

Graphical Abstract
Abstract
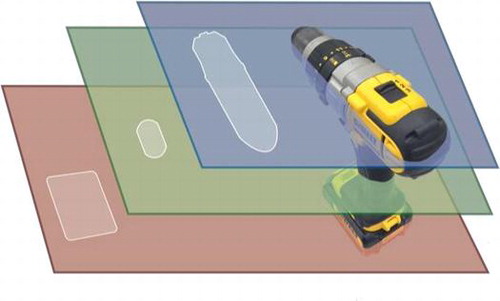
Reliable manipulation of everyday household objects is essential to the success of service robots. In order to accurately manipulate these objects, robots need to know objects’ full 6-DOF pose, which is challenging due to sensor noise, clutters, and occlusions. In this paper, we present a new approach for effectively guessing the object pose given an observation of just a small patch of the object, by leveraging the fact that many household objects can only keep stable on a planar surface under a small set of poses. In particular, for each stable pose of an object, we slice the object with horizontal planes and extract multiple cross-section 2D contours. The pose estimation is then reduced to find a stable pose whose contour matches best with that of the sensor data, and this can be solved efficiently by cross-correlation. Experiments on the manipulation tasks in the DARPA Robotics Challenge validate our approach. In addition, we also investigate our method’s performance on object recognition tasks raising in the challenge.
Keywords:
Notes
No potential conflict of interest was reported by the authors.