

Abstract
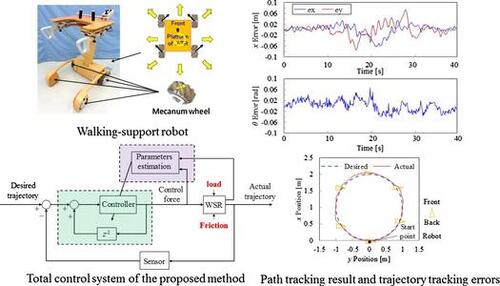
Walking is the most fundamental requirement for independent living in daily life. An intelligent walking-support robot has been developed for use by people with walking disabilities. To appropriately assist the user, the robot must precisely track the user’s intentions. However, the robot’s tracking accuracy is severely compromised by time-varying friction, center-of-gravity (CoG) shifts, and load changes induced by the user. In a previous study, we proposed a digital acceleration controller with online inertial parameter identification. However, the tracking accuracy was still affected by CoG shifts introduced by the users. To address these issues, the current study investigated a novel dynamic model, wherein all the load and CoG information processed in the inertial matrix was derived and a new digital acceleration controller with parameter estimation was used to compensate for the time-varying friction, CoG shifts, and load changes. Experiments were conducted under different floor and load conditions to demonstrate the improved tracking accuracy of the proposed control method.
Acknowledgements
The authors thank the associate editor and reviewers for constructive comments and suggestions that have helped improve the quality and presentation of this paper.
Notes
This paper is selected as the "Cutting Edge of Robotics in Japan" by the Editorial Committee of Advanced Robotics.