some of these results could be derived.
Statements and declarations
The Matlab routines used to generate the figures in Section 6 are available from the corresponding author on request. Data sharing is not otherwise applicable to this article as no other datasets were generated or analysed during the current study.
Disclosure statement
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Funding
References
- Ambrosetti, A., & Prodi, G. (1993). A primer of nonlinear analysis, Cambridge Studies in Advanced Mathematics, vol. 34, Cambridge University Press.
- Aminzare, Z., & Sontagy, E. D. (2014). Contraction methods for nonlinear systems: A brief introduction and some open problems. In 53rd IEEE conference on decision and control (pp. 3835–3847). IEEE.
- Angeli, D. (2002). A Lyapunov approach to the incremental stability properties. IEEE Transactions on Automatic Control, 47(3), 410–421. https://doi.org/10.1109/9.989067
- Arcak, M., & Teel, A. (2002). Input-to-state stability for a class of Lurie systems. Automatica Journal of IFAC, 38(11), 1945–1949. https://doi.org/10.1016/S0005-1098(02)00100-0
- Blomberg, H., & Ylinen, R. (1983). Algebraic theory for multivariable linear systems, Mathematics in Science and Engineering, vol. 166, Academic Press Inc.
- Boiko, I. M., Kuznetsov, N. V., Mokaev, R. N., Mokaev, T. N., Yuldashev, M. V., & Yuldashev, R. V. (2022). On counter-examples to Aizerman and Kalman conjectures. International Journal of Control, 95(4), 906–913. https://doi.org/10.1080/00207179.2020.1830304
- Brockett, R. W., & Willems, J. L. (1965a). Frequency domain stability criteria. I. IEEE Transactions on Automatic Control, AC-10(3), 255–261. https://doi.org/10.1109/TAC.1965.1098143
- Brockett, R. W., & Willems, J. L. (1965b). Frequency domain stability criteria. II. IEEE Trans. Automatic Control, AC-10(4), 407–413. https://doi.org/10.1109/TAC.1965.1098198
- Carrasco, J., & Heath, W. P. (2021). Absolute stability. In J. Webster (Ed.), Wiley encyclopedia of electrical and electronics engineering (pp. 1–12). John Wiley & Sons, Ltd.
- Carrasco, J., Turner, M. C., & Heath, W. P. (2016). Zames-Falb multipliers for absolute stability: from O'Shea's contribution to convex searches. European Journal of Control, 28, 1–19. https://doi.org/10.1016/j.ejcon.2015.10.003
- Chaillet, A., Angeli, D., & Ito, H. (2014). Combining iISS and ISS with respect to small inputs: the strong iISS property. IEEE Transactions on Automatic Control, 59(9), 2518–2524. https://doi.org/10.1109/TAC.9
- Dashkovskiy, S., Efimov, D. V., & Sontag, E. D. (2011). Input to state stability and allied system properties. Automation and Remote Control, 72(8), 1579–1614. https://doi.org/10.1134/S0005117911080017
- Deimling, K. (1985). Nonlinear functional analysis. Springer-Verlag.
- Delchamps, D. F. (1988). State space and input-output linear systems. Springer-Verlag.
- De Marco, G., Gorni, G., & Zampieri, G. (1994). Global inversion of functions: an introduction. Nonlinear Differential Equations and Applications NoDEA, 1(3), 229–248. https://doi.org/10.1007/BF01197748
- Desoer, C. A., & Vidyasagar, M. (1975). Feedback systems: input-output properties. Academic Press.
- Doetsch, G. (1950). Handbuch der Laplace-Transformation. Band I. Theorie der Laplace-Transformation. Verlag Birkhäuser.
- Drummond, R., Guiver, C., & Turner, M. C (2022). Aizerman Conjectures for a class of multivariate positive systems. IEEE Transactions on Automatic Control, 68(8), 5073–5080. https://doi.org/10.1109/TAC.2022.3217740
- Franco, D., Guiver, C., & Logemann, H. (2021). Persistence and stability for a class of forced positive nonlinear delay-differential systems. Acta Applicandae Mathematicae, 174(1), 1. https://doi.org/10.1007/s10440-021-00414-5
- Fuhrmann, P. A., & Helmke, U. (2015). The mathematics of networks of linear systems, Universitext, Springer.
- Gilmore, M. E., Guiver, C., & Logemann, H. (2020). Infinite-dimensional Lur'e systems with almost periodic forcing. Mathematics of Control, Signals, and Systems, 32(3), 327–360. https://doi.org/10.1007/s00498-020-00262-y
- Gilmore, M. E., Guiver, C., & Logemann, H. (2021). Incremental input-to-state stability for Lur'e systems and asymptotic behaviour in the presence of Stepanov almost periodic forcing. Journal of Differential Equations, 300, 692–733. https://doi.org/10.1016/j.jde.2021.08.009
- Gohberg, I., Lancaster, P., & Rodman, L. (1982). Matrix polynomials, Computer Science and Applied Mathematics, Academic Press, Inc. [Harcourt Brace Jovanovich, Publishers].
- Guiver, C., & Logemann, H. (2020). A circle criterion for strong integral input-to-state stability. Automatica, 111, Article 108641. https://doi.org/10.1016/j.automatica.2019.108641
- Guiver, C., & Logemann, H. (2022). The circle criterion for a class of sector-bounded dynamic nonlinearities. Mathematics of Control, Signals, and Systems, 34(3), 461–492. https://doi.org/10.1007/s00498-022-00324-3
- Guiver, C., Logemann, H., & Opmeer, M. R. (2017). Transfer functions of infinite-dimensional systems: positive realness and stabilization. Mathematics of Control, Signals, and Systems, 29(4), 1–61. https://doi.org/10.1007/s00498-017-0203-z
- Guiver, C., Logemann, H., & Opmeer, M. R. (2019). Infinite-dimensional Lur'e systems: Input-to-state stability and convergence properties. SIAM Journal on Control and Optimization, 57(1), 334–365. https://doi.org/10.1137/17M1150426
- Haddad, W. M., & Chellaboina, V. (2008). Nonlinear dynamical systems and control. Princeton University Press.
- Hinrichsen, D., & Pritchard, A. J. (1992). Destabilization by output feedback. Differential and Integral Equations, 5(2), 357–386. https://doi.org/10.57262/die/1371043976
- Hinrichsen, D., & Pritchard, A. J. (2010). Mathematical systems theory I, Texts in Applied Mathematics vol 48, Springer.
- Jayawardhana, B., Logemann, H., & Ryan, E. P. (2009). Input-to-state stability of differential inclusions with applications to hysteretic and quantized feedback systems. SIAM Journal on Control and Optimization, 48(2), 1031–1054. https://doi.org/10.1137/070711323
- Jayawardhana, B., Logemann, H., & Ryan, E. P. (2011). The circle criterion and input-to-state stability. IEEE Control Systems Magazine, 31(4), 32–67. https://doi.org/10.1109/MCS.2011.941143
- Kailath, T. (1980). Linear systems, Prentice-Hall Information and System Sciences Series, Prentice-Hall, Inc.
- Kellett, C. M. (2014). A compendium of comparison function results. Mathematics of Control, Signals, and Systems, 26(3), 339–374. https://doi.org/10.1007/s00498-014-0128-8
- Khalil, H. K. (2002). Nonlinear systems (3rd ed.). Prentice Hall.
- Kwakernaak, H., & Sivan, R. (1991). Modern signals and systems. Prentice-Hall.
- Leonov, G. A. (2001). Mathematical problems of control theory, Series on Stability, Vibration and Control of Systems. Series A: Textbooks, Monographs and Treatises, vol. 6, World Scientific Publishing Co., Inc.
- Logemann, H., & Townley, S. (1997). Discrete-time low-gain control of uncertain infinite-dimensional systems. IEEE Transactions on Automatic Control, 42(1), 22–37. https://doi.org/10.1109/9.553685
- Mironchenko, A. (2019). Criteria for input-to-state practical stability. IEEE Transactions on Automatic Control, 64(1), 298–304. https://doi.org/10.1109/TAC.2018.2824983
- Pendharkar, I., & Pillai, H. K. (2008). Systems with sector bound nonlinearities: A behavioral approach. Systems & Control Letters, 57(2), 112–122. https://doi.org/10.1016/j.sysconle.2007.06.019
- Polderman, J. W., & Willems, J. C. (1998). Introduction to mathematical systems theory, Texts in Applied Mathematics, vol. 26. Springer-Verlag.
- Rosenbrock, H. H. (1970). State-space and multivariable theory. John Wiley & Sons, Inc. [Wiley Interscience Division].
- Rüffer, B. S., van de Wouw, N., & Mueller, M. (2013). Convergent system vs. incremental stability. Systems & Control Letters, 62(3), 277–285. https://doi.org/10.1016/j.sysconle.2012.11.015
- Sandberg, I. W. (1980). Global inverse function theorems. IEEE Transactions on Circuits and Systems, 27(11), 998–1004. https://doi.org/10.1109/TCS.1980.1084740
- Sarkans, E., & Logemann, H. (2015). Input-to-state stability of Lur'e systems. Mathematics of Control, Signals, and Systems, 27(4), 439–465. https://doi.org/10.1007/s00498-015-0147-0
- Sarkans, E., & Logemann, H. (2016a). Stability of higher-order discrete-time Lur'e systems. Linear Algebra and Its Applications, 506, 183–211. https://doi.org/10.1016/j.laa.2016.05.012
- Sarkans, E., & Logemann, H. (2016b). Input-to-state stability of discrete-time Lur'e systems. SIAM Journal on Control and Optimization, 54(3), 1739–1768. https://doi.org/10.1137/130939067
- Sepulchre, R., Chaffey, T., & Forni, F. (2022). On the incremental form of dissipativity. arXiv preprint. https://doi.org/10.48550/arXiv.2208.04879
- Sontag, E. D. (1989). Smooth stabilization implies coprime factorization. IEEE Transactions on Automatic Control, 34(4), 435–443. https://doi.org/10.1109/9.28018
- Sontag, E. D. (2008). Input to state stability: Basic concepts and results. In Nonlinear and optimal control theory. Lecture Notes in Math., vol. 1932 (pp. 163–220). Springer.
- Sontag, E. D., & Wang, Y. (1999). Notions of input to output stability. Systems & Control Letters, 38(4–5), 235–248. https://doi.org/10.1016/S0167-6911(99)00070-5
- Vidyasagar, M. (2002). Nonlinear systems analysis, Classics in Applied Mathematics, vol. 42, Society for Industrial and Applied Mathematics (SIAM). Reprint of the second (1993) edition.
- Willems, J. C. (1983). Input-output and state-space representations of finite-dimensional linear time-invariant systems. Linear Algebra and Its Applications, 50, 581–608. https://doi.org/10.1016/0024-3795(83)90070-8
- Willems, J. L. (1970). Stability theory of dynamical systems. John Wiley & Sons.
- Yakubovich, V. A., Leonov, G. A., & Gelig, A. K. (2004). Stability of stationary sets in control systems with discontinuous nonlinearities, Series on Stability, Vibration and Control of Systems. Series A: Textbooks, Monographs and Treatises, vol. 14, World Scientific Publishing Co., Inc.
- Zemanian, A. H. (1987). Distribution theory and transform analysis. Dover Publications, Inc. Reprint of the 1965 original published by McGraw-Hill.
Appendix
Here we provide proofs of Proposition 2.2, and Lemmas 2.3 and 5.5.
Proof
Proof of Proposition 2.2
To prove statement (1), denote the entries of ,
and
by
,
and
, respectively. Choose
and
such that
. As
, we conclude that
(A1)
(A1) Let
be such that the maximum on the RHS of (EquationA1
(A1)
(A1) ) is achieved for
. It follows from (EquationA1
(A1)
(A1) ) that
We proceed to establish statement (2). Let
be such that
,
is unimodular and
is row reduced. It is sufficient to show that
. Let
be the row degrees of
and set
Using statement (2) of Lemma 2.1, we conclude that the limit matrix
is invertible. Therefore, as
, we may conclude that
(A2)
(A2) Furthermore, writing
we have that
As
, we see that
,
, and thus
implying that
Hence, by (EquationA2
(A2)
(A2) ),
, showing that
.
Statement (3) follows from statement (2) and the fact that there exists a unimodular matrix such that
is row reduced (see statement (1) of Lemma 2.1).
To prove statements (4) and (5), we use statement (1) of Lemma 2.1 which guarantees the existence of unimodular such that
is row reduced. By statement (2),
and thus,
showing that statement (4) holds. Moreover, since
, statement (1) yields that
(A3)
(A3) By hypothesis,
, and so,
, whence
. Invoking (EquationA3
(A3)
(A3) ) shows that
, establishing statement (5).
Finally, we proceed to prove statement (6). By statement (3) there exists unimodular such that
. This means that there exists
such that
. As
, we conclude that Γ is invertible. Thus,
, showing that
is unimodular.
Proof
Proof of Lemma 2.3
Let . We may assume that
. By a well-known result on the differentiation of a convolution (see, for instance, Doetsch, Citation1950, Kapitel 2, Section 14, Satz 10),
(A4)
(A4)
We note that if , then
and
. By differentiating (EquationA4
(A4)
(A4) ) repeatedly, we conclude that
. If d = 1, then (EquationA4
(A4)
(A4) ) implies that
. Moreover, if
, then the initial-value theorem (see, for example, Doetsch, Citation1950, Kapitel 14, Section 2, Satz 4 or Zemanian, Citation1987, Corollary 8.6-1a) guarantees that
and repeated differentiation of (EquationA4
(A4)
(A4) ) shows that
. Finally, in each case, the process of repeated differentiation leads to (Equation3
(3)
(3) ).
Proof
Proof of Lemma 5.5
Define by
and
The function β is continuous and non-decreasing,
and
for all s>0. Furthermore, if
, then
as
. Setting
we have that
,
for all s>0, and, if
, then
.